Автономный транспорт — Википедия
Материал из Википедии — свободной энциклопедии
Автономный транспорт — это вид транспорта, основанный на автономной системе управления. Управление автономным транспортным средством полностью автоматизировано и осуществляется без водителя при помощи оптических датчиков, радиолокации и компьютерных алгоритмов. Основное назначение автономного транспорта заключается в перемещении пассажиров или грузов.
Транспортные средства, доступные для потребителей в настоящее время, содержат функции вождения на базе компьютерных технологий, такие как парковочный автопилот или круиз-контроль. Эти особенности рассматриваются как базовый уровень автономии. К стандартным функциям добавляется способность предупреждать водителей об опасности, контроль тормозов, рулевого управления и т. д.
Как сообщает группа американских экспертов из General Motors Co (неопр.) (недоступная ссылка). Архивировано 28 ноября 2013 года., настоящие автономные транспортные средства появятся не ранее 2020 года. Майк Робинсон, вице-президент «General Motors» по устойчивости и глобальному регулированию дел заявил, что транспортные средства, способные доставить в пункт назначения без управления со стороны человека появятся «в значительно отдаленном будущем».
Разработки автономных транспортных средств принадлежат компаниям Google, Nissan, Robot Car UK, General Motors и Yandex. В мае 2012 года корпорация Google получила свою первую лицензию на беспилотные автомобили в некоторых американских штатах (Невада, Флорида и Калифорния). Тестовый автомобиль — робот, созданный на базе Lexus RX, проехал около семисот тысяч километров. Большое количество приборов и датчиков, расположенное на крыше автомобиля, позволяет следить за дорогой, объезжать ямы, избегать столкновений, останавливаться на светофорах и парковаться.
Lexus RX 450h корпорации GoogleВеликобритания дала разрешение на использование автомобилей с автономной системой управления в 2013 году. Правительство выделило около 28 миллиардов фунтов стерлингов для обновления дорожной системы и проекта с автономными автомобилями. Представители выказали уверенность в том, что автономная система управления сможет снизить загруженность дорог, а также повысить уровень безопасности участников движения. Тестированием таких транспортных средств в Великобритании будет заниматься команда исследователей из Оксфордского университета (неопр.)., руководителем группы является профессор Пол Ньюман.
Компания Volvo работает над системой автоматической парковки. С помощью неё можно будет поставить машину на свободное место без участия водителя. Предполагается, что автомобиль самостоятельно найдет нужное место на парковке. Владельцу достаточно выйти из машины и отправить со своего смартфона соответствующий сигнал. Такая система появится уже в новой версии Volvo XC90. «Автономный парковщик» также разрабатывает компания Audi.
В Дубае уже существует роботизированная парковка (неопр.)
Induct Technology совместно с École Polytechnique Fédérale de Lausanne разработали новый вид транспорта — автомобиль-робот Navia, осуществляющий движение при помощи электрической тяги (неопр.). Автомобиль способен перевозить около 8-ми человек со скоростью не более 30 км/ч. В основе управления лежит использование новых сенсорных технологий, с помощью которых Navia обнаруживает и объезжает препятствия. Экран, расположенный в салоне, предлагает различные остановки и пункты назначения. Пассажирам остается только выбрать направление и следовать заданному маршруту.
По данным журнала The Economist (неопр.)., около 90 % всех ДТП происходят из-за человеческих ошибок. Беспилотные автомобили Google наездили уже несколько тысяч километров без единой аварии. Специалисты считают, что автономные транспортные средства могут значительно снизить количество транспортных происшествий и аварий, которые происходят из-за ошибки водителя. В то время как безопасность является наиболее важным преимуществом, внедрение автономных транспортных средств может уменьшить заторы и улучшить экономию топлива.
Что это на самом деле означает
Автомобили с автопилотом: Справочник.
Наверняка вы слышали о полуавтономных и полностью автономных автомобилях? Большинство поверхностно понимают, о чем идет речь. Но не все детально понимают, что же такое автомобиль с системой автопилота. Предлагаем вам обзор об этой инновационной технологии в автопромышленности.
Автономные автомобили становятся реальностью. Остается все меньше времени до того, как нас начнут массово окружать различные транспортные средства с автономными системами управления. По прогнозу к 2030 году больше половины автомобилей в мире будет оснащаться системой автопилота. Так что не ровен тот час, когда мы, садясь в машину, вместо того чтобы управлять машиной, зададим маршрут следования, откинемся на спинку комфортного кресла, для того чтобы во время движения заняться чтением любимой книги, газеты или журнала или провести время в дороге за просмотром фильма, отправимся в дорогу, доверившись компьютеру.
Вы думаете, что это все-таки фантастика и до такого развития технологий еще очень и очень далеко? Нет, вы ошибаетесь. На самом деле автономные технологии уже пришли в автопромышленность. Например, в новом поколении Мерседес Е-класса устанавливается автономная система, которая работает на скорости до 120 км/ч и в полуавтоматическом режиме способна управлять автомобилем без участия водителя.
Вот список того, что может автопилот Е-класса:
— Автоматической набор скорости
— Автоматическое торможение для поддержания дистанции
— Автоматическое экстренное торможение для предотвращения столкновения
— Автоматическое поддержание крейсерской скорости (адаптивный круиз-контроль)
— Автоматический контроль движения в полосе
— Автоматическое перестроение в другую полосу
— Автоматический контроль светофоров и дорожных знаков
Почему же тогда эта система называется полуавтономной? Несмотря на все эти автономные функции автопилота, все-таки по-прежнему машина не может передвигаться без водителя, поскольку например, во время обгона водитель должен контролировать скорость и маневр, так как радарная система машины еще не так идеальна и совершенна, что не позволяет электроники оценить на достаточном уровне скорость соседних машин.
Также нынешняя технология автономного управления, устанавливаемая на новый Е-класс, настроена таким образом, что система оставляет большое расстояние между двумя автомобилями, для того чтобы плавно снизить скорость в случае необходимости. Но в случае если перед вами резко кто-то перестроится, то автоматическая система может сработать с задержкой, либо снизить скорость слишком резко. Именно поэтому водитель все-таки должен контролировать автодорогу даже при включенном режиме автопилотирования.
Кроме того, системы полного автопилотирования пока законодательно запрещены во всем мире. Все дело в том существую некоторые вопросы к электронным системам автопилотирования транспортных средств. Например, существует проблема, которая заключается в правильности выбора действий автомобиля в случае экстренной ситуации?
Например, куда поедет автономный автомобиль, в случае если на дорогу выбежал ребенок? Что если электроника принимает решение сделать маневр в сторону тротуара, для того чтобы не допустить гибели ребенка. Но в этот момент на тротуаре идут люди и возможно дети. Как принимать решение автономной системе? И таких ситуаций на дороге может быть множество. Изначально их нужно все предусмотреть и прописать в алгоритмах действий автопилота. Также на законодательном уровне необходимо предусмотреть, кто будет нести ответственность за аварию с автономным автомобилем.
В настоящий момент именно поэтому пока официально ни одна страна в мире не дала разрешение на использование полностью автономных автомобилей на общественных автодорогах. Единственным исключением являются Калифорния и Невада, где на некоторых дорогах власти США разрешили использовать экспериментальный автономный автомобиль Google. Это сделано для тестирования автомобиля на безопасность. К середине 2016 года планируется, что власти США утвердят первые в мире единые правила для автономных автомобилей, которые будут ездить по дорогам в Америки.
Также планируется на законодательном уровне закрепить возможность управления автомобилем компьютерной системой. То есть власти США готовы «роботу» (автопилоту) официально выдавать водительское удостоверение.
Автономные автомобили — уже совсем скоро
Также в настоящий момент компания Ауди разрабатывает автономный автомобиль А9, который возможно будет дебютирован после 2018 года. Эта машина оснащена уникальными автономными технологиями, которые приближают автопромышленность к фантастическому будущему. Эта экспериментальная автономная модель имеет оснащение с высокой степенью автоматизации автономного управления без участия водителя.
Но не только Немецкие автомобильные компании готовятся в великой эре автономных автомобилей.
Так, власти Германии, также в настоящий момент ведут на законодательном уровне подготовку регулирующих документов, которые разрешат официально использование автономных автомобилей, на дорогах страны начиная с 2020 года.
Появятся в ближайшее время серийные автономные автомобили Google?
В ближайшем будущем такие компании как Apple и Google, которые стали успешными на рынке телефонов и электронных технологий, могут войти в новый для себя бизнес в качестве автопроизводителей. Многие из вас уже, наверное, слышали о разрабатываемом автономном автомобиле Google Car. Интересно на каком этапе в настоящий момент находятся разработки этого автомобиля? Что можно будет делать в автономном автомобиле? Можно ли будет в автономном автомобиле управлять машиной самостоятельно? С какой скоростью будет ездить автономные автомобили? Есть риск угрозы автономным автомобилям со стороны хакеров?
На эти и другие вопросы, наше интернет-издание 1gai.ru предлагает ответы ниже.
Какие в настоящий момент разрабатываются автономные автомобили?
В настоящий момент ряд автомобильных компаний ведут активную разработку автомобилей с полным автопилотом. Большая часть разрабатываемых транспортных средств оснащается электрическими двигателями, которые питаются от аккумуляторов. Например компания Ауди ведет разработку автономного автомобиля под рабочим названием А9.
Также компания Мерседес вложила миллионы долларов для разработки инновационного автомобиля будущего, который будет иметь полностью автономный автопилот. Разработка ведется на базе футуристического концепт-кара, который был представлен на нескольких автосалонах в 2015 году. Концепция получила имя Mercedes-Benz F 015.
Какая роль отведена водителю в автономном автомобиле?
С самого начала автопромышленности на законодательном уровне принято, что водитель должен находиться на переднем сиденье, держа руки на руле. К примеру, с 1968 года во всей Европе, согласно законодательству, во время движения автомобиля водитель обязан держать обе руки на рулевом колесе, за исключением движений требующих переключения передач.
Но с появлением автономных автомобилей все в скором времени измениться. К примеру, водитель может на законных основаниях сесть на заднее сиденье, включив автопилот. Также водитель, садясь на передние сиденье, сможет не держать рулевое колесо, а например, читать газету во время движения.
Также водитель вместе с пассажирами сможет смотреть телевизор или даже поиграть в видео игры.
Как работают автономные автомобили?
Автономные автомобили имеют в своем оснащении различные датчики, камеры и сенсоры. Например, существуют ультразвуковые и инфракрасные датчики. Некоторые модели автомобилей даже имеют лазерные датчики.
Используя датчики и камеры, машина сканирует каждые несколько миллисекунд окружающее пространство. Система сканирования окружающей среды способна определять вокруг себя ландшафт и другие транспортные средства не только на шоссе, но и в крупном мегаполисе.
Пока что на данный момент автономные автомобили не умеют безопасно без участия водителя обгонять другие транспортные средства. Но технологии продолжают совершенствоваться, и по прогнозам аналитиков к 2020 году эта инновация будет доведена до совершенства.
Что необходимо автономному автомобилю дополнительно помимо камер и датчиков?
Для того чтобы автономный автомобиль мог полноценно самостоятельно передвигаться по любой местности, необходимо чтобы в бортовой компьютер машины была заложена подробная карта местности, со всеми развязками, светофорами и любой другой инфраструктурой. Датчики, сенсоры и камеры в итоге синхронизируются с GPS картой. Эти карты должны быть очень точными. Погрешность карт не должна составлять более 20-50 сантиметров.
Насколько точно работают камеры в автомобиле с автопилотом?
К сожалению, современные технологии на сегодняшний момент не позволяют автономному автомобилю путешествовать по дороге в любое время суток. Несмотря на качественные видео камеры, применяющиеся на автономных автомобилях, все еще существует проблема, связанная с низким качеством восприятия видео картинки в вечернее время. Дело в том, что когда солнце находится на горизонте, камера не может со 100 процентной точностью определять цвет горящего светофора.
В настоящий момент в автопромышленности, это пока главная проблема для создания полноценного автомобиля с автопилотом.
Причина этой проблемы в том, что современные оптические системы и матрицы пока не могут справиться с яркостью некоторых объектов. Та же проблема существует и у человеческого глаза. Например, в сумерки камера может не правильно определить, цвет исходящий от светофора, а при очень ярком свете система может полностью не видеть свечение светофора.
Смогут ли автономные автомобили передвигаться в снегопад?
К сожалению, пока нет такой технологии, которая бы позволила использовать автономный автомобиль во время снегопада. Дело в том, что существующие в наше время датчики на автономном автомобиле, определяют снег, как препятствие. Поэтому когда идет снег, машина будет стоять на месте.
Но это не единственная проблема автономных автомобилей для зимней эксплуатации. Например, такие системы как ABS, ESP не смогут синхронно работать с автопилотом. Давайте представим, что автономный автомобиль занесло на дороге и электронные системы безопасности, чтобы выровнять автомобиль включают свою электронику. В этом случае часто необходим резкий маневр на дороге. Но система автопилота не даст это сделать, поскольку электроника не допустит изменение курса движения.
Как быстро может ездить автономный автомобиль?
Во многих странах мира пришли к единому мнению, что в будущем автономные автомобили должны будут передвигаться по дороге не быстрее 130 км/час.
Уменьшится ли количество аварий, когда на дороге станет больше автономных автомобилей?
Дело в том, что электроника не сможет ошибиться как человек. Например, в любом случае количество аварий из-за несоблюдения дистанции станет меньше. К тому же компьютер при необходимости экстренного торможения срабатывает быстрее, чем реагирует человек.
Но есть одно но. Это не совершенная система поддержания дистанции. В настоящий момент автономные системы поддержания дистанции могут работать только при соблюдении не очень большой дистанции до другого автомобиля. Из-за этого при сокращении дистанции автономный автомобиль снижает скорость не очень плавно. В итоге это может сказаться на образовании инерционных пробок из-за резкого снижения скорости на шоссе.
Все дело в том, что система автоматического торможения срабатывает только тогда, когда впереди идущий автомобиль попадает в зону видимости сенсоров, которые пока не отличаются дальностью сканирования пространства. Именно поэтому автономные автомобили пока не могут плавно снижать скорость, как это делают обычные водители.
Другое дело, когда касается плотного трафика на дороге. Например, в пробке автономный автомобиль незаменим, поскольку быстрее реагирует на начало движения потока, что соответственно способствует более быстрому началу движения автомобиля.
Кто несет ответственность, если виновником аварии признан автономный автомобиль?
Согласно действующему законодательству во всем мире, ответственность на дороге несет водитель, нарушивший правила дорожного движения. Что касаемо автономного автомобиля, то пока не существуют законов регулирующих положение этих транспортных средств. Но, скорее всего виновником аварии автономного автомобиля будет признаваться владелец машины. Возможно в будущем, когда действительно автомобили станут полностью автономными, на законодательном уровне будет что-то пересмотрено.
Насколько безопасен автомобиль с автопилотом?
Пока об этом сложно говорить. Пока испытания автономных автомобилей не пройдены до конца. Поэтому говорить об их безопасности пока рано. Особенно неизвестно насколько автономный автомобиль безопасен для пешеходов детского возраста.
Особенно неизвестно насколько автономный автомобиль опасен для других участников дорожного движения.
Например, неизвестно насколько автономный автомобиль безопасен для пешеходов.
Облегчает ли автономная машина поиск парковочного пространства?
Некоторые серийные автомобили уже сегодня могут помогать водителю искать парковочное пространство. Так что можно считать, что эта технология уже полностью протестирована.
Смогут ли автономные автомобили самостоятельно парковаться?
Конечно да. Такие технологии уже существуют. Причем на серийных автомобилях.
Единственное, что автопроизводители должны придумать, как обозначать на дороге автономные автомобили, для того чтобы водители других автомобилей знали, что перед ним движется или паркуется автомобиль с автопилотом. Предлагается, что автономные автомобили будут обозначаться специальной сигнальной лампой.
Может ли хакер взять под контроль автомобиль с автопилотом?
Это зависит от безопасности используемого программного обеспечения в машине. В настоящий момент нет сведений о том, что автономные автомобили имеют уязвимости. Дело в том, что для того чтобы взломать автомобиль необходимо, чтобы он был подключен к какой-нибудь внешней коммуникационной сети. Но автономные автомобили не имеют такого подключения.
Так что говорить о том, что хакеры могут взломать машину с системой автопилотирования преждевременно. Вполне возможно, что в будущем обнаружатся уязвимости.
Какое текущее состояние автономных технологий в автопромышленности?
Первый этап бурного развития автономных электронных систем уже завершился. К примеру, в настоящий момент во многих автомобилях появился адаптивный круиз-контроль, который может не только поддерживать определенную скорость движения, но и держать дистанцию до другого автомобиля и снижать автоматически скорость машины, чтобы предотвратить столкновение.
Также активно применяется новая система проезда перекрёстков, система предупреждения съезда с полосы, система мониторинга слепых зон, система контроля при движении в полосе и т.д. и т.п.
На многих современных автомобиля уже появились полуавтоматические автономные системы управления, которые относятся ко второму этапу развития автономных технологий в автопромышленности. К примеру, на Мерседес С-класс или новом поколении Е-класса. Тем не менее, при движении машины контроль по-прежнему пока осуществляет водитель.
На некоторых автомобилях появилась расширенная система автономного управления (третье поколение развития систем автопилота), которая может без участия водителя автоматически управлять машиной, но при сбоях или опасности предупредит водителя, для того чтобы он взял управление на себя.
Совсем скоро начнется четвёртый этап развития автономных автомобилей в автопромышленности. В ближайшие годы автомобильные компании выпустят первые в истории серийные автомобили, которые будут способны полностью обходиться без водителя, но, тем не менее, присутствие водителя на водительском кресле будет все-таки обязательно на случай экстренной ситуации.
Смогут ли автономные автомобили передвигаться полностью без водителя?
Полный автопилот в автомобиле станет высшей ступенью развития автономных автомобильных систем. При этом этапе развития в будущем водитель машины полностью станет не нужен. Как автопромышленность будет двигаться в этом направлении уже известно. Все зависит от развития технологий искусственного разума. Но в любом случае это не вопрос ближайшего будущего. Если такие автомобили и появятся, то это в далеком будущем. Ведь для таких типов автомобилей необходимо самообучающееся программное обеспечение с искусственным интеллектом.
Где официально разрешено законно движение автономных автомобилей?
Пока что официально на законодательном уровне разрешено движение автономных автомобилей только в штатах Калифорния, Флорида, Невада и Техас (США). Движение автономного автомобиля разрешено только при наличии специального разрешения. Первую в истории лицензию на право эксплуатации автономного автомобиля на общественных автодорогах в 2012 году получил автомобиль Google.
В Германии также есть специальное разрешение на эксплуатацию и тестирование автономного автомобиля Ауди А9 по определенному участку дороги.
В 2016 году протяженность этого участка составляет 1,6 километра. С 2017 года власти Германии расширят территорию тестирования автономного автомобиля.
Также в Гетеборге, Швеция официально разрешено проводить тестирование автономных автомобилей при получении специального разрешения. В настоящий момент, компания Вольво, получив лицензию на право эксплуатации автономных автомобилей, тестирует свои собственные технологии автопилота.
Разрабатываются только легковые автономные транспортные средства?
Нет. Помимо легковых автомобилей с автопилотом ведутся разработки и грузовых автономных транспортных средств. В настоящий момент компания Мерседес ведет разработку и тестирование первого в мире автономного грузового автомобиля «»Future Truck 2025».
Когда появилась идея автономных автомобилей?
Многие ошибочно полагают, что автономные автомобили это технологии 21 века, которые впервые в истории автопромышленности пришли в наш мир. На самом деле это не так.
Например, еще в 1994 году компания Мерседес совестно с Мюнхенским университетом на базе седана S-класса Е500 проводила разработку автономного автомобиля «VaMP». Машина во время теста прошла более 1000 км. Правда из-за ошибок в программном обеспечении и несовершенства сенсоров автомобиль идеально без аварийных ситуаций проехал автономно только 158 км.
Кто подтолкнул развитие автономных автомобилей в 21 веке?
В 2004 году Министерство обороны США начала тестирование в пустыне разработанных автономных автомобилей. Параллельно с этим ряд ведущих университетов начали исследование в этой области. Так в Берлине разработали экспериментальный автономный автомобиль (на фото). Именно с этого момента автономные технологии в автопромышленности начали развиваться бешеными темпами.
Какие компании имеют перспективу стать ведущими по производству автономных автомобилей?
В настоящий момент ряд известных во всем мире автомобильных компаний активно развивают и разрабатывают автономные модели автомобилей. Пока сказать сложно, какая компания имеет больше перспектив стать лидером по производству автомобилей с автопилотом. Но есть вероятность, что ей может стать компания Tesla и будущее автомобильное подразделение компании Apple, которая совместно с Tesla ведет разработки автомобилей будущего.
Насколько автономная технология сложна и можно ли будет в будущем оснастить ею традиционные подержанные автомобили?
Конечно да. В будущем на рынке появятся компании, которые будут заниматься модернизаций обычных автомобилей, оснащая их системами автопилотирования. Например, недавно 26-летний изобретатель Джордж Хотц, самостоятельно переделал старый автомобиль Акура, из которого смог сделать полноценное автономное транспортное средство.
Что дальше?
Автономные автомобили это неизбежность и фактически уже реальность. Так Министерство транспорта США постановило, что согласно законодательству компьютер может быть признан водителем. Это уже о многом говорит.
Также компания Volkswagen полностью разработала VW Golf VII, который оснащен полноценной автономной системой управления. Планируется, что эта модель выйдет на рынок уже в 2019 году.
То есть это говорит о том, что технология полноценного автопилота для автопромышленности уже полностью разработана. Например, VW Golf VII с автопилотом может автоматически управлять машиной на скорости не более 130 км/ч.
Начиная с 2020 года авторынок начнет массово пополняться автономными автомобилями различных марок.
По прогнозам аналитиков и Министерства транспорта США к 2030 году четверть автомобилей на дорогах всего мира будут иметь автономную систему управления без участия водителя. То есть в 2030 году в мире будет уже немало машин, в которых присутствие водителя на переднем сиденье будет не обязательно.
Автономные системы будущего. Классификация, особенности и требования / Habr
Автономные системы известны сегодня во многом благодаря последним веяниям из автомобильной промышленности. На самом деле, автоматизированные системы различной степени автономности являются составной частью будущих разработок и планов развития многих областей деятельности. В представленной статье авторов Werner Damm и Ralf Kalman из журнала «Informatik-Spektrum» издание 5/2017 приведены различные отраслевые нормы и стандарты, а также дается характеристика функциональных возможностей и требований к методам, процессам и инструментам для разработки соответствующего программного обеспечения.
Чем выгодна автономность?
Насколько техническая система должна и насколько может быть автономной?
На сегодняшний день кажется, что не существует границ для реализации все более и более совершенных автономных систем. Мы стоим на пороге внедрения на рынок технологий, которые самостоятельно выстраивают сложные отношения окружающего мира на основании предоставленных данных, автоматической идентификации объектов и информации с сенсоров различного уровня. Все это используется, чтобы получить точное цифровое представление действительности для реализации поставленной задачи. Вводятся системы, способные осуществлять анализ возможного дальнейшего развития событий окружающей действительности, который выходит далеко за пределы человеческих аналитических способностей. Реализуются системы, которые самостоятельно планируют и реализуют задачи, не требуя при этом никакой поддержки со стороны. Эти системы наделяются когнитивными способностями человека, релевантными в контексте поставленной задачи, которые позволяют им действовать полностью автономно.
Недавно опубликованный отчет правительства Германии о стратегии в сфере высоких технологий показывает множество возможностей применения автономных систем. Среди них указываются все виды „Smart Systems“, такие как Smart Mobility, Smart Health, Smart Production, Smart Energy, интеллект которых реализуется на основе вышеперечисленных возможностей. Они способны в реальном времени создавать цифровую картину мира, обрабатывая данные со множества источников информации, и организовывать совместную работу миллионов подсистем таким образом, чтобы обеспечить успешное выполнение поставленных целей, таких, например, как оптимизация использования ресурсов. Выгода от этого может быть применена во многих сферах общественной жизни: здравоохранения и транспорта, энергопотребления, продуктивности и качества продуктов, предупреждение стихийных бедствий и столкновений различных транспортных средств. Philips, например, при использовании специальных носимых датчиков для послеоперационного наблюдения пациентов ожидает сокращение послеоперационных остановок сердца на 86%, а, через „умное“ отслеживание критических параметров здоровья в амбулаторном лечении, сокращение его стоимости на 34%.
Системы автоматизированного управления существуют уже довольно много лет. Автоматизация позволяет эффективно использовать технику без необходимости ручного вмешательства. Типичные задачи автоматизированного управления и настройки оборудования представляются в виде цепей управления, для которых создаются математические модели и которые реализуются в виде электронных приборов и программного обеспечения.
Современное развитие кибер-физических систем выходит далеко за эти пределы. Объединение IT со встроенными системами управления и динамическое взаимодействие друг с другом обеспечивают их совместную работу через гетерогенные интерфейсы данных. Также, как и при автоматизации в 80-х годах, автономное производство обещает повышение эффективности, продуктивности и качества.
Разработки такого рода проводятся во многих областях применения технических систем. Хотя их прикладные сценарии отличаются, в сфере программного обеспечения могут быть выявлены общие проблемы и описаны обобщенные методы их решения. Примеры таких методов будут представлены в последней части данной статьи. Особый интерес при этом вызывает применение самообучающихся систем. С ними потенциальные возможности автономии кажутся безграничными, потому что появляется возможность распознавать изначально неизвестные, влияющие на работу системы, артефакты окружающего мира и изучать относящиеся к ним динамические модели. Таким образом, открываются новые, ранее не предполагаемые возможности применения техники.
Потенциальная рыночная стоимость технологий, возникающих на основе этих разработок, оценивается в сотни миллиардов USD. В частности, исследование проекта Евросоюза Platforms4CPS приводит следующие данные:
- К 2035 году автономные автомобили будут составлять 10% всех продаж. Это соответствует примерно 12 миллионам штук и объему рынка в 39 млрд. USD.
- Рынок управления авиаперелетами вырастет, согласно оценке, с 50,01 миллиарда USD в 2016 до 97,3 млрд. USD в 2022. При этом средний уровень годового роста будет составлять 11,73%.
- Мировой рынок роботизированной авиации ожидает среднегодовой рост на уровне 17,7% в течении следующего десятилетия, так что в 2025 году его стоимость достигнет 7,9 млрд. USD (по данным „Markets and Markets“).
- Объем рынка дронов оценивается в 13,22 млрд. USD и к 2022 должен достичь 28,27 млрд. при ежегодном росте в размере 13,51%.
- Рынок беспилотных автомобилей оценивается от 437,57 млн. USD в 2016 и до 861,37 млрд. в 2021 при годовом росте 14,51%.
- Объем рынка автономных подводных аппаратов возрастет с 2,29 млрд. USD в 2015 до 4,00 млрд. в 2020 при оценочном годовом росте 11,90%.
- Рынок промышленного интернета вещей (IIoT) ожидает рост с 110 млрд. USD в 2020 до 123 млрд. в 2021.
- Рынок технологий для носимых гаджетов имеет объем 28,7 млрд. USD. „Gartner“ прогнозирует, что этот рынок будет ежегодно расти в среднем на 17,9% между 2015 и 2017. При этом наиболее растущим является сегмент наручных мобильных гаджетов с годовым приростом 30%.
- Рынок microgrids был оценен в 16,58 млрд. USD в 2015. В 2022 „Markets and Markets“ ожидает его рост до 38,99 млрд. USD при годовом росте на уровне 12,45%.
Благодаря развитию технологий, на современном рынке появляются новые виды продуктов и услуг с высоким уровнем автоматизации. В связи с этим встает вопрос о том, в каких областях такие разработки действительно имеют смысл, и какое воздействие они оказывают на общество.
В условиях постоянно повышающегося уровня автономности однозначно будет меняться и качество взаимодействия человека и техники. На сегодняшний день человек выступает не только как конечный пользователь, но и, во многих случаях, как часть системы управления (human-in-the-Loop). Автономизация же создает тренд, устанавливающий взаимодействие человека и техники на более высокий уровень абстракции. Автономная система дает человеку возможность ознакомиться с частью „своего“ цифрового видения мира с помощью подходящих абстракций, таких как, например, технологии виртуальной реальности, релевантные для решения конкретной проблемы в данный момент времени. И наоборот, человек может с легкостью воздействовать на сложные процессы внутри системы через интуитивно понятные человеко-машинные интерфейсы. Эта коммуникация, сопровождающаяся повышающимся уровнем абстракции, требует, в свою очередь, определенного уровня квалификации и обучения. Одновременно с этим исчезнут за ненадобностью рабочие места для низкоквалифицированного персонала.
Постоянное использование большого количества источников данных значительно повысит опасность их незащищенности. Архитектура сетевых распределенных систем будет устанавливать экстремально высокие требования к своей защите, чтобы избежать катастрофического воздействия возможных кибератак, направленных на отключение отдельных составных компонентов.
При растущей автономности также возникает вопрос, какими ценностями должен обладать, лежащий в основе, процесс принятия решений, и соответствуют ли они нашим собственным. На основании этого Европейский парламент в своей резолюции от 16 февраля 2017 постановил:
- использовать принцип транспарентности, который подразумевает, что всегда должно быть возможно установить принципы и аргументацию, стоящие за каждым принятым с помощью искусственного интеллекта решением, которое может оказать существенное влияние на человеческую жизнь;
- всегда должно быть возможно представить вычислительные алгоритмы системы, использующей искусственный интеллект, в понятной человеку форме;
- прогрессивные роботы должны быть оснащены так называемым „черным ящиком“, записывающим данные о каждой совершенной машиной транзакцией, включая логику, которая внесла вклад в принятие того или иного решения.
Наконец, из-за предстоящего ввода на рынок автономных беспилотных автомобилей, необходимо заново пересмотреть законы об ответственности за возникающие правонарушения.
Эти темы выходят, таким образом, за рамки своей чисто профессиональной сферы. Каким образом нужно проектировать автономные системы, чтобы они приносили не только экономическую выгоду, но и были бы позитивно восприняты обществом? Эти проблемы должны стать предметом изучения в информатике. Настало время заново переосмыслить существующие процессы и методики проектирования, в которые на постоянной основе должна быть включена оценка социального воздействие разрабатываемых автономных систем.
Классы автономности в различных отраслях
Самым известным примером являются автономные транспортные средства в автомобильной промышленности. Многие производители объявили о выпуске на рынок соответствующих автомобилей в следующие 3-4 года. Однако, имеющиеся уже на сегодняшний день, вспомогательные системы позволяют реализовать удивительные вещи. Несмотря на это, путь от частично автоматизированного вождения (некоторые производители говорят в этом случае также о „пилотируемом“ вождении) до полностью автономного еще очень далек. При частично автоматизированном (соответствует 2-му уровню автоматизации по SAE) главная ответственность лежит на человеке, и он обязан иметь возможность самостоятельно вмешиваться в процесс в кратчайшие сроки. Кроме этого, возможность применения таких систем ограничена строго нормированной окружающей обстановкой (например, езда по автотрассе). На уровне высоко автоматизированного вождения (уровень автоматизации 3 по SAE) водителю разрешается уделять свое внимание другим вещам, то есть программное обеспечение гарантирует полную безопасность вождения либо, в случае возникновения какой-то ошибки, переводит систему в безопасное состояние, например, остановив транспортное средство на обочине. Полностью автоматизированные автомобили (уровень автоматизации 4 по SAE), которые справляются со своей задачей абсолютно без помощи водителя, представляют высшую ступень автономности, при этом им не требуется никаких указаний относительно скорости движения или особенностей окружающей обстановки.
Существенное влияние на развитие этой отрасли оказывает, в первую очередь, не желание обычных людей передать управление своим автомобилем в другие руки, а потребности новых транспортных компаний в соответствующих услугах, открывающих новые сегменты рынка или предлагающих более эффективный и быстрый общественный транспорт внутри населенных пунктов. В грузовых перевозках автоматизация позволяет разгрузить водителя, который сможет посвятить освободившееся время другим задачам и будет, таким образом, продуктивнее работать.
В железнодорожном и, в особенности, в подземном транспорте некоторые процессы уже автоматизированы. Здесь действует упрощенная модель, так как система работает на гомогенном ландшафте, где отсутствует пересечение транспортных маршрутов и многие пути изолированы друг от друга. С другой стороны, к этому добавляется вышестоящая система управления и координации процессов, из-за чего Международный Союз Общественного Транспорта (UITP) включил в свою классификацию вышестоящую систему наблюдения и контроля. Система автоматизированных поездов содержит следующие три компонента: обеспечение безопасности, управление составами и наблюдение за поездами. Безопасность контролируется посредством соблюдения дистанции между поездами, а также управления их скоростью. Управление обеспечивает движение поезда согласно расписанию и регулирует, например, открытие и закрытие дверей вагонов. Наблюдение за поездами контролирует, в свою очередь, все маршруты и всю инфраструктуру и передает соответствующую информацию в центр управления.
Такая система может быть наиболее просто реализована в метро на основании однородности транспортных средств и изолированности инфраструктуры. Однако, соответствующие концепты могут быть перенесены и в другие области железнодорожного транспорта, вплоть до больших сортировочных станций. При этом все же возникают проблемы при наблюдении и контроле за движением международного транспорта или из-за сложности окружающей обстановки, как например, движение пригородных поездов на вокзалах различного типа. Двигателем, шагающей вперед автоматизации железнодорожного транспорта, является высокая экономическая выгода предлагаемых решений, достигаемая, например, экономией энергии при согласованных процессах ускорения и торможения в одной транспортной сети.
В воздушном транспорте автоматизированное управление полетами применяется уже давно. Для беспилотников, применяемых, в основном, в военных целях, был повышен уровень автономности в части самостоятельного планирования задач и управления миссиями. Десять уровней автономности ALFUS (Autonomy Levels for Unmanned Systems) используют при этом три проекции для характеристики способностей системы: независимость от человеческого вмешательства, сложность задач и сложность окружающей обстановки. Вместе они характеризуют способности автономной работы. При поиске технологических решений для высшей степени автономности добавляются также такие темы, как поведение в группе, адаптивная коммуникация между аппаратами и самообучение, которые, пока еще, не коснулись остальных упомянутых выше таксономий.
В производстве автоматизированные процессы являются стандартными с введением в 80-х годах программируемых логических контроллеров (ПЛК). Такие процессы, однако, обладают малой гибкостью и ориентированы на массовое производство. Индивидуализированное производство или, обусловленные рынком, изменения в продуктовом портфолио приводят к дорогостоящей перенастройке производственных линий и переоснащению оборудованием. В процессе развития цифровых технологий и на основе концепции Индустрии 4.0 индивидуализированное производство стремится достичь такого же уровня эффективности и качества, как при массовом производстве. При этом оно должно автоматически приспосабливаться к изменяющимся условиям и новым производственным целям. Исследовательское общество Фрауенхофер предлагает 5 эволюционных ступеней, сопровождающих это развитие. В первую очередь, требуется обеспечить сбор и обработку производственных данных. Это будет являться основой для вспомогательных систем, оказывающих помощь в работе и при принятии решений. На третьей стадии объединение производственных этапов в единую сеть обмена данными и их интеграция друг с другом обеспечивают необходимые условия для оптимизации всей системы в целом. Для повышения эластичности производства на четвертой стадии от системы требуются способности к трансформации и реконфигурации. И на последнем пятом уровне производственная система должна уметь саму себя организовывать. На сегодняшний день производственные системы обосновались на уровнях с первого (сбор производственных данных) по третий (производство, объединенное сетью общих данных, как например, при производстве автомобилей). Чтобы перейти на следующую стадию, требуется, как правило, полная реструктуризация всей производственной архитектуры, что, соответственно, требует больших затрат.
Уровни автономности всех перечисленных областей применения приведены еще раз в таблице, при этом сделана попытка представить похожие степени автономности из различных доменов на одном уровне.
| Уровень автономности | Автотранспорт | Ж/д-транспорт | Авиация | Производство |
|---|---|---|---|---|
| 0 | Нет автоматизации | „Едет как видит“ | Сбор и обработка данных | |
| 1 | Вспомогательные системы | Вспомогательные системы | ||
| 2 | Частичная автоматизация | Автоматизированные системы безопасности при наличии машиниста | Ограниченное управление | Работа в единой сети и интеграция |
| 3 | Условная автоматизация | Автоматизированные системы безопасности и эксплуатации при наличии машиниста | Диагностика состояния в реальном времени | Децентрализация, адаптация и трансформация |
| 4 | Высокая автоматизация | Беспилотная эксплуатация | Приспосабливаемость к ошибкам, поломкам и изменениям условий полета | |
| 5 | Полная автоматизация (автономность) | Беспилотная эксплуатация без контроля со стороны человека | Самостоятельное изменение маршрута | Самоорганизация и автономность |
| 6 | Автономное поведение в группе при любых внешних условиях |
На основе приведенных примеров уже можно распознать много общего в классификациях по уровням и целям автономности. Обобщенная классификация, которая бы успешно объединила воедино различные аспекты, была разработана и опубликована SafeTRANS в рамках технического планирования реализации высокоавтоматизированных систем. В ней существенные аспекты автоматизации разделены на четыре класса:
- Функциональные автоматизированные системы могут автономно выполнять ограниченные, четко сформулированные задачи, как например, автоматическая парковка, приземление или полностью автоматизированное производство одного определенного продукта. Эти системы не могут обучаться в процессе эксплуатации; кооперация с другими системами ограничена лишь обменом контекстной информации, т.е. отсутствует какая-либо совместная работа.
- Системы, ориентированные на выполнение миссий, могут решать незапланированную последовательность знакомых и выполнимых задач независимо от имеющейся ситуации. Это может быть, например, автономная езда на машине по трассе или работа одной линии метро. При реализации этого могут играть роль различные критерии оптимизации, как например, минимизация времени или ресурсных затрат. Расчеты для планирования и оптимизации производятся системой динамически в момент выполнения задачи. Эти системы также не могут обучаться в процессе работы; кооперация с другими системами ограничена обменом информации о контексте задачи и о самой системе.
- Коллаборативными системами являются такие системы как роботы, группы из транспортных средств или летательных дронов, которые двигаются в определенном порядке или кооперируются друг с другом во избежание столкновений. В целях выполнения своей миссии, такие системы в состоянии взаимодействовать с другими системами и людьми, а также динамически согласовывать друг с другом свое восприятие, интерпретацию, цели, планы и действия. Эти системы обмениваются со своими партнерами релевантной информацией, но, все же, не являются обучаемыми.
- Самодостаточные (аутопоэзические) системы – это системы, которые в состоянии самостоятельно развивать свои восприятие, интерпретацию, действия и способности совместной работы, а также обмениваться этим с другими системами (включая воспроизведение изученного поведения). Эти системы демонстрируют таким образом человекоподобное поведение и, на сегодняшний день, все еще не реализованы на практике. Способность к бесконтрольному обучению является основной характеристикой этого класса систем.
Существенным элементом представленной классификации является способность к обучаемости у аутопоезических систем. На сегодняшний день кибер-физические системы не могут быть наделены такой способностью, так как не существует соответствующих нормативных требований, обеспечивающих их уверенную и безопасную работу, потому что невозможно доказать предсказуемость и надежность системы после ее самопроизвольного изменения. Недавние технологические прорывы в области Deep Learning и высокие результаты при распознавании изображений и выявлении закономерностей показывают, все-таки, что разработки в этом направлении и возможности машинного обучения развиваются очень быстрым темпом. Однако, на этом пути все еще имеется множество препятствий и требуются дополнительные исследования: нейронные сети могут развивать себя также в непредусмотренном направлении или извлекать закономерности из данных, которые не должны были бы быть распознаны. Актуальные исследования показывают, например, что процесс автоматического обучения изучает также этически нежелательные исторические данные, такие как половые предпочтения или расистское поведение. Таким образом, необходимо осуществлять соответствующий контроль по этическим и правовым нормам. Именно поэтому нейронные сети на сегодняшний день не могут быть изменены после прохождения фазы обучения. Однако, из-за большого количества входных данных и сложности нейронных сетей, проблема неопределенности их поведения все еще остается.
В особенности, в азиатском регионе роль автономных систем все больше рассматривается с позиции их влияния на человека. Они должны помогать людям, упрощая их работу. Человек при этом все же является элементом управления (human-in-the-loop), так что можно говорить в этом случае о кооперативном интеллекте. Примером этому может служить взаимодействие человека и робота при совместном выполнении какой-то задачи. Такие самодостаточные системы будущего осуществляют передачу опыта между машинами и людьми и приспосабливают свое поведение. В это же время появляется возможность для решение этических вопросов. Поведение машин в отношении человека является областью исследований машинной этики. Однако, даже более простые автономные системы требуют интерфейса к человеку. Соответствующие пользовательские интерфейсы обязаны понятно информировать, предоставлять в распоряжение различные службы и информацию и, в идеале, учитывать индивидуальное поведение человека в различных ситуациях.
Требования к автономиям
В этом разделе представлены базовые рекомендации от SafeTRANS, касающиеся безопасности, работоспособности и разработки высоко автономных систем. Главной сложностью для автономной системы при этом является распознавание окружающей действительности.
Сложность процессов окружающего мира делает невыполнимой задачу проведения множественных испытаний, необходимых для допущения автономной системы к эксплуатации. Исходя из этого, рекомендуется реализовать дополнительную систему постоянного наблюдения за системой и обучать ее на основании данных, полученных в результате испытаний в реальных условиях. Схема ниже показывает такой процесс обучения на мета-уровне, при котором система испытывается в реальных условиях, и данные наблюдений после независимой оценки становятся базисом для процесса обучения.
SafeTRANS рекомендует следующие мероприятия для разработки автономных систем:
| Область действий | Мероприятия |
|---|---|
| 1. Модели окружающего мира | 1.1. Разработка общего открытого индустриального стандарта для моделей окружающей среды в разных областях применения, в соответствии с этапом развития и уровнем сложности системы. 1.2. Построение общедоступного процесса и соответствующей инфраструктуры для налаживания виртуального тестирования систем. Для этого необходимы: аккредитованные учреждения; общедоступное тестовое окружение; спецификации тестирования в реальных условия. 1.3. Создание приемлемой для разрешающих органов и общества аргументации, доказывающей безопасность высоко автоматизированных систем и основанной на результатах виртуальной проверки и тестирования в реальных условиях. |
| 2. Обучающее сообщество | 2.1. Построение общедоступного процесса для обучения на основе наблюдений в реальных условиях. Для этого необходимы: независимый аккредитованный Центр Доверия; обязательство со стороны коммерческих организаций добровольно предоставлять уполномоченному Центру Доверия необходимые анонимные данные; передача Центром Доверия результатов анализа обратно в процесс валидации. |
| 3. Архитектура | 3.1. Стандартизация протоколов обмена информацией между объектами и ситуациями в индустрии для обеспечения их взаимодействие друг с другом. 3.2. Стандартизированная функциональная архитектура для автоматизированных систем и их компонентов, которая подтверждает безопасность и обеспечивает минимальную функциональность в упрощенных режимах использования. 3.3. Единообразный, согласованный процесс разработки высоко автоматизированных систем, включая обязательную возможность проведения обновления и апгрейда. 3.4. Индустриальный стандарт сертификации/валидации совместимости обновлений системы с существующей электротехнической архитектурой. 3.5. Четкие стандартизированные уровни деградации систем с гарантированным минимумом функциональности |
| 4. Гарантия взаимной совместимости автономных транспортных средств | 4.1. Международная классификация архитектур высоко автоматизированных систем и их взаимная совместимость. 4.2. Введение сертификатов соответствия для архитектур из вышеназванной классификации, которые выдаются открытой общественной организацией. 4.3. Международный, согласованный процесс выпуска систем следующего поколения |
| 5. Платформа | 5.1. Предоставление платформы с базовыми службами для автономных транспортных средств, находящихся на различных этапах развития. 5.2. Учреждение специальных стандартов для платформ, которые позволяют проводить их независимую сертификацию. 5.3. Предоставление программного модуля, способного показывать актуально воспринимаемое состояние окружающего мира в каждый момент времени, картину возможного развития событий, а также выводить на основе этого рекомендации к действиям |
Краткая история развития беспилотных автомобилей / Habr
Предыстория
В последнее время буквально каждый день выходит новость, так или иначе, связанная с беспилотными автомобилями. Все крупные автоконцерны активно занимаются разработками робомобилей и технологий для них. У многих людей может возникнуть ложное мнение, что история развития беспилотных транспортных средств берет свое начало в XXI веке. Однако мало кто знает, что первые попытки создания полностью автономного автомобиля были предприняты еще в 1980 году. Например, если зайти в архив статей The New York Times, то по запросу «unmanned vehicles», появится большое количество материала 15 летней давности.
Существуют разные данные, когда точно появились первые полностью автономные транспортные средства. Фактом остается то, что изначально все подобные разработки создавались для военных целей. В начале XX века стали вестись первые исследования в области беспилотных летательных аппаратов. Еще 1916 году Арчибальдом Лоу был создан первый дрон — самолет на радиоуправлении. Во время Первой мировой войны уже активно применялись воздушные торпеды и самоходные немецкие мины.
Впрочем, до середины XX века разработки в области беспилотных технологий носили скорее экспериментальный, чем практический характер, и, так или иначе, без непосредственного участия человека ни одна модель не обходилась. Беспилотные автомобили, как и летающие дроны, вначале были обычными прототипами на дистанционном управлении, и лишь постепенно становились автономными.
От научных экспериментов до робомобилей Google
Первые эксперименты по созданию беспилотной машины датируются началом 1960-х годов. В 1961 году студент Стэнфордского университета Джеймс Адамс в рамках своей научной работы создал прототип самоуправляемой тележки, более известной, как «Стэнфордская тележка».
Самая первая модель управлялась посредством передачи сигнала через кабель. Второй прототип Адамс уже сделал радиоуправляемым. В 1970-х годах математик Джон Маккарти усовершенствовал тележку, оснастив ее системой технического зрения, с помощью которого устройство могло частично автономно двигаться, ориентируясь на белую линию. Тележка также имела несколько камер, дальномер и четыре канала для сбора информации. Более того Маккарти были предприняты попытки создания трехмерного картографирования окружающей обстановки.
В последующие годы основные усилия инженеров в основном были направлены на разработку уже полностью автономного, а не дистанционного управляемого транспорта. На начальных этапах наибольших успехов добились ученые из США, Японии и Германии. Так, по утверждениям независимых экспертов, первый полностью автономный автомобиль удалось создать группе немецких исследователей под руководством пионера робототехники Эрнста Дикманса в 1980 году.
По данному проекту Дикмансом было написано несколько научных работ, в которых детально описывается каждая деталь робомобиля. Удивительно, но многие технологии, применяемые более 30 лет назад, по сути, предвосхитили многое из того, что сейчас применяется в современных беспилотниках. Для должной работы своего автомобиля группа немецких ученых применила так называемый фильтр Калмана, параллельные вычислительные механизмы и имитацию саккадического движения глаз. По факту эта система представляла собой модель машинного обучения, способная адекватно оценивать всю окружающую обстановку.
На основе разработок Дикманса с 1987 по 1995 год действовал проект «Прометей», направленный на совершенствование беспилотных автомобилей. В «Прометей» было вложено более $1 млрд., что сделало его самым дорогим в истории проектом по созданию роботизированных автомобилей. В 1994 году автомобиль «VAmP» Mercedes оборудованный технологиями Дикманса на протяжении нескольких часов самостоятельно на скорости до 130 км/ч передвигался по улицам Парижа, поворачивал, обгонял другие автомобили и перестраивался из одной полосы в другую.
В середине 1990-х годов большой толчок к развитию беспилотных автомобилей дал прорыв в области искусственного интеллекта, нейронных сетей и машинного обучения. В 2004 году прошло первое в мире соревнование с участием роботов-автомобилей DARPA Grand Challenge, а еще спустя шесть лет Google протестировала свои первые робомобили. После этого идею создания беспилотных автомобилей подхватило большинство крупных автомобильных компаний. В настоящее время наиболее крупными игроками в этой сфере являются компании General Motors, Volkswagen, Audi, BMW, Volvo, Nissan, Google, Tesla Motors и другие.
Итоги и перспективы
Как можно наблюдать, большинство технологий, применяемых в современных беспилотных автомобилях (радары, лидары, различные датчики, системы спутниковой навигации, бортовые компьютеры, камеры и т.д.), были созданы еще более 20 лет назад. Тогда почему беспилотные автомобили до сих пор плотно не вошли в нашу жизнь? По сути, на этот вопрос ответил тот же Дикманс в одной из своих работ. Он сказал, что для того, чтобы робомобиль научился делать все то, что умеет делать профессиональный водитель, ему нужно научиться обрабатывать огромный объем информации и адекватно ее применять в сложной дорожной обстановке.
Поэтому, как полагают ученые, чем дольше автомобиль будет находиться в движении, тем он в большей мере будет получать и применять необходимую информацию. Например, в автомобиль Google перед поездкой заранее устанавливаются карты с маршрутами. Но что делать, если автомобилю придется передвигаться по незнакомым маршрутам? В компании пока не могут дать четкий ответ на этот вопрос. На помощь этой и не только проблеме пришли технологии больших данных, с помощью которых беспилотный автомобиль будет получать, и передавать большие объемы актуальной информации. Кроме того, для нормального функционирования робомобилей требуется существенно изменить дорожную инфраструктуру.
Несмотря на все сложности в интеграции беспилотных автомобилей в современную жизнь, существует одно большое преимущество, которое оправдывает все усилия и финансовые затраты. По официальным данным, в дорожно-транспортных происшествиях ежегодно погибает 1,3 млн. человек. Если в ближайшее десятилетие, доля беспилотных автомобилей составит хотя бы 10%, ежедневно удастся избежать тысяч смертей.
Как беспилотные автомобили изменят наше будущее и лишат работы миллионы людей
Человеку запретят водить машину
Скажем прямо, люди — паршивые водители. Сама идея дать каждому взрослому человеку возможность управлять двухтонной машиной смерти довольно глупа. Ежегодно автомобили убивают более 1,3 миллиона человек во всём мире.
Компьютеры могут водить гораздо лучше. Во-первых, они не пьют и не отвлекаются на переписку и другие дела за рулём. Во-вторых, множество сенсоров даёт им сверхчеловеческие способности: радары, лазеры, камеры, онлайн-навигация и вычислительная мощь для мгновенного принятия решений.

По данным недавнего исследования , широкое распространение беспилотных автомобилей может сократить количество дорожных аварий на 90%. Это должно спасти тысячи людей.
Факты подтверждают гипотезы. Самоуправляемые машины компании Google проехали более двух миллионов миль , что намного больше, чем средний водитель-человек проезжает в течение жизни. Пока на их счету только одна авария, виновником которой оказался компьютер. Что произойдёт, когда беспилотные автомобили будут повсюду и власти поймут, насколько они безопаснее? Законодатели просто запретят людям водить.
Илон Маск многих разозлил, когда публично допустил такой вариант развития событий. Но его критики не осознают, что возмущение ничего не решает.
Когда-то никто не хотел видеть в машине ремни и подушки безопасности. Теперь же они присутствуют во всех авто, что подтверждает приоритетность общественной безопасности над мнением индивидов.
В конце концов, аварии — это большие убытки. По подсчётам, только в США беспилотные машины позволят cэкономить более 190 миллиардов долларов в год за счёт сокращения материального ущерба. А это очень весомый аргумент в их пользу.
Распространение технологии приведёт к массовой слежке
Если ввести запрос «аварии» в поиске YouTube, то сервис отобразит тысячи роликов с ужасными ДТП и близкими к ним ситуациями. Такое количество записей обусловлено популярностью видеорегистраторов, которые помогают людям защищать права в коррумпированных странах. То есть весь незаметный ранее хаос дорог выносится на всеобщее обозрение.
Появление камерофонов пролило свет на другой важный феномен — полицейский беспредел.
Недавно видео с жестоким поведением полиции по отношению к афроамериканцам вызвало повышенное внимание медиа к проблеме, которую раньше не замечали. Это привело к национальным протестам. Хотя такая жестокость присутствовала давно, камеры изменили осведомлённость о ней.
Беспилотные машины — это камеры на стероидах.
С одной стороны, ошеломляющее количество собранных данных может значительно повысить общественную безопасность. Самоуправляемые автомобили смогут обнаруживать препятствия, аварии, потенциальные угрозы и будут информировать о них нужные службы. А программное обеспечение — вычислять преступления с помощью специальных алгоритмов в режиме реального времени и сообщать о них властям.
С другой стороны, такая постоянная слежка приближает нас к тоталитарному обществу. К примеру, подключённые к интернету беспилотные авто смогут регулярно отслеживать координаты пассажиров. А технология распознавания лиц позволит сети таких машин засекать пешеходов и следить за ними.
Только представьте, какие дебаты вокруг приватности и безопасности вспыхнут в мире, который и так разгорячён откровениями Сноудена!
Понятие «личный автомобиль» перестанет существовать
Почти каждый технологический гигант, включая Google, Baidu и Uber, работает над собственной версией беспилотного авто. Вероятнее всего, эти компании запустят бизнес, работающий по той же модели, что и автономные райдшеринг-сервисы.
Это, примерно, как Uber без водителя. Самоуправляемая машина приезжает по запросу клиента и доставляет его в место назначения, а затем отправляется за новыми пассажирами.
Помимо удобства, такая система сможет предложить низкую стоимость проезда. Для этого большинство перечисленных компаний разрабатывает электрические авто.
Экономия на бензине и водителях может сделать услуги сервисов аля Uber без водителя более дешёвыми, чем проезд в публичном транспорте.
Мы получаем все преимущества наличия своего автомобиля, при этом меньше платим и перестаём волноваться о поддержке машины и местах для парковки. Если беспилотные автомобили станут такими дешёвыми и удобными, идея личного авто окажется бессмысленной.
Люди обрадуются этим переменам, если учесть, что автомобиль имеет очень низкий КПД. Среднестатистический автовладелец тратит на пользование машиной лишь 4% своего времени. Это же расточительство, учитывая, что на содержание авто уходят просто гигансткие суммы. В то же время автопилот оптимизирует транспортную систему, убрав до 90% лишних машин с дорог.
Исчезнут светофоры и пробки на дорогах
Не считая очевидных выгод для экологии, меньшее количество автомобилей на дорогах — первый шаг к устранению пробок.
В 2008 году команда исследователей показала, как дорожные заторы могут возникать из ниоткуда. Учёные запустили 22 автомобиля на зацикленной дорожной полосе длиной 230 метров на скорости 48 км/ч. Через небольшой промежуток времени образовалась пробка.
Этот феномен называют волной трафика. Он возникает в результате снижения скорости одним из водителей в очереди машин и вызывает цепную реакцию.
Остроумно смонтированное видео ниже показывает, как мириады автомобилей неправдоподобно легко избегают столкновений на перекрёстке. Человек не может так водить машину. Но в мире, где автомобили обмениваются данными на огромных скоростях, передовые системы управления трафиком могут сделать такое движение транспорта реальным.
Подобные системы сделают ненужными и светофоры. Это ещё одна перемена к лучшему, поскольку этой технологии уже 150 лет. Сейчас она способна только грубо координировать трафик.
Плохие новости: беспилотные автомобили лишат работы миллионы людей
На этом фото сотрудник полиции оштрафовывает беспилотный автомобиль Google за слишком медленное вождение.
 фото Zandr Milewski
фото Zandr MilewskiЭта картинка — большая метафора нашему автоматизированному будущему. В мире без водителей, парковок и светофоров для дорожной полиции останется не так уж много работы. Мысль об отсутствии штрафов звучит привлекательно, но не так привлекательно для людей, которые лишатся рабочих мест. Подумайте о сотрудниках служб такси и общественного транспорта, а также о водителях-дальнобойщиках.
Деньги — это решающий фактор для общественных перемен. Беспилотным автомобилям не нужно платить зарплату. Они могут работать 24 часа, семь дней в неделю. Используя их, работодатель может не думать о проблемах найма и менеджмента сотрудников. Всё это огромная экономия для транспортных предприятий, которой они не станут пренебрегать.
… и трансформируют экономику, к которой мы привыкли
Внедрение беспилотных авто — часть масштабного феномена под названием «автоматизация». В результате него искусственный интеллект, робототехника и другие технологии выполняют работу вместо людей. Транспортная сфера — только первая жертва, за которой последуют другие.
В автоматизации как таковой нет ничего плохого. Этот процесс длится веками. История знает много профессий, исчезнувших благодаря прогрессу. Вот и будущие поколения будут думать о водителях так же, как мы о лифтёрах и городских глашатаях.
Но сегодня на пути самоуправляемых машин всё ещё много преград. Их нужно подготовить для работы в разных погодных условиях, защитить от хакеров, научить адекватно реагировать на все дорожные ситуации. Тем не менее потенциальные преимущества перевешивают недостатки и трудности, которые ждут впереди.
Если самоуправляемый транспорт принесёт хотя бы десятую часть обещанных благ (будь то спасённые жизни, сэкономленные деньги или улучшенная экология), наш моральный долг — воплотить всё это в жизнь.
Автономные автомобили: последний взгляд назад
 Концепт-кар 1959 года Firebird III корпорации General Motors умел поддерживать постоянную скорость и сохранять полосу движения, следуя изгибам трассы. Технология основывалась на электромагнитных датчиках, которые предполагалось размещать под асфальтом на крупных хайвеях. Выставка Century 21 в Сиэтле, 1962 год, архив Сиэтла.
Концепт-кар 1959 года Firebird III корпорации General Motors умел поддерживать постоянную скорость и сохранять полосу движения, следуя изгибам трассы. Технология основывалась на электромагнитных датчиках, которые предполагалось размещать под асфальтом на крупных хайвеях. Выставка Century 21 в Сиэтле, 1962 год, архив Сиэтла.Согласно отчёту банковского холдинга Morgan Stanley двухлетней давности, 2015 год должен ознаменовать вторую стадию проникновения технологии самоуправляемых автомобилей: ограниченное замещение водителя компьютером. По мнению авторов прогноза, на данном этапе серийные автомобили должны уметь самостоятельно ускоряться, тормозить и поворачивать, справляясь с движением в потоке и прокладывая самостоятельно дорогу, а также брать на себя значительную часть задач при парковке. Но похоже, что аналитики были слишком осторожны — появившийся в конце 2013 года «Мерседес-Бенц» S-класса умеет не только это, но даже самостоятельно обгонять — для этого водителю нужно всего лишь включить поворотник. И сейчас мы находимся в ожидании третьего этапа, на котором серийные автомобили научатся самостоятельно проезжать перекрёстки и пересекать пешеходные переходы. А параллельно идёт развитие полностью автономных прототипов, которые всё ближе и ближе к тому, чтобы превзойти людей в безопасности движения. В этом году они вышли с закрытых полигонов на дороги общего пользования. Вероятно, как раз сейчас мы стоим на пороге будущего, в котором машины будут передвигаться без непосредственного участия человека. Самое время оглянуться назад, чтобы понять, какими путями человечество пришло к этому рубежу.
Но прежде чем мы начнём, рассмотрим…
Вопрос терминологии
Название для автомобилей, способных передвигаться по дорогам общего пользования без водителя, устоялось далеко не во всех языках. Достаточно взглянуть на статью английской Википедии, чтобы увидеть, как много вариантов сейчас имеется в английском языке. Для заголовка статьи выбран термин autonomous car (автономная машина), а среди синонимичных вариантов приводятся driverless car (машина без водителя), self-driving car (самоуправляемая или самодвижущаяся машина) и robotic car (роботизированная машина). Более того, издание «Экономист» объясняет, что автономная и самодвижущаяся машина — принципиально разные понятия. Первое означает традиционный автомобиль с водительским местом, который способен полностью брать управление на себя, а второе — транспортное средство без органов управления. Разница, по крайней мере, для автопроизводителей, колоссальная. Автономные машины — это то, что они десятилетиями производят и продают, только с дополнительными возможностями, за которые можно просить больше денег. А вот появление самодвижущихся машин подразумевает рождение индустрии роботакси, что кардинальным образом изменит весь автомобильный рынок.
 В автомобиле, который компания Google представила в мае 2014 года, нет рулевого колеса и педалей.
В автомобиле, который компания Google представила в мае 2014 года, нет рулевого колеса и педалей.Терминологическая путаница — совершенно нормальное явление на данном этапе, ведь объект спора ещё не стал частью нашего быта. Какое-то название со временем должно вытеснить остальные, и вовсе не обязательно победителем окажется одно из перечисленных. Вполне может быть, что за автономными машинами в английском закрепится короткое и ёмкое слово robocar.
В русском всё ещё сложнее. Автономный автомобиль, автомобиль-робот, самоуправляющийся автомобиль, самодвижущийся автомобиль или просто автомобиль без водителя — вариантов, используемых в журналистике, литературе и речи, множество. Пожалуй, наиболее распространённый — беспилотный автомобиль — одновременно и самый неудачный. Действительно, почему он беспилотный? Ведь и в традиционных автомобилях пилотов тоже нет.
Название это возникло по аналогии с термином «БПЛА» — беспилотный летательный аппарат. «БПЛА» — очень точное название: это действительно летательный аппарат (самолёт, вертолёт или что-то иное), в котором, в противоположность традиционному аналогу, нет пилота. Более того, не просто нет, а не может быть — БПЛА изначально проектируются для выполнения задач, которые должны выполняться без пилота. Однако при переносе прилагательного из авиации в автопром смысл сильно исказился. Ведь в самоуправляющемся автомобиле водитель, как правило, присутствует, и даже может вмешаться в процесс. Просто теперь его участие в управлении автомобилем опциональное.
Поэтому для точности терминологии мы будем придерживаться названий «самоуправляемый автомобиль» и «автономный автомобиль», прибегая к варианту «автомобиль без водителя» для тех немногочисленных случаев, когда речь идёт о полностью самостоятельной машине. А «беспилотными автомобилями» пусть называются будущие спортивные болиды.
Попробуем теперь ответить на вопрос,
Как заменить водителя?
Если коротко, требуется сделать две вещи. Машину нужно научить, во-первых, прокладывать маршрут, а во-вторых, успешно передвигаться по дорогам, в том числе в окружении других транспортных средств. Первой задачей всерьёз занялись относительно недавно, с появлением спутниковой навигации и электронных карт местности, и справились с её решением довольно быстро. А вот вторую решают уже много десятилетий, и до сих пор трудно сказать, позволяет ли нынешний уровень развития технологий выпускать полностью автономные машины на улицы.
Рассмотрим, какой функциональностью должны обладать системы, отвечающие за автономное передвижение, и когда эти системы впервые появлялись на автомобилях. Прежде всего — и это самое простое, — автомобиль должен уметь набирать и сбрасывать скорость, а также поворачивать. Для этого нужны модуль управления подачей топлива, приводы тормозов и руля. Не забудем и о задаче автоматического переключения передач, каким бы очевидным ни казалось нам сейчас её решение. Можно даже утверждать, что именно изобретение автоматической трансмиссии в 1921 году и её внедрение в серийные модели марки «Олдсмобиль» в 1939 году были одними из первых шагов к созданию самодвижущихся машин.
 Реклама автоматической коробки передач для автомобилей марки Oldsmobile.
Реклама автоматической коробки передач для автомобилей марки Oldsmobile.Помимо «рук» и «ног» робомобилю нужны «глаза» — камеры, позволяющие «видеть» дорогу, отмечать её границы, а также отдельные полосы движения, «читать» дорожные знаки и распознавать сигналы светофоров. С ними машина способна двигаться по пустой трассе. Для ориентирования в потоке тоже нужно зрение, но иное: расстояние до других машин лучше определять с помощью радаров и лидаров. Важно также собирать информацию о скорости движения автомобиля, угловой скорости вращения колёс, давлении в шинах, наличии осадков. И конечно, все системы должны быть подключены к компьютеру, который будет анализировать поступающую информацию и управлять движением. Он же отвечает за распознавание образов на изображениях, поступающих от камер.
Узнавание объектов и принятие решений — те самые проблемы, которые пока удерживают автомобили-роботы на полигонах. Прототипы, способные уверенно ездить по дорогам, существуют достаточно давно. Но прежде чем выпускать машины без водителей на улицы, нужно убедиться, что даже в самых сложных ситуациях управляемый компьютером автомобиль обеспечит не меньшую безопасность, чем живой человек.
Все остальные технические задачи уже решены. Посмотрим,
Как автомобили учились ездить самостоятельно
«Одно из самых поразительных творений современной науки будет продемонстрировано в следующую субботу. Автомобиль-фантом проедет по дорогам города без водителя и пассажиров», — писали американские газеты. Автомобиль без людей, без протянутых к нему проводов, самостоятельно проехал по улицам Нью-Йорка ещё в 1925 году — и, по-видимому, это был первый в истории пример автомобиля без водителя. Но управлялся он всё-таки человеком: компания Houdina Radio Control оснастила «Чандлер» двумя приёмниками радиосигнала, а ехавший за ним автомобиль — двумя передатчиками. Оператор, сидевший во второй машине, подавал команды, которые передавались по радио на первую машину, а электромоторы приводили в движение рулевое колесо, педали газа и тормоза, выжимали сцепление и переключали передачи.
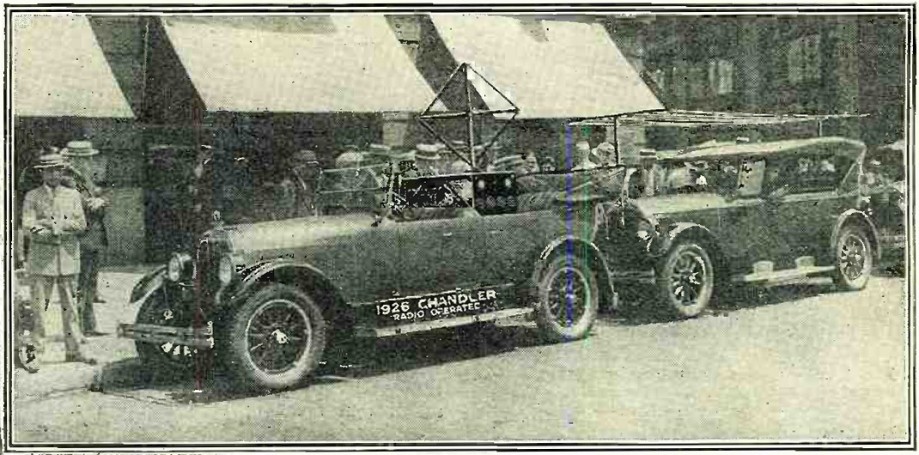 Автомобиль Chandler (слева), управляемый дистанционно с помощью радио.
Автомобиль Chandler (слева), управляемый дистанционно с помощью радио.Да, переключали передачи — как ни удивительно, автомобили научились ездить без водителя раньше, чем автоматические трансмиссии появились в серийных машинах. Вспомните об этом, садясь в следующий раз в свою машину с «автоматом».
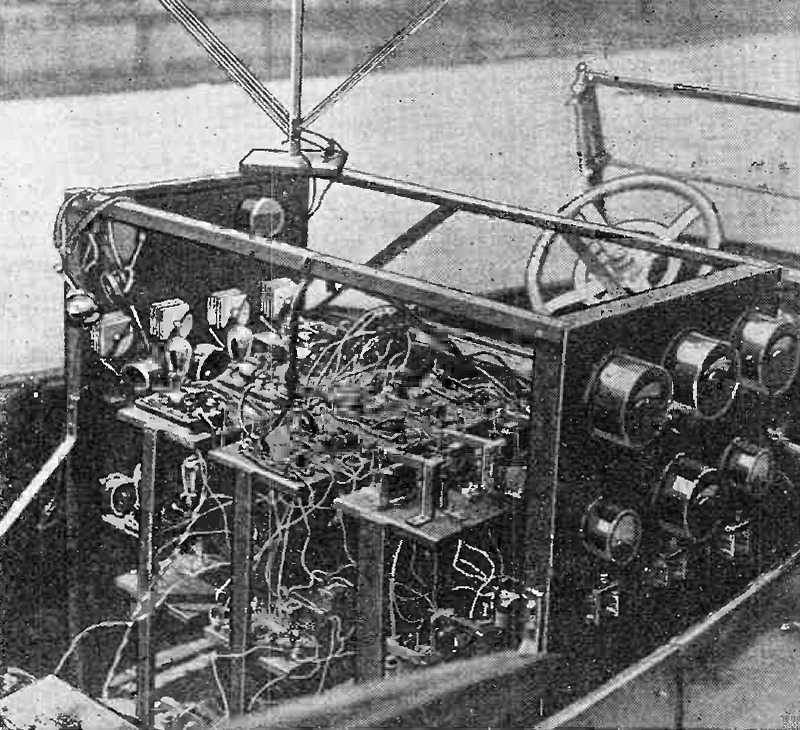 Управляемый дистанционно Chandler был оборудован приёмной антенной и системой реле.
Управляемый дистанционно Chandler был оборудован приёмной антенной и системой реле.Следующей задачей, за которую взялись инженеры, стало обеспечение возможности держаться дороги вообще без участия человека. В отсутствие камер, лазеров и компьютеров решение нашлось в виде бесконтактных электромагнитных меток, расположенных под поверхностью дороги. Проложенные под землёй провода служили антеннами для системы управления автомобилями, которая могла определять присутствие и скорость транспортных средств, а также посылать управляющие сигналы.
Работы в этом направлении велись в США в 1950-х годах, а в 1960 году была продемонстрирована возможность управления автомобилем подобным образом. Присутствующим журналистам даже предложили проехаться на самоуправляемых автомобилях. Тогда полагали, что технология будет массово внедрена к 1975 году.
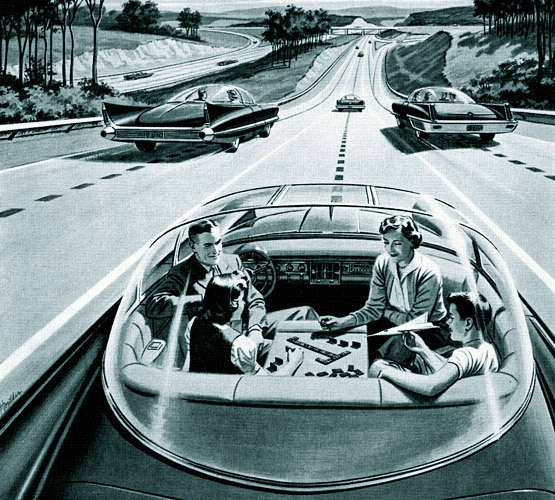 Электроэнергетические компании Central Power и Light Company в 1956—1957 годах запустили рекламную кампанию, в которой предсказывали наступление эпохи самоуправляемых автомобилей. «В один прекрасный день ваша машина сможет мчаться по электрическому суперхайвею, её скорость и направление движения будут автоматически управляться электроникой, встроенной в дорогу. Трассы сделаются безопасными благодаря электричеству! Никаких пробок, никаких столкновений, никакой усталости у водителей».
Электроэнергетические компании Central Power и Light Company в 1956—1957 годах запустили рекламную кампанию, в которой предсказывали наступление эпохи самоуправляемых автомобилей. «В один прекрасный день ваша машина сможет мчаться по электрическому суперхайвею, её скорость и направление движения будут автоматически управляться электроникой, встроенной в дорогу. Трассы сделаются безопасными благодаря электричеству! Никаких пробок, никаких столкновений, никакой усталости у водителей». Профессор Садаюки Цугава.
Профессор Садаюки Цугава.Этого не произошло, но как раз в конце семидесятых появился, как считается, первый автономный автомобиль. Он был создан в 1977 году группой инженеров из Университета Цукубы, в которую входили Садаюки Цугава (Sadayuki Tsugawa), Теруо Ятабэ (Teruo Yatabe), Такэси Хиросэ (Takeshi Hirose) и Сюнтэцу Мацумото (Shuntetsu Matsumoto). Команда под руководством Цугавы оснастила автомобиль двумя камерами, изображение с которых обрабатывалось аналоговым компьютером. Скорость автомобиля достигала 30 км/ч.
 Профессор Эрнст Дикманнс.
Профессор Эрнст Дикманнс.Развитие самоуправляемых автомобилей в восьмидесятых тесно связано с именем Эрнста Дикманнса (Ernst Dickmanns), профессора Военного университета Мюнхена. Его команда создала систему, способную в режиме реального времени обрабатывать и интерпретировать информацию, поступающую с видеокамер. Производительность компьютеров того времени была совершенно не сопоставима с тем, что доступно сейчас, и для достижения результата изобретались и применялись оригинальные технические и программные решения. Например, платформа, на которой установлены камеры, совершала саккадические движения, чтобы сконцентрировать внимание на наиболее важных деталях окружающей обстановки.
Для экспериментов использовался пятитонный фургон «Мерседес», оснащённый системами привода органов управления, а также камерами и другими датчиками. Главным прорывом германской команды стало программное обеспечение, которое принимало видеоизображение в реальном времени и выдавало команды управления автомобилем.
 Прототип VaMoRs.
Прототип VaMoRs.В 1986 году автомобиль, получивший название VaMoRs, смог передвигаться полностью самостоятельно, а в следующем году удалось добиться автономного движения со скоростью до 96 км/ч.
 Интерьер прототипа VaMoRs.
Интерьер прототипа VaMoRs.Технологии Дикманнса достигли зрелости к середине девяностых. В октябре 1994 года на французской трассе A1 неподалёку от парижского аэропорта имени Шарля де Голля состоялась итоговая презентация в рамках европейского проекта Eureka Prometheus Project (PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety — Программа европейского дорожного движения с максимальной эффективностью и беспрецедентной безопасностью). Два прототипа-близнеца на базе автомобиля «Мерседес-Бенц-500SEL»: VITA-2 компании «Даймлер-Бенц» и VaMP мюнхенского Военного университета — проехали в обычном плотном потоке более тысячи километров по трёхполосному шоссе, достигая скорости 130 км/ч. В рамках презентации удалось продемонстрировать движение по свободным полосам, поддержание дистанции до впередиидущего автомобиля, перестроения между полосами с пропуском проезжающих по ним автомобилей.
 Самоуправляемый Mercedes-Benz 500SEL, использовавшийся в проекте Prometheus.
Самоуправляемый Mercedes-Benz 500SEL, использовавшийся в проекте Prometheus.Осенью 1995 года состоялся ещё один масштабный тест. Автономный автомобиль совершил пробег через всю Германию — от Мюнхена до датского Оденсе и обратно. Благодаря отсутствию на германских автобанах ограничения скорости, робомобиль на отдельных участках достигал впечатляющих 175 км/ч. Средняя дистанция, которую машина проходила без перезапуска системы, составила 9 км, максимальная — 158 км. Более половины перезапусков не потребовали вмешательства человека. Автомобиль проехал самостоятельно 95% всего пути.
А чуть раньше, в июле 1995 года, в США состоялся аналогичный пробег, получивший название No Hands Across America («Без рук через Америку»). Дин Померло (Dean Pomerleau) из Института робототехники Университета Карнеги — Меллон и аспирант того же института Тодд Йохем (Todd Jochem) оснастили пятилетний минивэн «Понтиак Транс Спорт» (Pontiac Trans Sport) системой Navlab 5. Разработанная в стенах института система работала под управлением написанной Дином программы RALPH (Rapidly Adapting Lateral Position Handler), задача которой заключалась в интерпретации изображений с камер и информации от датчиков, а также управлении рулём. С 23 по 30 июля экипаж преодолел 4585 км от Питтсбурга до Сан-Диего. 98,2% пути автомобиль прошёл самостоятельно, однако из соображений безопасности компьютер управлял только рулём, а скорость контролировали испытатели.
 Дин Померло (слева) и Тодд Йохем. Надпись на плакате: «Калифорния — или провал!».
Дин Померло (слева) и Тодд Йохем. Надпись на плакате: «Калифорния — или провал!».Стоимость оборудования и ПО составила всего 20 000 долларов — совсем ничего по сравнению с 800 млн ЭКЮ, которые составили бюджет европейского проекта «Прометей». Впрочем, в эту сумму не включены годы работы над пятью поколениями системы Navlab и над программными комплексами: до появления в 1995 году RALPH использовалась система ALVINN (Autonomous Land Vehicle In a Neural Network), которая использовала для принятия решений искусственную нейронную сеть. Сердцем системы стал компьютер с 32 Мб памяти и процессором microSPARC 50 МГц, по производительности аналогичный 486DX2 66 МГц. К нему подключалась единственная цветная камера Sony DXC-151A с разрешением 640×480, GPS-приёмник и волоконно-оптический гироскоп. Любопытно, что GPS-приёмник использовался для определения скорости и направления движения, но не координат — в те годы точность GPS для гражданских лиц была загрублена.
Конечно, из этого не следует, что в европейской программе миллионы были выброшены на ветер. Несмотря на то, что созданию пятого поколения Navlab предшествовал десяток лет исследований, а результаты обоих испытаний выглядят схожими, проект Померло предоставлял совсем иной уровень автономности по сравнению с европейским «Прометеем». Если пробег по Германии демонстрировал уверенное движение по трассе без перекрёстков и пересечений дорог, то поездка Померло и Йохема была, по сути, испытанием усовершенствованного круиз-контроля, который умел поворачивать руль, удерживая машину внутри линий разметки. Вряд ли такой эксперимент завершился бы успехом в Германии, на дорогах которой разница в скоростях движения машин может превышать сотню километров в час.
Последующие двадцать лет ушли на совершенствование алгоритмов. Автономные машины стали намного умнее и куда более уверенно принимают верные решения в сложных ситуациях. Но пока полностью самоуправляемые автомобили лишь готовятся к серийному производству, мы наблюдаем, как…
Компьютеры забирают работу у водителей
Прогресс наступает с двух сторон. Полностью автономные машины набивают шишки на полигонах, а на серийных автомобилях появляются всё более изощрённые электронные системы, упрощающие работу водителя и перекладывающие её на свои плечи. А началось всё, пожалуй, в 1992 году в Японии, когда «Мицубиси» выпустила первый в мире автомобиль с технологией определения расстояния до находящегося впереди объекта.
 Mitsubishi Debonair 1992 года. Первый серийный автомобиль с системами предупреждения об опасном сближении и о пересечении линии разметки.
Mitsubishi Debonair 1992 года. Первый серийный автомобиль с системами предупреждения об опасном сближении и о пересечении линии разметки.«Мицубиси Дебонэйр» был оснащён системой предупреждения о расстоянии Distance Warning. Она использовала лидар для определения расстояния до впередиидущего автомобиля и в случае опасного сближения предупреждала водителя.
В 1995 году та же «Мицубиси» применила на модели «Дайаманти» (Mitsubishi Diamante) систему Preview Distance Control, использующую лазерный луч. Новая система уже умела управлять подачей газа и переключать передачи. А в 2000 году «Тойота» оснастила свою модель «Селсиор» (Celsior) системой лазерного круиз-контроля, которая впервые использовала тормоза. Ещё через четыре года тойотовцы выпустили модель «Краун Маджеста» (Crown Majesta) с доработанной системой ACC (Adaptive Cruise Control), использующей радар и цифровую камеру. Если впередиидущий автомобиль остановился, она предупреждала водителя и использовала тормоза для полной остановки — впервые в мире.
Описанная технология известна как адаптивный, или автономный круиз-контроль. Её задача — поддерживать постоянную скорость на трассе, но, в отличие от обычного круиз-контроля, учитывать также дополнительные факторы, и самое главное — более медленные автомобили. Параллельно ей развивалась технология предупреждения о столкновениях. Система, препятствующая столкновениям, активна не только при включённом круиз-контроле, но и в остальных режимах движения (если водитель её не отключил принудительно), и реагирует не только на автомобили, но и на пешеходов и прочие препятствия. Её задача — смягчить последствия столкновения, если водитель по каким-то причинам не может предпринять адекватных мер.
Первым в мире серийным автомобилем, оснащённым активной системой смягчения столкновений, стала «Хонда Инспайр» (Honda Inspire) в 2003 году. Разработанная «Хондой» система торможения для смягчения последствий столкновения CMBS (Collision Mitigation Brake System), распознав опасность столкновения, пытается предупредить водителя. Сначала раздаётся звуковой сигнал, а на панели приборов появляется команда «Тормози!», затем автомобиль сбрасывает газ и начинает лёгкое притормаживание, отдаляя момент удара. Одновременно ремень водительского кресла несколько раз дёргается. Если водитель не отреагировал и на это, у всех ремней безопасности выбирается свободный ход и начинается торможение. Сильное, но не экстремальное, — с ускорением 0,6 g, то есть примерно на 60% от максимально возможного.
 Honda Inspire на полигоне. Демонстрация системы смягчения последствий столкновений.
Honda Inspire на полигоне. Демонстрация системы смягчения последствий столкновений.Чуть раньше серийные автомобили научились держаться полосы. И снова пионерами были японцы. «Ниссан Сима» (Nissan Cima) 2001 года умел корректировать положение руля, если машина начинала уходить за линию разметки. А пассивная система, умеющая лишь предупреждать водителя, появилась в 1992 году на уже упоминавшемся «Мицубиси Дебонэйр».
Относительно недавно машины научились смотреть не только вперёд, но и по сторонам. Технология, снимающая информацию с дорожных знаков, впервые появилась на новом БМВ 7-й серии в конце 2008 года. Она умела считывать ограничения скорости и выводить актуальное значение на спидометре и проекционном дисплее. Система распознавала дорожные знаки, не только установленные на обочине, но и размещённые над дорогой.
Водителю эта технология дала не очень много — информация об ограничениях скорости есть и в электронных картах, используемых для навигации. Но карты можно использовать лишь до тех пор, пока данные об ограничениях скорости являются рекомендацией для водителя. Но если в автомобиле используется адаптивный круиз-контроль, полагаться только на карты нельзя. Они могут оказаться устаревшими — пусть даже всего на сутки — и не располагать данными о вре́менных знаках, которые сопровождают, например, дорожные работы.
 Пиктограммы дорожных знаков на панели приборов автомобиля BMW.
Пиктограммы дорожных знаков на панели приборов автомобиля BMW.А вот информация, получаемая с камеры, является актуальной, и может быть использована системой адаптивного круиз-контроля. Благодаря взаимодействию этих двух технологий автомобиль способен самостоятельно сбрасывать скорость на участках с более жёстким ограничением и восстанавливать её, когда ограничение снято. Принимается во внимание также информация о погоде: если установлен знак «ограничение 40 км/ч в дождь», электроника предупредит о таком ограничении водителя и снизит скорость только во время дождя. Система контроля за знаками может учитывать также ограничения, действующие в течение определённого времени суток, и даже наличие прицепа-автодома: для оснащённых такими прицепами машин могут действовать свои ограничения.
Помощь водителю не сводится к оперативному управлению автомобилем: разгону, торможению, удержанию на полосе, перестроениям и парковке. Электроника взяла на себя и более глобальную задачу — составление маршрута, и сейчас спутниковая навигация в машинах кажется абсолютно привычным делом. Первым автомобилем с GPS-навигацией стала «Мазда Эунос Космо» (Mazda Eunos Cosmo), вышедшая в 1990 году.
 Mazda Eunos Cosmo — первый серийный автомобиль со спутниковой навигационной системой.
Mazda Eunos Cosmo — первый серийный автомобиль со спутниковой навигационной системой. Electro Gyrocator.
Electro Gyrocator.Любопытно, что геопозиционирование в автомобилях появилась заметно раньше, причём спутники не использовались вовсе. Первая коммерческая система геопозиционирования, получившая название Electro Gyrocator, была разработана «Хондой» в сотрудничестве с «Алпайн» (Alpine Electronics, アルパイン株式会社) и рядом других компаний, и как следует из названия, использовала для определения местоположения гироскоп. Перед поездкой водитель доставал из альбома прозрачный лист с картой местности, отмечал на ней конечную точку пути и устанавливал карту в устройство так, чтобы светящаяся точка указывала на текущее местоположение. Маршрут приходилось составлять самостоятельно.
 Система Electro Gyrocator использовала аналоговые карты местности в виде листов формата A5.
Система Electro Gyrocator использовала аналоговые карты местности в виде листов формата A5.Система устанавливалась на автомобили «Хонда Аккорд» (Honda Accord) и «Хонда Вигор» (Honda Vigor) в 1981 году, но не снискала большой популярности. Цена составила 300 000 иен (около 2700 долларов США), что увеличивало стоимость машины примерно на четверть.
Что дальше?
Таким был путь, которым технология самоуправляемых автомобилей подошла к сегодняшнему дню. В настоящее время работу над машинами, способными ездить самостоятельно, ведут десятки автомобильных компаний, от признанных мировых лидеров до таких заводов, как ГАЗ и КамАЗ. К ним спешат присоединиться монстры IT-индустрии, желающие передела рынка.
Что происходит в этой области прямо сейчас? Какие планы у автомобильных брендов и на что надеются новые игроки? Что мешает вывести самоуправляемые автомобили на улицы немедленно, и действительно ли они безопасны? Заглянуть в будущее всегда интереснее, чем узнать прошлое. Но ответы на эти вопросы — тема отдельной статьи.
как беспилотный транспорт может повлиять на развитие экономики — РТ на русском
Крупнейшие автопроизводители и сервисы пассажирских перевозок активно вкладываются в создание беспилотных машин. Первые экземпляры уже тестируют не только на полигонах, но и на городских дорогах. Эксперты считают, что использовать автомобили без водителей не только безопаснее, но и выгоднее в финансовом отношении. Как автономный транспорт может повлиять на экономику — в материале RT.
В ближайшие два года компании из США, Японии, Франции, Германии и Китая собираются представить собственные беспилотные автомобили. В их активной разработке участвуют не только сами производители, но и сервисы такси.
Например, в Uber есть подразделение по разработке беспилотных технологий, стоимость которого оценивается в $7,25 млрд. В апреле оно смогло привлечь инвестиции на $1 млрд. Две трети суммы — от Toyota Motor Corp. и крупного производителя автокомпонентов Denso Corp.
Уже в следующем году Tesla рассчитывает запустить службу беспилотного такси. Как заявил основатель и генеральный директор компании Илон Маск, в 2020-м на дорогах появится миллион электромобилей Tesla без водителя.
«Преимущество автономных машин в первую очередь обеспечивает их высокая безопасность. У качественного беспилотника меньше шансов попасть в аварию. Исключается также и человеческий фактор, например усталость и невнимательность. Кроме того, беспилотник не станет нарушать правила дорожного движения», — отметил исполнительный директор аналитического агентства «Автостат» Сергей Удалов в беседе с RT.
В исследовании американского инвестиционного фонда ARK Invest говорится, что количество ДТП у беспилотных такси может снизиться на 80% по сравнению с сегодняшними средними показателями на дорогах.
Цена вопроса
Активность автопроизводителей эксперты объясняют прежде всего финансовой выгодой. Как подчеркнул Сергей Удалов, беспилотные машины экономичнее традиционных. Причём наиболее эффективным стало бы их использование в качестве такси. В первую очередь экономию даёт отсутствие водителя.
В ARK Invest отмечают, что выгоду беспилотникам также обеспечит высокий коэффициент использования автомобиля, который будет наматывать до 100 тыс. миль (161 тыс. км) в год и за пять лет вырабатывать весь свой ресурс.
По подсчётам экспертов фонда, стоимость поездки на автономном такси будет ниже по сравнению с обычными сервисами. Например, в США проезд в беспилотнике обойдётся в $0,26 за милю (1,61 км), что в десять раз меньше, чем в обычном такси с водителем.
Впрочем, пока первая попытка запуска такси-беспилотника не привела к удешевлению стоимости проезда. В декабре прошлого года принадлежащая Alphabet компания Waymo запустила перевозку пассажиров на своих автономных автомобилях в пригороде Финикса (штат Аризона). Как сообщает Reuters, в первый день стоимость поездки практически не отличалась от предложений Uber.
Без дальнобойщиков
Беспилотные технологии развиваются не только для такси и пассажирских автомобилей. Не отстают от них и автономные грузовики.
Также по теме
 Едем дальше: что нового ждёт российских автомобилистов в 2019 году
Едем дальше: что нового ждёт российских автомобилистов в 2019 году В 2019 году вступает в силу ГОСТ на новые автомобильные и мотоциклетные номера. Кроме того, с августа водителям необходимо будет…
В мае прошлого года Минтранс России испытал беспилотные КамАЗы на подходе к Крымскому мосту. Грузовики под управлением бортовых компьютеров разгонялись до 40 км/ч. Испытания стали частью проекта «Караван» по применению беспилотных грузовиков на дорогах.
Беспилотники могут работать и в более сложных условиях. В апреле этого года на одном из канадских рудников уже не в тестовом, а в обычном режиме заработал самосвал без водителя Komatsu, сообщает Canadian Mining Journal. 400-тонный тяжеловес стал одним из самых больших автономных автомобилей в мире.
Власти Сингапура хотят использовать беспилотники для уборки улиц. Разработкой таких машин уже занимаются два консорциума. Первые результаты планируется представить через полтора года, сообщает газета The Straits Times.
Доцент кафедры экономической безопасности РАНХиГС Павел Грибов в разговоре с RT подчеркнул, что в беспилотных технологиях больше всего перспектив именно у грузового автотранспорта.
«В настоящее время фура совершает рейс из пункта А в пункт Б, а потом возвращается туда, где живёт водитель. В случае беспилотников можно использовать схему, применяемую в морском транспорте: судно не возвращается из пункта Б, а идёт дальше, в пункты В, Г и так далее. Можно составить логистику так, чтобы грузовик больше времени передвигался с грузом, а не шёл пустой», — пояснил Грибов.
Майские испытания
В мае на дорогах Москвы может начаться испытание автомобиля без водителя, сообщил ТАСС генеральный директор «Яндекс. Такси» Тигран Худавердян.
Тестовые испытания на столичных дорогах — часть правительственного эксперимента. В прошлом году премьер-министр Дмитрий Медведев подписал постановление, которое разрешает с 1 декабря 2018 года испытывать беспилотные авто в Москве и Татарстане.
Как сообщил вице-премьер Максим Акимов, промежуточные результаты эксперимента планируется оценить 1 марта 2020 года. Окончательные выводы будут сделаны в марте 2022 года. После этого власти определят сроки повсеместного использования беспилотников на российских дорогах.