Н а привод что это такое
Что означает н а привод на авто. Все обо всем
Типы привода.
Практически каждый автолюбитель знает, каким бывает привод у автомобилей, ну или по крайней мере, знает, какой привод на его автомобиле. Давайте разберемся, какие все-таки существуют типы привода и в чем их отличия. Итак, для того, чтобы автомобиль поехал, необходимо, чтобы крутящий момент от двигателя авто передавался на его колеса. В зависимости от того, сколько колес этот крутящий момент будет принимать, зависит и тип привода.
Существует три типа привода: передний, задний и полный.
Передний привод автомобиля.
Переднеприводные автомобили получают всю энергию двигателя на передние колеса. Как минимум, это логично, потому что на большинстве автомобилей двигатель находится спереди и передняя часть более нагружена, а следовательно — имеет большее сцепление передних колес с дорогой. Чаще такой привод встречается на современных автомобилях бюджетного класса, но бывает и на дорогих моделях. Автомобиль с передним приводом подвержен заносу в поворотах на неоднородном покрытии, но гораздо в меньшей степени, чем автомобили с задним приводом. Но все-таки автомобили с передним приводом гораздо чаще наделены другим недостатком — недостаточной поворачиваемостью, то есть сносу передних ведущих колес на внешний радиус при прохождении поворотов. И если этот «недуг» в большинстве штатных ситуации никак не дает о себе знать, то при активном вождении может причинить массу неприятностей водителю. При возникновении недостаточной поворачиваемости в дело может вступать рассмотренная нами система динамической стабилизации и ликвидировать потенциально опасную ситуацию. Кроме того, при активном старте передняя часть автомобиля разгружается, в следствии чего уже не имеет максимального уровня сцепления с дорогой. По этой причине переднеприводным автомобилям сложно реализовать весь потенциал двигателя при разгоне, если его мощность превышает значение в 200 л.с. Для лучшего поведения автомобиля на дороге при этом условии его оснащают Противобуксовочной системой или блокировкой межколесного дифференциала, чтобы избежать пробуксовку ведущих колес.
Преимущества переднего привода:
Недостатки переднего типа привода:
- Вибрация от мотора из-за жесткого крепления передаётся на кузов.
- Руль при интенсивном разгоне передаёт реактивные усилия (выражающиеся виде толчков). Поэтому переднеприводные автомобили мощностью более 250 л.с. как правило, не выпускают из-за невозможности реализовать потенциал двигателя.
- При резком старте происходит перераспределение веса назад, передняя ось разгружается, и ведущие колёса имеют склонность к пробуксовке.
- Снос передней части автомобиля.
Задний привод автомобиля.
При заднем приводе энергия двигателя целиком поступает на задние колеса. Положительной стороной этого привода является отличная управляемость и динамика, отсутствие вибрации (передаваемой на кузов и руль) положительно сказывается на комфорте как для водителя, так и пассажиров. Поэтому на современных автомобилях задний привод применяют на моделях премиум брендов или на спортивных моделях, в которых важна азартная управляемость и «чистый руль», на который не будут передаваться вибрации, ухудшающие «чувство автомобиля». Одним из главных минусов заднего привода является склонность к заносам, особенно на скользкой дороге. Этот эффект проявляется в том, что при избытке тяги на ведущих колесах заднюю часть автомобиля начинает заносить –это и называют заносом или избыточной избыточной поворачиваемостью.
Преимущества заднего привода:
На рулевое колесо не воздействуют реактивные моменты при разгоне, что улучшает качество контроля над автомобилем.
При быстром и резком ускорении с места вес машины перераспределяется назад и ведущие колёса меньше подвержены пробуксовке и потере сцепления с дорогой, что позволяет эффективнее стартовать.
Нагрузка по осям хорошо распределена, оптимально распределяется работа между передними и задними шинами, что предотвращает их быстрый износ.
Недостатки заднего привода:
Дороговизна в производстве, что отражается на конечной цене автомобиля.
Автомобили с задним типом привода тяжелее в сравнении с переднеприводными. У них, как правило, всегда по центру кузова расположен тоннель, «съедающий» полезный объем салона и уменьшающий комфорт задних пассажиров.
Проходимость в условиях снега и грязи хуже, чем у переднее- или полноприводных машин.
Склонность к заносу задней оси автомобиля.
Полный привод автомобиля.
Когда энергия двигателя передается на все четыре колеса автомобиля, такой привод называется полным. В непогоду или сложных дорожных условиях у автомобилистов зачастую возникают мысли о приобретении автомобиля с приводом на все колеса или, иначе говоря, полноприводного автомобиля. При упоминании об этом типе автомобилей зачастую на ум обывателя приходят внедорожники, однако в современных условиях это скорее всего установившийся стереотип: полноприводная трансмиссия на сегодняшний день — отнюдь не прерогатива «джипов», а вполне традиционная распространенная схема, пусть и с множеством вариаций в исполнении, но встречающаяся даже на малолитражках. К плюсам полноприводных авто относится хорошая проходимость и возможность стартовать с места без пробуксовки колес практически на любом дорожном покрытии. Главный минус полного привода – он тяжелый и дорогой. В некоторых моментах поведение машины с полным приводом на дороге может стать непредсказуемым. Происходить подобное может из-за неравномерного распределения крутящего момента на колеса (например, одно колесо теряет сцепление с основным покрытием дороги). Данный тип привода требует аккуратного вождения.
Независимо от того, с каким приводом будущий владелец выбирает современный автомобиль, он будет снабжен той или иной системой динамической стабилизации, которая сделает Вашу поездку максимально комфортной и безопасной при непредсказуемых дорожных условиях. Прежде чем подробнее рассмотреть различные варианты полного привода, необходимо дать определение такому устройству, как дифференциал и причины его необходимости в конструкции схемы любого типа привода для автомобилей.
Дифференциал – это шестеренное устройство, передающее крутящий момент на ведущие колеса и обеспечивающее их разную скорость вращения для обеспечения поворота а/м без износа покрышек (у внутреннего колеса путь короче, чем у внешнего).
Дифференциал является одним из основных конструктивных элементов трансмиссии.Расположение дифференциала в трансмиссии автомобиля:
В заднеприводном автомобиле для привода ведущих колес – в картере заднего моста;
В переднеприводном автомобиле для привода ведущих колес – в коробке передач;
В полноприводном автомобиле для привода ведущих колес
Н а привод
Виды приводов автомобиля
Все современные серийные легковые автомобили имеют две оси и четыре колеса. Через колесо крутящий момент от двигателя автомобиля передаётся к дорожному полотну. В этой статье мы рассмотрим типы приводов автомобиля, сколько колёс приводятся в движение двигателем и как это сказывается на поведении авто на дороге.
По этому вопросу автомобили можно разделить на две группы: моноприводные и полноприводные. В своё очередь эти группы тоже могут разделяться на подгруппы. Но всё по порядку.
Монопривод
Монопривод означает, что у автомобиля ведущей является только одна ось из двух. Хронологически, на автомобилях первым начали применять задний привод. Задние колёса были ведущие, передние управляемые. Технологии того времени не позволяли совмещать привод на ось и возможность ею управлять. На современных автомобилях привод на задние колёса распространён в меньшей степени.
Таким типом привода обычно оснащают автомобили «Е» класса и выше, изредка «D» класса. Меньшая популярность вызвана особенностью компоновки таких авто. От двигателя к задней оси необходимо протянуть карданный вал, для передачи крутящего момента.
Это требует наличия в кузове трансмиссионного тоннеля, который отнимает пространство на заднем ряду сидений. Также, автомобили с задним приводом предъявляют повышенные требования к водительским навыкам(особенно зимой или на скользкой дороге). Но считается, что такие автомобили имеют лучшую управляемость.
Передний привод
Первые серийные автомобили с таким типом привода появились в 30-е годы 20 века. Сегодня, этот тип привода является основным для большинства серийно выпускаемых автомобилей. Его популярности способствует меньший вес и более безопасное поведение на дороге, в сравнении с заднеприводными авто.
Отсутствие трансмиссионного тоннеля позволяет увеличить объём и размеры салона, при тех же внешних габаритах. Подавляющие большинство авто от «А» до «Е» класса оснащаются именно этим типом привода.
Полный привод
Крутящий момент двигателя может передаваться на передние и на задние колёса, т.е. обе оси ведущие. ПП можно разделить на три подвида: постоянный ПП, подключаемый ПП и автоматически подключаемый ПП.
Постоянный полный привод. В автомобиле с такой системой обе оси и все четыре колеса являются ведущими. Эта система позволяет ездить и по твёрдым дорогам и по бездорожью. В трансмиссии такого автомобиля обязательно присутствует межосевой дифференциал.
Небольшое отступление, дифференциал – это механическое устройство, которое распределяет крутящий момент, полученный с приводного вала, пропорционально между ведущими колёсами, автоматически компенсируя разницу в скорости их вращения.
Можно сказать, что дифференциал направляет момент на ведущие колеса, позволяя им вращаться с разными(дифференцированными) угловыми скоростями. Дифференциал устанавливается на все ведущие оси(и передние и задние).
В таких системах межосевой дифференциал может быть свободным с принудительной блокировкой или самоблокирующийся. Машины со свободным дифференциалом на асфальте обладают посредственной управляемостью, из за его особенностей перераспределения крутящего момента.
Решением этой проблемы стало применение самоблокирующегося межосевого дифференциала. Автопроизводители применяют самоблоки различных конструкций, но их основной задачей является не допущение отключения оси, при пробуксовке колёс другой.
Подключаемый полный привод. Этот тип появился первым. Система характеризуется отсутствием межосевого дифференциала, жёстким подключением переднего моста. Т.е. передние и задние колёса крутятся с одинаковой скоростью.
Такой тип ПП нельзя использовать на дорогах с твёрдым покрытием. Колеса любой машины вращаются с одинаковой скоростью, только при прямолинейном движении. При повороте одно из колес каждой оси начинает крутиться быстрее, чем второе. А скорость самих осей тоже перестаёт быть одинаковой. Происходит это из-за того, что колеса идут по разным траекториям.
То, которое снаружи поворота, проходит больший путь, чем то, которое внутри. Так же и оси. Езде с большими скоростями в таком случае невозможна. Не позволит этого отвратительная управляемость, да и нагрузки на трансмиссию быстро выведут ее из строя, не говоря уже об износе шин. Дифференциал как раз и позволяет одной оси обгонять другую при возникновении разницы их скоростей.
Кратковременное, прямолинейное движение по твёрдому покрытию не нанесёт вреда автомобилю, но любой поворот будет вызывать затруднения. В грязи, на песке или гравии ничто не мешает колесам при необходимости проскальзывать благодаря слабому сцеплению колес с грунтом.
Такой тип ПП отлично подходит для эксплуатации автомобиля на бездорожье, при не частом выезде на дороги с твёрдым покрытием. Конструкция его трансмиссии проста и надёжна, при правильной эксплуатации она очень надёжна.
Автоматически подключаемый полный привод. Дальнейшее совершенствование систем ПП привело к появлению электронно-управляемых систем с переброской и перераспределением крутящего момента. На таких автомобилях компьютер отвечает за перераспределение крутящего момента на ту или иную ось, посредством электронно-управляемой муфты(которая заменила межосевой дифференциал).
За последние 20 лет такие системы сделали большой шаг вперёд. Они избавились от былой нелогичности и запаздывания срабатывания муфт. В первое время скорость обработки информации с колёсных датчиков была достаточно низкой, что и приводило к запаздываниям.
Современные серийные системы избавились от этих проблем с софтом. Но есть одно «но»: такой тип трансмиссии годится только для эксплуатации на твёрдых покрытиях с эпизодическими минимальными выездами на бездорожье, наподобие в меру разбитой грунтовки.
Большая часть электроноуправляемых муфт не рассчитаны на серьёзное бездорожье, при пробуксовке они перегреваются и отключаются. Причем для этого д
ПРИВОД — это… Что такое ПРИВОД?
Привод — Привод: В механике Привод (тоже самое силовой привод) совокупность устройств, предназначенных для приведения в действие машин. Состоит из двигателя, трансмиссии и системы управления. Различают привод групповой (для нескольких машин) и… … Википедия
ПРИВОД — ПРИВОД, привода, муж. 1. Действие по гл. привести в 1 знач. приводить. Привод людей. || Принудительное доставление кого нибудь (обвиняемого, свидетеля, эксперта и т.п.) в суд в случае отказа явиться добровольно (юр.). Привод под конвоем.… … Толковый словарь Ушакова
привод — и привод. В знач. «действие по знач. глаг. «приводить»» (принудительно доставлять обвиняемого, свидетеля) привод, мн. приводы, род. приводов. Привод в милицию. В знач. «устройство для приведения в движение какого либо механизма» привод, мн.… … Словарь трудностей произношения и ударения в современном русском языке
привод — Устройство для приведения в действие машин и механизмов. Примечание Привод состоит из источника энергии, механизма для передачи энергии (движения) и аппаратуры управления. Источником энергии служит двигатель (тепловой, электрический,… … Справочник технического переводчика
привод — машины; привод Система, состоящая из двигателя и связанных с ним устройств для приведения в движение одного или нескольких твердых тел, входящих в состав машины. привод робота; привод Часть исполнительного устройства робота, предназначенная для… … Политехнический терминологический толковый словарь
привод — ПРИВОД, а, муж. 1. см. привести. 2. Принудительное доставление в органы дознания или в суд не явившегося по вызову лица, а также временный арест для допроса (офиц.). П. в милицию. II. ПРИВОД, а и ПРИВОД, а, муж. Устройство или система устройств… … Толковый словарь Ожегова
ПРИВОД — (Gear) механизм для передачи вращательного движения из одного места в другое. Бывает привод ременный, зубчатый и пр. Самойлов К. И. Морской словарь. М. Л.: Государственное Военно морское Издательство НКВМФ Союза ССР, 1941 … Морской словарь
привод — передача, движитель; препровождение, пригон, допрос, доставление Словарь русских синонимов. привод сущ., кол во синонимов: 19 • бензопривод (1) • … Словарь синонимов
ПРИВОД — устройство, состоящее из источника энергии, передающих энергию (движение) механизмов и системы (приборов) управления для приведения в движение транспортных машин, различных станков и механизмов млн. их торможения. Источниками энергии (движения)… … Большая политехническая энциклопедия
ПРИВОД — принудительное препровождение (доставление) органами милиции (полиции) обвиняемого, подсудимого, подозреваемого, свидетеля и некоторых других лиц в суд, в органы дознания, к прокурору или следователю в случае их неявки (без уважительной причины)… … Юридический словарь
Электрический привод — Википедия
Электрический привод (сокращённо — электропривод, ЭП) — управляемая электромеханическая система, предназначенная для преобразования электрической энергии в механическую и обратно и управления этим процессом.
Современный электропривод — совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %)[1] и главным источником механической энергии в промышленности.
В ГОСТ Р 50369-92 электропривод определён как электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса [2].
Как видно из определения, исполнительный орган в состав привода не входит. Однако авторы авторитетных учебников[1][3] включают исполнительный орган в состав электропривода. Это противоречие объясняется тем, что при проектировании электропривода необходимо учитывать величину и характер изменения механической нагрузки на валу электродвигателя, которые определяются параметрами исполнительного органа. При невозможности реализации прямого привода электродвигатель приводит исполнительный орган в движение через кинематическую передачу. КПД, передаточное число и пульсации, вносимые кинематической передачей, также учитываются при проектировании электропривода.
Электропривод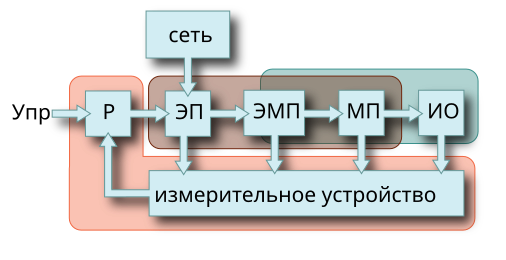
Функциональные элементы:
- Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
- Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
- Механический преобразователь (МП) может изменять скорость вращения двигателя.
- Упр — управляющее воздействие.
- ИО — исполнительный орган.
Функциональные части:
- Силовая часть или электропривод с разомкнутой системой регулирования.
- Механическая часть.
- Система управления электропривода[4].
Статические характеристики[править | править код]
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Шляпа[править | править код]
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.[1]
Электромеханическая характеристика двигателя[править | править код]
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика[править | править код]
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
По количеству и связи исполнительных, рабочих органов:
Классификация электроприводов по степени их автоматизации рабочих машин и механизмов и качеству выполняемых операций- Индивидуальный, в котором рабочий исполнительный орган приводится в движение одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления:
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения:
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока:
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций:
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
- Привод передач.
Автоматизированные электроприводы подразделяются еще на две подгруппы — разомкнутые и замкнутые. Работа разомкнутого привода заключается в том, что все внешние возмущения (для электрических приводов самым характерным из них является момент нагрузки) оказывают влияние на выходную переменную электрического привода, как пример — на его скорость. Иными словами, разомкнутый электрический привод не изолирован от влияния внешних возмущений, все изменения которых отражаются на его рабочих показателях. В разомкнутом приводе по этой причине не может обеспечиться высокий уровень качества регулирования переменных, хотя данный привод отличается простой схемой.
Основным отличием замкнутых электрических приводов является их общее или локальное удаление воздействий внешних возмущений на управляемую переменную электрического привода. В качестве примера можно привести тот факт что, скорость таких электрических приводов может оставаться практически неизменной при возможных колебаниях момента нагрузки. В силу этого обстоятельства замкнутый привод обеспечивает более качественное управление движением исполнительных органов, хотя его схемы являются более сложными и требуют, зачастую, применения силовых преобразователей энергии.
Замкнутый электропривод[править | править код]
Структура замкнутых электроприводов: а — с компенсацией возмущения; б — с обратной связью.Замкнутый электрический привод может быть построен по принципам отклонения с использованием обратных связей или компенсации внешнего возмущения.
Принцип компенсации мы можем рассмотреть на примере компенсации наиболее явно выраженного внешнего возмущения электропривода — момента нагрузки Мс при регулировании его скорости (рис.а).Основным признаком такой замкнутой структуры электрического привода является наличие цепи, по которой на вход привода вместе с задающим сигналом скорости подается сигнал UM = kM
Несмотря на свою высокую эффективность, электрические приводы по данной схеме выполняются крайне редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия).В связи с данным фактом подавляющее количество замкнутых структур электроприводов используют принцип обратной связи (отклонения). Он характеризуется тем что имеет цепь обратной связи, соединяющую выход электрического привода с его входом, отсюда и пошло название замкнутых схем.
Все виды применяемых в замкнутых электрических приводах обратных связей делятся на положительные и отрицательные, жесткие и гибкие, линейные и нелинейные.
Положительной называется обратная связь, в которой сигнал направлен согласно и складывается, с управляющим сигналом, в то время как сигнал отрицательной связи направлен в противоположную сторону (знак «минус» на рис. б).Жесткая обратная связь охарактеризована тем, что данная связь действует как в установившемся режиме, так и в переходном режиме электрического привода. Сигнал гибкой обратной связи производится только в переходных режимах электропривода и используется для обеспечения требуемого им качества, как пример устойчивости движения, допустимого перерегулирования и т.д.
Линейная обратная связь охарактеризована своей пропорциональной зависимостью между управляемой координатой и сигналом обратной свﮦязﮦи, в то время как при производстве нелинейной связи эта зависимость не будет пропорциональной.
Для регулирования движения исполнительных органов эксплуатируемых машин иногда требуется изменять несколько переменных электрического привода, например ток, момент и скорость. В таком случае замкнутые приводы создаются по одной из следующих структурных схем.
Электропривод с общим усилителем[править | править код]
Схема электропривода с общим усилителем.Схема с общим усилителем представлена на рисунке справа в качестве примера, данная схема является схемой регулирования двух переменных двигателя, где Д — скорости тока I. Схема содержит в себе силовой преобразователь электроэнергии П, устройство управления УУ, механическую передачу МП и датчики тока ДТ, скорости ДС и устройство токоограничения (токовой отсечки) УТО. Данная схема обеспечивает хорошую характеристику двигателя. На интервале скорости 0 — СOj за счет действия обратной связи по току (сигнал U) обеспечивается ограничение тока и момента двигателя и характеристика имеет близкий к вертикальному участок. При скорости Со > 00j узел УТО заканчивает действие связи по току и за счет наличия обратной связи по скорости (ОСС) (сигнал U ОCC) характеристика двигателя становится жестче ,что обеспечивает регулирование скорости.
Совокупность обратных связей, число которых может быть от двух и более, в схеме с единым усилителем образует своего рода модальный регулятор, а переменные при этом называются переменными состояния электропривода. Главной задачей модального регулятора можно считать обеспечение заданного качества динамических процессов в электроприводе — быстродействия, устойчивости и степени затухания переходных процессов. Это достигается выбором видов и соответствующим исследованием коэффициентов обратных связей по переменным электрического привода. Следует отметить, что система с суммирующим усилителем относится к системам управления с так называемой параллельной коррекцией.
Электропривод с наблюдающим устройством[править | править код]
Схема электропривода с наблюдающим устройствомВ сложных системах электроприводов, имеющих, в частных случаях, разветвленные кинематические цепи с упругими элементами, множество регулируемых переменных может оказаться весьма высоким. При данном факте измерение некоторых из них имеет некоторые затруднения по тем или иным причинам. В таких случаях прибегают к использованию так называемых наблюдающих устройств (наблюдателей).
Основную часть наблюдателя формируют совокупности моделей звеньев электрического привода, выполненных на основе операционных усилителей или элементов микропроцессорной техники. Выходные сигналы (напряжения) этих моделей, параметры которых соответствуют реально существующим звеньям электропривода, отображают близкие значения переменных.
Эксплуатация с применением наблюдателя на примере регулирования угла поворота вала двигателя поясняет структурная схема на рисунке 6, на которой приняты следующие обозначения: Д — двигатель, П — преобразователь, УУ — управляющее устройство, МП — механическая передача, НУ — наблюдающее устройство.
Электрический привод применяется для управления положением исполнительного органа φио. Это достигается соответствующим регулированием угла поворота φ вала двигателя, при котором необходимо также регулирование и других переменных — тока I, момента М и скорости двигателя.
Для применения рассматриваемого принципа управления, сигнал задания угла поворота фз подается на устройство управления УУ и одновременно на вход наблюдающего устройства НУ. Наблюдающее устройство НУ вырабатывает с помощью моделей звеньев привода сигналы, пропорциональные току, моменту и скорости, и направляет их устройству управления УУ.
Так же следует отметить, что модели звеньев не в состоянии учесть всех реальных возмущений, воздействующих на электрический привод и электрическую машину, и нестабильности параметров ЭП, НУ выдает в управляющее устройство не точные выражения переменных, а их оценки, что обозначено на схеме звездочкой «*».
Электропривод с подчиненной системой координат[править | править код]
Схема электропривода с подчиненным регулированием координатДля увеличения точности получаемых оценок переменных состояния может применяться корректирующая обратная связь по управляемой переменной, показанная выше штриховой линией. В данном случае значение выходной управляемой переменной ф сравнивают при помощи обратной связи с ее оценкой ф* и только затем в функции ошибки (выявленного отклонения) Дф корректируют показания отдельных моделей.
Структура с подчиненным управлением координат отличается тем, что в данной структуре регулирование каждой отдельной координаты осуществляется отдельными регуляторами — тока РТ и скорости PC, которые в свою очередь совместно с соответствующими обратными связями формируют замкнутые контуры. Они встраиваются таким образом, что входным, задающим сигналом для внутреннего контура тока U является выходной сигнал внешнего по отношению к нему контура скорости. Исходя из этого, внутренний контур тока зависит от внешнего контура скорости — основной управляемой координате электрического привода.
Главное достоинство схемы изображенной на рисунке заключается в возможности эффективной настройки управления каждой переменной как в статичном, так и в динамичном режимах, в силу чего она представляет из себя в настоящее время основу применение в электроприводе. Кроме того, зависимость контура тока от контура скорости позволяет простыми методами осуществлять ограничение тока и момента, для чего достаточно ограничить на соответствующем уровне сигнал на выходе регулятора скорости (он же — сигнал задания тока)
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
- ↑ 1 2 3 Ильинский Н. Ф. Основы электропривода: Учебное пособие для вузов. — 2-е изд., перераб. и доп. — М.: Издательство МЭИ, 2003. — С. 220. — ISBN 5-7046-0874-4.
- ↑ Электроприводы. Термины и определения.-М.- Издательство стандартов. −1993 [1]
- ↑ Онищенко Г.Б. Электрический привод. — М.: Академия, 2003.
- ↑ Анучин А.С. Системы управления электроприводов. — Москва: Издательский дом МЭИ, 2015. — 373 с. — ISBN 978-5-383-00918-5.
- Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — ISBN 5-7695-2306-9.
- Москаленко, В.В. Электрический привод. — 2-е изд. — М.: Академия, 2007. — ISBN 978-5-7695-2998-6.
- Зимин Е. Н. и др. Электроприводы постоянного тока с вентильными преобразователями. Ленинград, Издательство «Энергоиздат», Ленинградское отделение, 1982
- Чиликин М. Г., Сандлер А. С. Общий курс электропривода. — 6-е изд. — М.: Энергоиздат, 1981. — 576 с.
- Тищенко О. Ф. Элементы приборных устройств. — М.: Высшая школа, 1982. — 263 с.
Привод — Вікіпедія
Матеріал з Вікіпедії — вільної енциклопедії.
При́від, або силовий привід (рос. привод, англ. drive, нім. Antrieb m, Trieb m, Triebwerk n, Steuerung f, Umsteuerung f) — пристрій для приведення в дію різних технологічних машин за допомогою: двигуна, стисненого повітря, рідини або пружин[1].
- За використовуваною енергією розрізняють приводи:
- За характером розподілу енергії, механічний привід буває:
- трансмісійний,
- груповий,
- одиничний (індивідуальний).
- За кількістю двигунів привід можна поділити на однодвигунний та багатодвигунний. Однодвигунний привід є найпоширенішим. Це використання в приводі машини з одним робочим органом одного двигуна. Багатодвигунний привід широко застосовується у тих машинах, що споживають значну потужність або мають декілька робочих органів. У багатьох випадках кожен із робочих органів, залежно від виконуваної роботи, може приводитись у дію різними за видом підведеної енергії двигунами.
- Додатково можна виділити такий вид привода, як взаємопов’язаний, що складається з двох або більше двигунів, котрі забезпечують виконання одного механічного руху виконавчим механізмом окремими робочими органами машини (наприклад, привод конвеєрної стрічки, ескалатор тощо). Для синхронізації руху двигунів взаємозв’язаних приводів слід використовувати спеціальні схеми зв’язку за потоками первинної енергії. Якщо це електричні приводи, то подібні схеми зв’язку будують за системою електричного валу.
- За способом передачі руху від двигуна до виконавчого механізму, розрізняють приводи прямої дії (безредукторні) і приводи з передавальними механізмами, які призначені для узгодження параметрів руху валу двигуна з параметрами руху ведучої ланки виконувального механізму.
- У гірничій справі, використовують практично всі види приводів, найчастіше — електропривід.
В електротехніці, насамперед, застосовують пневматичні, пружинні або електромагнітні приводи.
Привід автомобіля[ред. | ред. код]
В автомобільній техніці приводом називається система, що складається двигуна і пристроїв для передачі крутного моменту на колеса. Залежно від конструкції розрізняють такі типи привода:
У ДСТУ 3321:2003 пропонують для використання в технічній та нормативній документації термін урухомник. Стандарти: ДСТУ 2313-93. ЕЛЕКТРОПРИВОДИ. Терміни та визначення.,ДСТУ EN 60204-1:2015 БЕЗПЕЧНІСТЬ МАШИН ЕЛЕКТРООБЛАДНАННЯ МАШИН, ДСТУ 3729 – 98 Приводи гальмівні пневматичні. Терміни та визначення., рекомендують термін привід, електропривід. Інші джерела використовують назви привод, та похідні слова.
До часу «уніфікації» технічної термінології в СРСР, існував термін «повідня́» з наголосом на останньому складі:
- повідня махови́чна;
- п. стельова́;
- п. пускова;
- п. пасова́;
- п. самозупи́нна;
- п. самогальмівна́;
- п. ви́лична;
- електроповідня́;
- повідня́-замика́ч (-ча́)[2].
- ↑ Російський термін привод перекладається у російсько-українському політехнічному словнику Лінґво® як повідня́, по́гін, тягло́, по́від
- ↑ Шелудько І., Садовський Т. Російсько-український словник технічної термінології. — К.: Держвидав України, 1928.
- Попов С.В., Бучинський М.Я., Гнітько С.М., Чернявcький А.М. Теорія механізмів технологічних машин: підручник для студентів механічних спеціальностей закладів вищої освіти. Харків: НТМТ, 2019. 268 с.
Векторное управление электродвигателем «на пальцах» / НПФ ВЕКТОР corporate blog / Habr
— Что такое векторное управление?— Держать ток под 90 градусов.
Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно вот такие вот попытки как-то закрутить двигатель без использования мат.части. Но на самом деле векторное управление – это очень просто, если понимать принцип его работы «на пальцах». А там уже и с формулами разбираться в случае надобности будет веселее.
Рассмотрим принцип работы самого простого двигателя переменного тока – синхронной машины с постоянными магнитами. Удобный пример – компас: его магнитная стрелка представляет из себя ротор синхронной машины, а магнитное поле Земли – магнитное поле статора. Без внешней нагрузки (а в компасе её нет, если не считать трение и жидкость, гасящую колебания стрелки) ротор всегда ориентируется по полю статора. Если мы будем держать компас и вращать под ним Землю, то стрелка будет крутиться вслед, совершая работу по перемешиванию жидкости внутри компаса. Но есть и чуть более простой способ – можно взять внешний магнит, например, в виде стержня с полюсами на концах, поле которого значительно сильнее магнитного поля Земли, поднести его к компасу сверху и вращать магнит. Стрелка будет двигаться вслед за вращающимся магнитным полем. В настоящем синхронном двигателе поле статора создается электромагнитами – катушками с током. Схемы обмоток там сложные, но принцип один – они создают статором магнитное поле, направленное в нужную сторону и имеющее нужную амплитуду. Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
Рисунок 1. Принцип действия синхронной электрической машины
Магнитный поток катушки пропорционален току в ней (в первом приближении). Нас будет интересовать магнитный поток от статора в том месте, где расположен ротор, т.е. в центре рисунка (краевыми эффектами, рассеянием и всем прочим пренебрегаем). Магнитные потоки двух перпендикулярно расположенных катушек векторно складываются, образуя для взаимодействия с ротором один общий поток. Но так как поток пропорционален току в катушке, удобно рисовать непосредственно вектора токов, сонаправив их с потоком. На рисунке показаны некоторые токи Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке ротор расположен в произвольном положении, но из этого положения ротор будет стремиться повернуться согласно магнитному потоку статора, т.е. по вектору Is (положение ротора в этом случае показано пунктирной линией). Соответственно, если подать ток только в фазу α, скажем, Iα = 1А, ротор встанет горизонтально, а если в β, вертикально, а если приложить Iβ = -1А то перевернется на 180 градусов. Если запитать ток Iα по закону синуса, а Iβ по закону косинуса от времени, то будет создано вращающееся магнитное поле. Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
Давайте нарисуем график момента двигателя в зависимости от углового положения вала ротора и вектора тока Is статора – угловую характеристику синхронного двигателя. Эта зависимость синусоидальная (Рисунок 2).
Рисунок 2. Угловая характеристика синхронной машины (здесь есть некоторая историческая путаница со знаками момента и угла, из-за чего часто рисуют характеристику перевернутой относительно горизонтальной оси).
Чтобы получить этот график на практике, можно поставить на вал ротора датчик вращающего момента, затем включить любой вектор тока, например, просто подать ток в фазу α. Ротор повернется в соответствующее положение, которое нужно принять за ноль. Потом через датчик момента «руками» нужно поворачивать ротор, фиксируя на графике в каждой точке угол θ, на который повернули, и момент, который показал датчик. Т.е. нужно растягивать «магнитную пружину» двигателя через датчик момента. Самый большой момент окажется при угле в 90 градусов от вектора тока (от начала). Амплитуда получившегося максимального момента Ммакс пропорциональна амплитуде приложенного вектора тока. Будет приложен 1А, получим, скажем, Ммакс = 1 Н∙м (ньютон*метр, единица измерения вращающего момента), если подадим 2А, получим Ммакс = 2 Н∙м.
Из этой характеристики следует, что двигатель развивает наибольший момент, когда ротор находится под 90° к вектору тока. Так как мы при создании системы управления на микроконтроллере хотим получить от двигателя наибольший момент при минимуме потерь, а потери, в первую очередь, это ток в обмотках, то рациональнее всего ставить вектор тока всегда под 90° к магнитному полю ротора, т.е. перпендикулярно магниту на рисунке 1. Нужно поменять всё наоборот – не ротор едет к задаваемому нами вектору тока, а мы задаем вектор тока всегда под 90° к ротору, как бы он там не вращался, т.е. «прибить» вектор тока к ротору. Регулировать же момент двигателя будем амплитудой тока. Чем больше амплитуда – тем выше момент. А частота вращения, частота тока в обмотках это уже «не наше» дело – какая получится, как ротор будет вращаться, так и будет – мы управляем моментом на валу. Как ни странно, именно это и называется векторным управлением – когда мы управляем вектором тока статора так, чтобы он был под 90° к магнитному полю ротора. Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Но как векторное управления достигается на практике? Очевидно, для начала понадобится знать положение ротора, чтобы было относительно чего отмерять 90°. Это проще всего сделать установив, собственно, датчик положения на вал ротора. Потом нужно разобраться, как создать вектор тока, поддерживая желаемые токи в фазах α и β. На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение.
Поддерживать ток микроконтроллером можно использовав программный ПИ (пропорционально-интегральный) регулятор тока и ШИМ. Например, структура с регулятором тока для одной фазы α показана ниже (Рисунок 3).
Рисунок 3. Замкнутая по току структура управления для одной фазы
Здесь задание тока iα_зад – некая константа, тот ток, который мы хотим поддерживать для этой фазы, например 1А. Задание поступает на сумматор регулятора тока, раскрытая структура которого показана выше. Если читатель не знает, как работает ПИ-регулятор – то увы и ах. Могу лишь посоветовать что-то из этого. Регулятор тока на выходе задает напряжение фазы Uα. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это Uα. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Дальше, возможно, некоторые читатели уже подумали, что до векторной структуры управления осталось дело за малым – нужно поставить два регулятора тока, на каждую фазу по регулятору, и формировать на них задание в зависимости от угла с датчика положения ротора (ДПР), т.е. сделать что-то типа такой структуры (Рисунок 4):
Рисунок 4. Неправильная (наивная) структура векторного управления
Так делать нельзя. При вращении ротора переменные iα_зад и iβ_зад будут синусоидальными, т.е. задание на регуляторы тока будет всё время меняться. Быстродействие регулятора не бесконечно, поэтому при изменении задания он не мгновенно его отрабатывает. Если задание постоянно менять, то регулятор будет всё время его догонять, никогда не достигая. И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
Рисунок 5. Структура векторного датчикового управления для двухфазной синхронной машины
Здесь добавились два блока – БКП_1 и БКП_2: блоки координатных преобразований. Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ, а БКП_2 на —ϴ. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям d и q, привязанных к ротору двигателя (используя для этого угол положения ротора ϴ). А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Рисунок 6. Координатные преобразования из неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям осям d и q, привязанных к ротору
То есть вместо «вращения» задания регуляторов (как было в прошлой структуре), вращаются их входы и выходы, а сами регуляторы работают в статическом режиме: токи d, q и выходы регуляторов в установившемся режиме постоянны. Оси d и q вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси q регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток d сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Для линейного движения пусть это будет, например, городской автобус. Он всё время то разгоняется, то тормозит, то едет назад и вообще ведёт себя как хочет: это ротор двигателя. Также есть вы на автомобиле рядом, едете параллельно: ваша задача быть ровно посредине автобуса: «держать 90°», вы – это регуляторы тока. Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Приведенная выше структура действительно работает и используется в современных электроприводах. Только в ней не хватает целой кучи мелких «улучшалок», без которых её уже не принято делать, типа компенсации перекрестных связей, разных ограничений, ослабления поля и т.п. Но базовый принцип именно такой.
А если нужно регулировать не момент привода, а всё-таки скорость (по правильному угловую скорость, частоту вращения)? Ну тогда ставим еще один ПИ-регулятор – регулятор скорости (РС). На вход подаем задание скорости, а на выходе имеем задание момента. Так как ток оси q пропорционален моменту, то можно для упрощения выход регулятора скорости подать сразу на вход регулятора тока оси q, вот так (Рисунок 7):
Рисунок 7. Регулятор скорости для векторного управления
Здесь ЗИ – задатчик интенсивности, плавно изменяет свой выход, чтобы двигатель разгонялся с нужным темпом, а не гнал на полном токе до задания скорости. Текущая частота вращения ω взята из обработчика датчика положения ротора, так как ω это производная от углового положения ϴ. Ну или можно просто время между импульсами датчика засекать…
Как сделать тоже самое для трехфазного двигателя? Ну, собственно, ничего особенного, добавляем еще один блок и меняем модуль ШИМ (Рисунок 8).
Рисунок 8. Структура векторного датчикового управления для трехфазной синхронной машины
Трехфазные токи, точно так же как и двухфазные, служат для одной цели – создать вектор тока статора Is, направленный в нужную сторону и имеющий нужную амплитуду. Поэтому трехфазные токи можно просто пересчитать в двухфазные, а дальше оставить ту же систему управления, что уже была собрана для двухфазной машины. В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, эта операция производится блоком фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Рисунок 9. Фазные преобразования – из трех фаз к двум. Для удобства принимаем равенство амплитуды вектора Is амплитуде тока в фазе
Думаю, комментарии не нужны. Немного слов про ток фазы C. Туда можно не ставить датчик тока, так как три фазы двигателя соединены в звезду, и по закону Кирхгофа всё, что втекло через две фазы, должно вытечь из третьей (если, конечно, у вас в двигателе не пробита изоляция, и половина не утекла куда-то на корпус), поэтому ток фазы C вычисляют как скалярную сумму токов фаз A и B со знаком минус. Хотя третий датчик иногда ставят чтобы снизить погрешность измерений.
Также нужна полная переделка модуля ШИМ. Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё ещё в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
Посчитаем. Пусть у вас есть классический преобразователь частоты, питающийся от промышленной трехфазной сети 380В 50Гц. Здесь 380В это линейное (между фазами) действующее напряжение. Так как в преобразователе стоит выпрямитель, он выпрямит это напряжение и на шине постоянного тока окажется напряжение, равное амплитудному линейному напряжению, т.е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т.е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
Рисунок 10. Изменение потенциалов фаз для скалярной и векторной ШИМ
Кстати, а какие датчики положения используются для векторного управления? Чаще всего используются четыре типа датчиков. Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик.
Квадратурный энкодер не выдает абсолютного положения ротора – по своим импульсам он позволяет лишь определить, сколько вы проехали, но не куда и откуда (как начало и конец связаны с расположением магнита ротора). Поэтому для векторного управления синхронной машиной сам по себе он не подходит. Немного спасает ситуацию его реперная метка (индекс) – она одна на механический оборот, если до неё доехать, то абсолютное положение становится известно, а от неё можно уже отсчитывать сколько проехали квадратурным сигналом. Но как до этой метки доехать в начале работы? В общем, это не всегда удобно.
Датчик на основе элементов Холла – это грубый датчик. Он выдает всего несколько импульсов на оборот (в зависимости от кол-ва элементов Холла, для трехфазных двигателей их обычно три, т.е. шесть импульсов), позволяя знать положение в абсолютной величине, но с низкой точностью. Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
Рисунок 11. Работа датчика положения на элементах Холла для трехфазной машины и экстраполяция его сигнала
Часто для серводвигателей используется сочетание энкодера и датчика Холла. В этом случае можно сделать единый программный модуль их обработки, убирая недостатки обоих: делать экстраполяцию угла, приведенную выше, но не по времени, а по меткам с энкодера. Т.е. внутри от фронта до фронта датчика Холла работает энкодер, а каждый фронт Холла чётко инициализирует текущее абсолютное угловое положение. В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В еще более дорогих применениях используют абсолютный датчик положения с цифровым интерфейсом (абсолютный энкодер), который сразу выдает абсолютное положение и позволяет не испытывать описанных выше проблем.
Если в электродвигателе очень жарко, а также когда требуется повышенная точность измерения угла, используют «аналоговый» сельсинный датчик (резольвер, вращающийся трансформатор). Это маленькая электрическая машина, используемая как датчик. Представьте, что в рассмотренной нами синхронной машине на рисунке 1 вместо магнитов стоит еще одна катушка, на которую мы подаем высокочастотный сигнал. Если ротор стоит горизонтально, то сигнал наведется только в катушку статора фазы α, если вертикально – то только в β, если перевернуть его на 180 – то изменится фаза сигнала, а в промежуточных положениях наводится и туда и сюда по закону синуса/косинуса. Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Есть еще много экзотических датчиков положения, особенно для сверхвысокоточных применений, например, для изготовления электронных чипов. Там в ход идут уже любые физические явления, чтобы только узнать положение наиболее точно. Их рассматривать не будем.
Как вы поняли, векторное управление достаточно требовательное – и датчиков положения ему наставь, и датчиков тока, и ШИМ ему векторную, и микроконтроллер не абы какой, чтобы всю эту математику обсчитывать. Поэтому для простых применений его упрощают. Для начала можно исключить датчик положения, сделав бездатчиковое векторное управление. Для этого используют немного больше математической магии, находящейся в желтом прямоугольнике (Рисунок 12):
Рисунок 12. Структура бездатчикового векторного управления
Наблюдатель – это такой блок, на который подается информация о приложенном к двигателю напряжении (например, из задания на модуль ШИМ) и о токах в двигателе с датчиков. Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т.п.
Есть и другой вариант упрощения. Например, можно сделать так называемую «автокоммутацию». В этом случае для трехфазного двигателя отказываются от сложного метода ШИМ, отказываются от сложной векторной структуры и начинают просто включать фазы двигателя по датчику положения на элементах Холла, даже иногда без всякого токоограничения. Ток в фазах получается не синусоидальный, а трапецеидальный, прямоугольный или еще более искаженный. Но стараются сделать так, чтобы средний вектор тока был всё равно под 90 градусов к «магниту ротора» выбором момента включения фаз. При этом, включая фазу под напряжение, неизвестно, когда же в фазе двигателя нарастет ток. На низкой частоте вращения он это делает быстрее, на высокой, где мешает ЭДС машины, медленнее, еще темп нарастания тока зависит от индуктивности двигателя и т.п. Поэтому, даже включая фазы точно в нужный момент времени, совсем не факт, что средний вектор тока окажется в нужном месте и с нужной фазой – он может как опережать, так и запаздывать относительно оптимальных 90 градусов. Поэтому в таких системах вводят настройку «опережения коммутации» – по сути просто время, насколько раньше нужно на фазу двигателя подавать напряжение, чтобы в итоге фаза вектора тока получилась более близка к 90 градусам. По-простому это называют «настройка таймингов». Так как ток в электродвигателе при автокоммутации не синусоидальный, то, если взять рассмотренную выше синусоидальную машину и управлять ей таким вот образом, момент на валу будет пульсировать. Поэтому в двигателях, предназначенных для автокоммутации, часто специальным образом меняют магнитную геометрию ротора и статора, чтобы они стали более подходящими к такому типу управления: ЭДС таких машин делают трапецеидальной, благодаря чему в режиме автокоммутации они работают лучше. Синхронные машины, оптимизированные для автокоммутации, получили название бесколлекторных двигателей постоянного тока (БДПТ) или по-английски BLDC (Brushless Direct Current Motor). Режим автокоммутации также часто называют вентильным режимом, а двигатели с ним работающие – вентильные. Но это всё просто разные названия, ничем не влияющие на суть (но матёрые электроприводчики часто страдают СПГС в вопросах, связанных с этими названиями). Есть неплохое видео, иллюстрирующее принцип работы таких машин. На нем показан обращенный двигатель, где ротор снаружи, а статор внутри:
А вот здесь есть курс статей по таким двигателям и аппаратной части системы управления.
Можно пойти даже на еще большее упрощение. Коммутировать обмотки так, чтобы одна фаза всё время оказывалась «свободна» и к ней не прикладывался ШИМ. Тогда в ней можно измерять ЭДС (наведенное в катушке фазы напряжение), и, когда это напряжение переходит через ноль, использовать это как сигнал датчика положения ротора, потому что фаза этого наведенного напряжения зависит как раз от положения ротора. Получается бездатчиковая автокоммутация, что широко используется в различных простеньких приводах, например, в «регуляторах» для пропеллеров авиамоделей. При этом надо помнить, что ЭДС машины появляется только на относительно высокой частоте вращения, поэтому для старта такие системы управления просто не спеша перебирают фазы, надеясь, что ротор двигателя будет следовать за подаваемым током. Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т.п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Но иногда делают даже и еще большее упрощение. Можно совсем отказаться от микроконтроллера, ключей, датчиков положения и прочего, осуществляя переключение фаз специальным механическим коммутатором (Рисунок 13):
Рисунок 13. Механический коммутатор для переключения обмоток
При вращении ротор сам переключает свои части обмоток, меняя приложенное к ним напряжение, при этом ток в роторе протекает переменный. Коммутатор располагают таким образом, чтобы магнитный поток ротора и статора снова оказывался близким к 90 градусам, дабы достичь максимума момента. Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Все электрические машины работают схожим образом. В теории электропривода даже существует понятие «обобщенная электрическая машина», к которой сводят работу других. Показанные в статье объяснения «на пальцах» никоим образом не могут служить практическим руководством к написанию кода микроконтроллера. В статье рассмотрен хорошо если один процент информации, которая требуется для реализации настоящего векторного управления. Чтобы сделать что-то на практике, нужно, во-первых, знать ТАУ, хотя бы на уровне понимания, как работает ПИ-регулятор. Потом нужно всё-таки изучить математическое описание как синхронной машины, так и синтеза векторного управления. Также изучить векторную ШИМ, узнать, что такое пары полюсов, познакомиться с типами обмоток машин и прочее. Это можно сделать в свежей книге «Анучин А. С. Системы управления электроприводов. МЭИ, 2015», а также в «Калачев Ю. Н. Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения. Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в нашей статье Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье Способы отладки ПО микроконтроллеров в электроприводе. Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Продолжение статьи, где рассказано про асинхронные двигатели здесь.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
ПРИВОД — это… Что такое ПРИВОД?
Привод — Привод: В механике Привод (тоже самое силовой привод) совокупность устройств, предназначенных для приведения в действие машин. Состоит из двигателя, трансмиссии и системы управления. Различают привод групповой (для нескольких машин) и… … Википедия
привод — и привод. В знач. «действие по знач. глаг. «приводить»» (принудительно доставлять обвиняемого, свидетеля) привод, мн. приводы, род. приводов. Привод в милицию. В знач. «устройство для приведения в движение какого либо механизма» привод, мн.… … Словарь трудностей произношения и ударения в современном русском языке
привод — Устройство для приведения в действие машин и механизмов. Примечание Привод состоит из источника энергии, механизма для передачи энергии (движения) и аппаратуры управления. Источником энергии служит двигатель (тепловой, электрический,… … Справочник технического переводчика
привод — машины; привод Система, состоящая из двигателя и связанных с ним устройств для приведения в движение одного или нескольких твердых тел, входящих в состав машины. привод робота; привод Часть исполнительного устройства робота, предназначенная для… … Политехнический терминологический толковый словарь
ПРИВОД — ПРИВОД, а, муж. 1. см. привести. 2. Принудительное доставление в органы дознания или в суд не явившегося по вызову лица, а также временный арест для допроса (офиц.). П. в милицию. II. ПРИВОД, а и ПРИВОД, а, муж. Устройство или система устройств… … Толковый словарь Ожегова
привод — ПРИВОД, а, муж. 1. см. привести. 2. Принудительное доставление в органы дознания или в суд не явившегося по вызову лица, а также временный арест для допроса (офиц.). П. в милицию. II. ПРИВОД, а и ПРИВОД, а, муж. Устройство или система устройств… … Толковый словарь Ожегова
ПРИВОД — (Gear) механизм для передачи вращательного движения из одного места в другое. Бывает привод ременный, зубчатый и пр. Самойлов К. И. Морской словарь. М. Л.: Государственное Военно морское Издательство НКВМФ Союза ССР, 1941 … Морской словарь
привод — передача, движитель; препровождение, пригон, допрос, доставление Словарь русских синонимов. привод сущ., кол во синонимов: 19 • бензопривод (1) • … Словарь синонимов
ПРИВОД — устройство, состоящее из источника энергии, передающих энергию (движение) механизмов и системы (приборов) управления для приведения в движение транспортных машин, различных станков и механизмов млн. их торможения. Источниками энергии (движения)… … Большая политехническая энциклопедия
ПРИВОД — принудительное препровождение (доставление) органами милиции (полиции) обвиняемого, подсудимого, подозреваемого, свидетеля и некоторых других лиц в суд, в органы дознания, к прокурору или следователю в случае их неявки (без уважительной причины)… … Юридический словарь