Инновационный гусеничный робот от израильских разработчиков (3 фото + видео) » 24Gadget.Ru :: Гаджеты и технологии
Инженеры из университета Бен-Гуриона не устают выпускать оригинальные полезные устройства, способные полностью изменить традиционные средства передвижения и управления. Последней такой разработкой стал робот на гусеничном ходу, в котором особенности сцепления между звеньями гусениц, придающие жесткость, способны разнообразить способы пересечения устройством различных препятствий: пересечение небольших рвов, преодоление невысоких вертикальных препятствий.
В настоящее время тестируемый образец представляет собой одногусеничное устройство со звеньями специальной конструкции. Плоскости соседних звеньев могут смещаться относительно друг друга на угол от -20 до 45 градусов, гарантирующие системе надлежащую гибкость. В движение гусеницы приводятся тремя электромоторами передающими вращение на ролики.
В передней части гусеницы находится специальный механизм, способный блокировать гусеницы, лишая систему гибкости при помощи специальных стопорных штифтов.

При этом попадая в заднюю часть, гусеницы разблокируются при помощи еще одного механизма. Такая конструкция обеспечивает постоянную гибкость для верхней части гусеницы и переменное состояние (гибкое или жесткое) для нижней части. В результате устройство сможет совершать маневры недоступные для традиционных гусеничных механизмов: преодоление небольших рвов или возможность заползти на вертикальное препятствие.
При тестировании возможностей такого механизма было установлено, что при гусеничном устройстве длиной в 50 см, аппарат может взбираться на вертикальные преграды высотой до 20 см. Одногусеничная конструкция пока не позволяет устройству разворачиваться, однако такая проблема решается путем добавления второй гусеницы, что позволит разнообразить маневренность.
Также на следующем этапе испытаний конструкторы планируют добавить автономную систему управления, позволяющую устройству перемещаться по пересеченной местности используя возможности гибких и жестких участков гусеницы.
 Использование гусеничных механизмов с гибридной жёсткостью гусениц возможно для спасательных операций, в сельском хозяйстве, промышленности и конечно же в армии.
Использование гусеничных механизмов с гибридной жёсткостью гусениц возможно для спасательных операций, в сельском хозяйстве, промышленности и конечно же в армии.Источник: spectrum
История постройки гусеничного робота / Хабр
Моя история погружения в изучение робототехники и создание робота с помощью 3d принтера. Ошибки, с которыми я столкнулся и что хотел-бы получить в итоге
Предыстория
Лет 10 назад, на первых курсах университета, узнав о существовании Arduino и научившись заказывать товары из Китая, я заказал себе стартовый набор Arduino Mega и начал, как и все, учиться мигать светодиодом. Я получал дикий восторг от того что могу не только програмировать и получать какие-то решения на экране компьютера, а могу делать какие-то устройства, которыми могу облегчить быт. Начал думать о IOT до того как узнал о таком понятии и время от времени думал чтоб такого полезного реализовать. Первым проектом на Arduino, который я для себя считал оконченным, был контроллер для террариума с пауком.

Обещали супер продвинутое направление, передовые технологии, рассказывали насколько востребованы такие специалисты и заманивали яркими картинками расчетов в Ansys, Solidworks и остальных программных комплексах. На самом деле, сейчас, через 6 лет после окончания ВУЗа, я могу сказать что ни капли не жалею что выбрал данное направление для себя. Много чего конечно было не так как описывалось при поступлении, но на 3 курсе я все-таки дождался предметов, которые мне нравились. Я увлекся изучением CAD систем, на одной из олимпиад получил сертификат CSWA от Solidworks, вообще не напрягаясь и не готовясь к этому.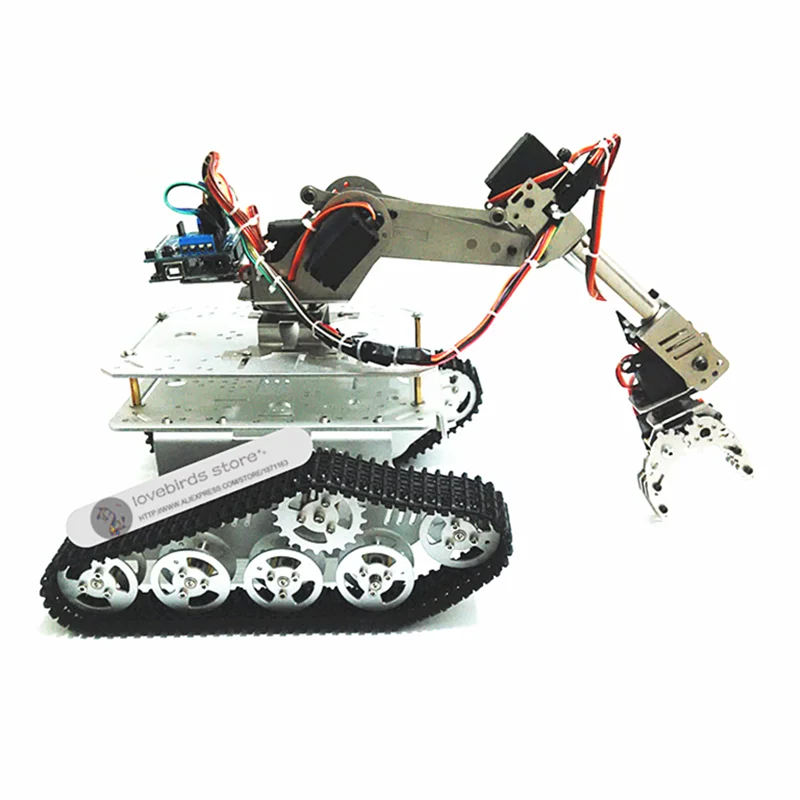

Первые попытки построения робота
Несколько лет назад я все-таки решился и выделил себе бюджет на хобби, купив 3D принтер.
 Фанерный клон Ultimaker сразу же начал допиливаться руками, были доделаны дверцы и короб из акрила для печати ABS, и я стал понимать что с принтером уже можно разрабатывать что-то более серьёзное, движимое и интересное для меня. Помня еще из детства передачи по телевизору с боями роботов я решил, а почему б не сделать себе что-то интересное. Сходил на фестиваль робототехники, загорелся этой идеей еще больше. Начал смотреть проекты роботов на thingiverse и понимал что это все не то, чужие разработки в основном скучные и обычные, отсутствие исходников и все-таки «ЯЖИНЖЕНЕР». Хотелось что-то с необычной механикой, а не просто колесная база. Захотелось реализовать механику подобную роботу при загрузке Solidworks.
Фанерный клон Ultimaker сразу же начал допиливаться руками, были доделаны дверцы и короб из акрила для печати ABS, и я стал понимать что с принтером уже можно разрабатывать что-то более серьёзное, движимое и интересное для меня. Помня еще из детства передачи по телевизору с боями роботов я решил, а почему б не сделать себе что-то интересное. Сходил на фестиваль робототехники, загорелся этой идеей еще больше. Начал смотреть проекты роботов на thingiverse и понимал что это все не то, чужие разработки в основном скучные и обычные, отсутствие исходников и все-таки «ЯЖИНЖЕНЕР». Хотелось что-то с необычной механикой, а не просто колесная база. Захотелось реализовать механику подобную роботу при загрузке Solidworks.Тот самый робот, который стал одним из вдохновителей
Посмотрел подобные конструкции, понял принцип работы и держал в голове мысль сделать что-то похожее. Первой главной ошибкой было решение что все просто, буду постепенно моделировать, печатать и проверять готовую конструкцию, не имея полного представления что и как будет устроенно, как будет управляться, какие модули будут использоваться.

Первый вариант конструкции с напечатанными гусеницами одним ремнем и сервой для проворота передней части гусениц
Первые работы над ошибками
После участия в вебинаре по робототехнике я познакомился с человеком, который занимается разработкой плат и для себя решил что мне проще набросать какое-то ТЗ и получить какое-то решение от человека, который разбирается в проектировании плат и разработке устройств. Параллельно я начал работу над новым корпусом примерно посмотрев на свои косяки в прошлый раз. И тут я очередной раз наступаю на те-же грабли до конца не понимая как будет выглядеть вся электроника, какие у нее будут размеры и как я это все буду размещать. Мы обсудили о том что это будет модульное решение, у меня были некоторые платы, например драйверов двигателей, батареи и я начал заново моделировать проект, но уже полностью вырисовывая каждую плату с посадочными отверстиями, выходами проводов, радиаторами и т.д. чтоб опять не столкнуться с проблемой нехватки места.
 На самом деле я был ограничен размерами области печати в 200*200*200мм и этот вариант корпуса я пытался сделать вообще из одной детали, на печать которой уходило около 400г пластика и несколько суток печати.
На самом деле я был ограничен размерами области печати в 200*200*200мм и этот вариант корпуса я пытался сделать вообще из одной детали, на печать которой уходило около 400г пластика и несколько суток печати.После нескольких попыток с появляющимися на вторые сутки трещинами, отлипаниями от стола я понял что сборный корпус не такая уж и плохая идея. Процесс переделывания какой-то из деталей занимал бы намного меньше времени и мороки с принтером будет намного меньше. Получив через время комплект разведенных плат со всеми моими пожеланиями я научился работать со сдвиговыми регистрами, мультиплексорами и хоть как-то начал разбираться в непонятных для меня схемах и устройствах. К тому моменту я уже очередной раз полностью переделал механику. Изменил принцип вращения передних «лап» с сервопривода на двигатель с червячным редуктором, Ушел от идеи печатать из резиноподобного эластана ремни для гусениц и переделал их под обычные сборные пластиковые гусеницы, собранные на гвоздях и наклеенными на них протекторах из эластана.
Что есть на данный момент
На выходных в Днепре прошел технический фестиваль Interpipe TechFest, на котором я решил показать людям то что сейчас есть у меня, послушать мнение других и пообщаться с однодумцами. Там я очередной раз услышал о том что можно было б и написать где-то например на Хабре и получить какой-то отзыв от людей.
По факту для меня это платформа, на которой я буду учиться работать с ROS, пытаться ориентироваться в пространстве, отстраивать кару, попробую поработать с твердотельным лидаром, который жду с кикстартера, хочу прикрутить что-то типа стереокамеры realsense. Я понимаю что мозгов малинки мне скорее всего не хватит и со временем я перейду на что-то более мощное.
Я понимаю что мозгов малинки мне скорее всего не хватит и со временем я перейду на что-то более мощное.
Сейчас этот робот может использоваться в качестве «домашнего сторожа». Пока управление устроенно через все то-же приложение Blynk. Он оснащен купольным сенсором движения, камера с возможностью включения/выключения ИК фильтра, ИК подсветка. Активировав с телефона режим охраны, я получаю уведомление на телефон. Могу включить RaspberryPi 3, запустить стримминг, стримминг + запись видео, сделать фото, которые отправляются мне на почту. Могу поехать посмотреть что там происходит дома и вернуться на зарядку на докстанцию.
Самосборная батарея 4s2p из модулей 18650 на 3200mAh каждая дает мне примерно 8 часов езды без подзарядки с всем включенным оборудованием и передачей видео и без какой-либо оптимизации энергосбережения. Пока до этого руки не дошли. С помощью Google TextToSpeach написав в терминал этого приложения, робот озвучивает текст. И это все с любой точки мира где у меня есть подключение к интернету.
Немного «жести» внутри
Так выглядит UI управления на телефоне
Что дальше и зачем я это все пишу
Вообще, целью посещения выставки было найти новые знакомства с однодумцами, готовыми начать что-то делать связанное с робототехникой. Мне надоело работать просто программистом, писать десктопные приложения, это уже не так круто как казалось когда-то и я считаю что это направление постепенно загибается. Вместо того чтоб переучиваться на WEB разработку я решил кардинально поменять направление и связать свою жизнь с робототехникой и IOT, которые мне действительно нравятся. Для себя я решил что работая на работе, не связанной с этим направлением у меня не хватает на все времени. Я должен выбирать между тем что нужно и тем что нравится и хочется, подкопил немного денег, ушел с работы и начал все это изучать.
У меня есть несколько задумок на тему робототехники, основная из которых связана с сельским хозяйством, основанная на компьютерном зрении, картах глубины, распознавании объектов и т. д. Я понимаю что работы очень много и сейчас я только начал разбираться с ROS. У меня есть знания в инженерии, умения работать с CAD/CAE системами и в принципе все реально сделать и самому, но понимая сколько работы нужно сделать по механике, разработке, просчетам и полностью научиться работать с ROS, картами глубины, сенсорами, ориентировании в пространстве и довести это все до ума самому будет очень сложно. Поэтому я ищу несколько человек. которые готовы серьезно заняться работой над этим стартапом и стать одними из сооснователей. Само собой я не могу обещать, что все будет круто и через пол года наш стартап будет приносить нам кучу денег, но пока эта ниша не переполнена можно пробовать что-то реализовать на уровне первого прототипа и с ним уже выходить на акселераторы, краудфандинговые площадки и как-то рекламировать себя.
д. Я понимаю что работы очень много и сейчас я только начал разбираться с ROS. У меня есть знания в инженерии, умения работать с CAD/CAE системами и в принципе все реально сделать и самому, но понимая сколько работы нужно сделать по механике, разработке, просчетам и полностью научиться работать с ROS, картами глубины, сенсорами, ориентировании в пространстве и довести это все до ума самому будет очень сложно. Поэтому я ищу несколько человек. которые готовы серьезно заняться работой над этим стартапом и стать одними из сооснователей. Само собой я не могу обещать, что все будет круто и через пол года наш стартап будет приносить нам кучу денег, но пока эта ниша не переполнена можно пробовать что-то реализовать на уровне первого прототипа и с ним уже выходить на акселераторы, краудфандинговые площадки и как-то рекламировать себя.
Также я готов к рассмотрению предложений в данном направлении. Готов работать с кем-то над чьим-то стартапом, или не обязательно стартапом а просто разработками какой-то компании но в интересном для меня направлении.
Поэтому хотелось бы услышать какие-либо комментарии по этому поводу. Возможно все-таки это кого-то заинтересует. Сам я территориально проживаю в г.Днепр, Украина. Соответственно было б правильней работать над одним проектом в относительной близости хотя б в сотнях километров а не тысячах, но рассматриваются все варианты.
Если есть какие-то вопросы об устройстве моего данного робота готов ответить и обсудить. Так-же на странице facebook есть несколько видео работы робота и его преодоление препятствий
Если что меня всегда можно найти здесь, на facebook или написать мне на почту [email protected]
Робот исследователь на гусеничном ходу
Дистанционно управляемый комплекс для проведения инженерной, радиационной, химической разведки и поиска радиоактивных источников
Состав:
Универсальный пост управления, роботизированная платформа повышенной проходимости, ходовые видеокамеры, видеокамера высокой четкости с 24-х кратным оптическим зумом, камерой ночного видения, опции: тепловизор, гамма-локатор, видеокамера высокой радиационной стойкости, система АСКРХО (автоматизированная система контроля радиационной, химической обстановки), направленная антенна с автотрекером, щетки, грейферы.
Возможна установка дополнительного навесного оборудования и т.д.
Тактико-технические характеристики:
- габариты (длина х ширина х высота, мм) – 1000 х 500 х 400;
- скорость перемещения – до 10 км/ч;
- грузоподъемность дополнительного
- оборудования – до 30 кг.;
- преодоление вертикальных препятствий высотой до 20 см;
- преодоление лестничных маршей шириной более 0.6 м;
- преодоление лестничных маршей с наклоном до 30 градусов;
- преодоление подъемов min 50 градусов;
- преодоление рыхлого снежного покрова – до 10 см;
- передвижение внутри зданий и сооружений;
- масса с установленным оборудованием – 57 кг;
- передвижение по пересеченной местности;
- дальность управления – до 1 км без автотрекера;
- цифровая система передачи данных – до 20 км;
- система цифрового мониторинга и автоматического управления;
- запас хода без подзарядки – до 10 часов.
Применение
- ведение инженерной, радиационной и химической разведки (опасные производства)
- дистанционная установка датчиков АСКРХО в заданных районах
- поиск людей в задымленных помещениях и опасных средах
- патрулирование контролируемой зоны вокруг охраняемых объектов
- обследование внутренних помещений после ЧС
- обследование сомнительных и взрывоопасных предметов
Срок поставки: 3-6 месяцев
Цена договорная
Мягкое гусеничное шасси увеличило проходимость робота
Masashi Aono / YouTube
Японская компания Amoeba Energy представила робота с мягким гусеничным шасси. Это позволяет ему забираться на высокие препятствия, к примеру, на лестницы с большим уклоном, причем даже на винтовые. Компания продемонстрировала робота на конференции ICRA 2019 и планирует начать производство его новой версии в 2020 году, сообщает New Atlas.
Это позволяет ему забираться на высокие препятствия, к примеру, на лестницы с большим уклоном, причем даже на винтовые. Компания продемонстрировала робота на конференции ICRA 2019 и планирует начать производство его новой версии в 2020 году, сообщает New Atlas.
Обычно для роботов и других машин, предназначенных для труднопроходимых условий, инженеры применяют либо гусеничную платформу, либо конструкцию шагохода. Гусеничные роботы имеют более простую в создании и управлении конструкцию, но не всегда могут преодолевать большие относительно их размера препятствия. Их проходимость напрямую зависит не только от самой конструкции робота, но и от рельефа на гусеницах, а также площади их контакта с препятствием.
Инженеры из компании Amoeba Energy выбрали для своего гусеничного робота необычную конструкцию, обеспечивающую большую площадь контакта гусениц с поверхностью. Они выполнены из мягкого этилен-пропиленового каучука. Каждая из гусениц состоит из основания и выступающих над ним прямоугольных блоков. Во время движения блоки сжимаются и зацепляются за препятствия.
Во время движения блоки сжимаются и зацепляются за препятствия.
Разработчики показали, что робот способен подниматься и спускаться даже по высоким лестницам с большим уклоном. Инженеры уже работают над созданием новой версии, адаптированной для серийного производства и практического использования. Робот будет автономным и получит отсек для грузов. Он сможет перевозить в закрытом отсеке груз массой до шести килограммов. Ожидается, что производство робота начнется в 2020 году.
Ранее американские инженеры создали сжимаемое колесное шасси, в котором колеса приводятся в движение множеством пневматических камер. Кроме того, мягкие роботы используются не только для увеличения проходимости, но и для безопасного взаимодействия с человеком. В 2016 году ученые из Гарварда совершили прорыв в этой области и создали первого полностью мягкого робота, в котором не используются жесткие компоненты. Его работа обеспечивается логической схемой, состоящих из микрофлюидных каналов, по которым проходят жидкости и газы.
Его работа обеспечивается логической схемой, состоящих из микрофлюидных каналов, по которым проходят жидкости и газы.
Григорий Копиев
Робототехнический конструктор Ultimate Robot Kit V2.0
Makeblock ULTIMATE ROBOT KIT является самым полным представителем среди всей линейки моделей. Полноценное научное пособие для домашнего и школьного применения обладает огромным количеством инновационных характеристик, среди которых имеются:
- Все необходимое для строительства, поэтому Вам не придется искать дополнительный набор инструментов, чтобы собрать конструктор.
- Контроллер, оптимизированный на коде ARDUINO, позволяет управлять механизмом на приличных расстояниях, заставляя его выполнять разнообразные действия.
- Всего насчитывается 10 допустимых строительных форм, каждая из которых относится к определенной сфере применения (захват, перевозка предметов и так далее).

Представленная модель является не простой игрушкой, а полноценным учебным пособием, которое способно познакомить каждого желающего с основами программирования и создания робототехники. Имеющиеся в комплекте инструкции написаны доступным языком, а также замечательно проиллюстрированы для того, чтоб Вы смогли воплотить каждую из 10-ти доступных базовых вариаций. Подобный конструктор подойдет также и опытным сборщикам, которые хотят разработать робота своей мечты и испытать его в действии.
Каждая деталь в наборе изготовлена из прочного алюминия, что обеспечивает конструкции практически неограниченный срок эксплуатации, требуя лишь периодической замены батареек. Все элементы окрашены в нейтральный голубой цвет, который интересно сочетается не только с внутренними электронными механизмами, но и со светодиодными лентами, переливающимися разнообразными цветами.
Каждая модель обладает уникальным дизайном, начиная от подобия строительного крана, заканчивая полноценным спортивным болидом, который способен разгоняться до впечатляющих скоростей.
Функциональные возможности Makeblock ULTIMATE ROBOT KIT:
- Представленный конструктор не только пошагово знакомит с основами механики, но также и с азами программирования, обладая полноценной совместимостью с ADRUINO, а также множеством графических редакторов.
- Сборка электронных составляющих производится без использования паяльника. Все приводы и механизмы в наборе поставляются заведомо собранными, что обеспечивает им максимальную надежность, функциональность и простоту.
- Простое подключение позволяет приступить к игре сразу же после сборки. Контроль робота посредством смарт-устройства является наиболее удобным, поскольку соединение по Bluetooth версии 4.0 отличается предельной стабильностью в плане связи. Такую игрушку можно с комфортом использовать даже на улице, не нося при этом габаритных джойстиков или других видов контроллеров, присущих устройствам дистанционного управления.
- Полная совместимость с системой MBLOCK (работающей на коде Scratch 2.
 0) позволяет составлять определенные алгоритмы графического ориентирования. Это значит, что Вы сможете самостоятельно задать роботу траекторию движения, по которой он будет переносить определенные блоки. Интерактивное представление «трассы» гораздо проще в освоении.
0) позволяет составлять определенные алгоритмы графического ориентирования. Это значит, что Вы сможете самостоятельно задать роботу траекторию движения, по которой он будет переносить определенные блоки. Интерактивное представление «трассы» гораздо проще в освоении.
- В комплекте с конструктором прилагается специальная программа MAKEBLOCK, которая работает на уже готовом коде. Именно она выполняет управляющую функцию всех 10-ти моделей, устанавливаясь на Ваше портативное устройство мобильной периферии.
Возрастная аудитория набор практически не ограничивается никакими рамками, поскольку работать с такой игрушкой будет интересно, как детям от 8 лет, так и взрослым. В некоторых школах представленный набор поставляется, как полноценное научное пособие, позволяющее в кратчайшие сроки познакомить ребенка с азами радиомеханики, конструирования, а также программирования. Наличие доступных и понятных схем превращает игру в сплошное удовольствие, поскольку все принципы работы описаны и проиллюстрированы.
Технические характеристики:
- Механические части
- алюминиевый профиль
- пластиковые шестерни для ремня 90Т
- колёса и гусеницы
- кабели
- прочие принадлежности
- Электроника
- Mega Pi
- Плата Mega Pi <-> RJ25
- Модуль Bluetooth
- Драйверы двигателя — 4 шт
- Двигатели с энкодером — 3 шт
- Ультразвуковой датчик расстояния
- Датчик отслеживания линии
- Трехосевой акселерометр и гиродатчик
- Адаптер RJ25
- Адаптер управления затвором фотоаппарата
- Захват
- Возможные конструкции — более 10 (к трём прилагается руководство на бумаге)
- Программирование
- графическое
- Arduino
- Python
- Node JS
Технические характеристики контроллера Mega Pi:
- Микроконтроллер — ATmega2560-16AU
- Напряжение питания — 6.
 ..12 В постоянного тока
..12 В постоянного тока - Рабочее напряжение — 5 В
- Порты ввода-вывода — 43
- Последовательные порты — 3
- Интерфейс I2C
- Интерйефс SPI
- Аналоговые входы — 15
- Ток на порту — 20 мА
- Память FLASH — 256 кб
- Память SRAM — 8 кб
- Память EEPROM — 4 кб
- Частота — 16 МГц
- Размеры — 85 х 63 мм
Цветовая маркировка портов платы Mega Pi определяет их назначение:
- красный — силовой выход
- жёлтый — ввод-вывод
- синий — интерфейс беспроводной связи
- чёрный — общий
- зелёный — силовой выход
Возможные для построения стандартные конструкции роботов:
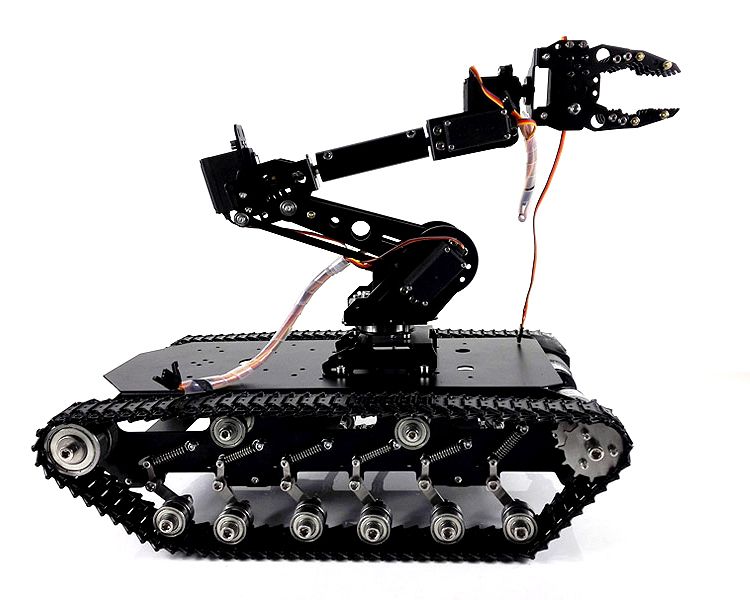
Роботизированная рука на гусеничном ходу
Гусеничные шасси позволяют легко преодолевать препятствия, а привод захвата — поднимать и перемещать предметы.
Робот-бармен
Роботизированный бармен создан на мобильном шасси с поддержкой бутылки с напитком с возможностью наклона. Он может налить лимонад в стакан и привезти его вам.
Он может налить лимонад в стакан и привезти его вам.
Камера на шасси
Камера на мобильном шасси и возможностью поворота на 360 градусов. Установите на робота мобильный телефон или фотокамеру и начните снимать! Вы можете задать путь движения камеры.
3D-съёмка
Вращающаяся на 360 градусов платформа позволяет снять панорамный вид объекта или сделать круговую съёмку небольшого объекта. При установке соответствующего приложения возможна реализация 3D-сканирования.
Балансирующий робот
Робот стоит на двух колёсах, управляемых двигателями с энкодерами. Он может двигаться вперёд и назад, балансируя при этом на двух колёсах.
Другие конструкции:
Робот-муравей
Вращающийся танк
Катапульта
Что в комплекте:
Каталог наземных военных роботов различного назначения
Каталог наземных военных роботов различного назначения — Наземные военные роботы
Россия
Авторобот, Россия
Роботизированное транспортное средство. Статус — разработка на 2016.07
Статус — разработка на 2016.07
Акация-Э, Россия
2015.06 «Комплексы управления войсками», способный автономно обнаруживать и анализировать ситуацию, вести одновременно до двухсот целей, и без человеческого участия принимать решение на открытие огня.
2015.06.14 В 2015 году в России появится система управления группировками роботов.
Арбалет-ДМ, Ковровский электромехнический завод и компания Оружейные мастерские, Россия
Источник фото: gazeta.ru
Боевой телеуправляемый комплекс (робот-пулемет). Пулемет Калашникова ПКМ, 750 патронов. Нет перезарядки. ДУ с дальностью действия до 2.5 км. Дальность прицельной стрельбы — до 2 км днем, до 1 км ночью. Видеокамера.
На базе погрузчика ANT-1000R (?)
Статус: испытания запланированы на март 2016 года. Демонстрировали на RAE-2015.
АРГО
модифицированный в России вездеход-амфибия канадского производства. Оснащается боевым модулем.
Бумеранг, Россия
ПВМ Бумеранг. Противовертолетная роботизированная мина. Система, сопрягающая информацию, полученную с ИК-датчиков, системы звукового отслеживания. Способна с земли сбить вертолет или садящийся или взлетающий самолет. Такие мины предполагается разбрасывать рядом с аэродромами противника.
Варан, Россия
источник фото: 3dnews.ru
Мобильный робот для выявления, обезвреживания и уничтожения взрывных устройств. Гусеничный. Разработка НИИ СМ МГТУ им. Н.Э.Баумана (конструкция робота и системы управления), ОАО Специальное конструкторское бюро приборостроения и автоматики (ОАО СКБ ПА, Ковров) — разработка документации для серийного изготовления на заводе ОАО «Ковровский электромеханический заво» ОАО КЭМЗ, Ковров. / cad.ru
2008.07.18 Робот Варан — отечественная робототехническая платформа.
Вездеход-ТМ3, КБ ПА (ОАО Специальное Конструкторское бюро Приборостроения и Автоматики), Роcсия
Проведение аудио-видеоразведки объектов и территорий в условиях слабопересеченной местности, городской инфраструктуры и в помещениях. Осмотр днищ салонов и багажных отделений транспортных средств. Доставка, установка и дистанционное приведение в действие разрушителей взрывоопасных устройств (ВУ) при любой освещенности. Проведение взрывотехнических операций.
Осмотр днищ салонов и багажных отделений транспортных средств. Доставка, установка и дистанционное приведение в действие разрушителей взрывоопасных устройств (ВУ) при любой освещенности. Проведение взрывотехнических операций.
40 кг, управление по радио — до 600 м, по кабелю — до 75 метров, 75 минут работы без подзарядки. Скорость передвижения — 1 м/с. Ковров, Владимирская область. / oao-skbpa.ru
Волк-2, Россия
2013. Продемонстрирован дистанционно управляемый боевой мобильный ударно-разведывательный робототехнический комплекс. Разработка и совместное производство Ижевского радиозавода и корпорации УВЗ. На 2015.06 прошел испытания. До 250 км без дозаправки. Может отслеживать одновременно 6 целей.
Горец (МЗ204), Мотовилихинские заводы, Россия
Автоматические мобильные минометные комплексы созданы на базе буксируемого пехотного миномета «Сани» разработанного в АО «ЦНИИ Буревестник». Для установки на шасси бронеавтомобиля «Тигр», «Тайфун-К» или транспортере «Ракушка». Управление из бронеячейки, зарядка из кабины через специальное отверстие к которому ствол автоматически опускается после выстрела.
Для установки на шасси бронеавтомобиля «Тигр», «Тайфун-К» или транспортере «Ракушка». Управление из бронеячейки, зарядка из кабины через специальное отверстие к которому ствол автоматически опускается после выстрела.
Кобра-1600, Россия
Мобильный робототехнический комплекс, входящий в состав мобильного инженерного комплекса разминирования (МИКР), предназначенного для эффективного обеспечения разминирования местности и объектов в городских условиях.
2018.08.17 Кобра-1600 поможет солдатам остаться в живых.
КПР
подвижный робототехнический комплекс РХБЗ
Ликвидатор
В заметке от 2 июня 2015 года речь о телеуправляемой платформе, собранной курсантами тагильского центра НТИИМ для участия во Всероссийской робототехнической олимпиаде. На снимке в заметке вместо курсансткой разработки приведено фото робота американской компании iRobot 310 SUGV.
2015.06.02 Тагильский Ливидатор едет в Татарстан
2014. 07.21 США передали Украине роботов-саперов.
07.21 США передали Украине роботов-саперов.
МАРС А-800, КБ Аврора, Россия
фото: kb-avrora.ru
Робомул. Мобильная автономная робототехническая система. Предназначена для использования в войсках. Может доставлять боеприпасы на поле боя и эвакуировать раненых бойцов. Испытана совместно с Рязанским воздушно-десантным училищем в 2016 году. Планируется продолжение тестов в октябре 2016 года.
Пока что опытный образец.
МРК-002-БГ-57, Россия
источник фото: function.mil.ru, 2016.11.10
Ижевский радиозавод. Мобильный ударно-разведывательный робототехнический комплекс РВСН РФ. Вооружение: пулемет Корд или танковый пулемет Калашникова или 30-мм станковый автоматический гранатомет АГ-30/29. Лазерный дальномер, гиростабилизаторы оружейной платформы, тепловизор, баллистический вычислитель. Функция автозахвата. Возможность ведения до 10 целей в движении. До 10 часов автономно. Запас хода — 250 км. От минус 40 до плюс 40. Проходил испытания в Серпуховском военном институте в апреле 2014 года. МРК оснащен техникой для ведения разведки, обнаружения и уничтожения стационарных и подвижных целей, огневой поддержки подразделений, патрулирования и охраны важных объектов в составе автоматизированных систем охраны. Комплекс планируется применять вместе с боевой противодиверсионной машиной «Тайфун-М», созданной на базе БТР.
Возможность ведения до 10 целей в движении. До 10 часов автономно. Запас хода — 250 км. От минус 40 до плюс 40. Проходил испытания в Серпуховском военном институте в апреле 2014 года. МРК оснащен техникой для ведения разведки, обнаружения и уничтожения стационарных и подвижных целей, огневой поддержки подразделений, патрулирования и охраны важных объектов в составе автоматизированных систем охраны. Комплекс планируется применять вместе с боевой противодиверсионной машиной «Тайфун-М», созданной на базе БТР.
2016.11.11 В РВСН испытали новейшую роботизированную систему охраны шахтных пусковых установок. / function.mil.ru
2013. Есть фото и краткие характеристики
МРК-27, Россия
МРК-27-БК
Гусеничный робот. Может быть вооружен двумя гранатометами АГС-30, двумя огнеметами Шмель, пулеметом Печенег и до 10 дымовых гранат. Вооружение съемное. Дальность телеуправления — до 500 метров. Ижевский радиозавод (предположительно). Возможно совместно с Бюро прикладной робототехники МГТС им. Н.Э.Баумана.
Ижевский радиозавод (предположительно). Возможно совместно с Бюро прикладной робототехники МГТС им. Н.Э.Баумана.
2015.05.18 Дайджест: боевый роботы России (наземные). Фото МРК-27-Б с пулеметами и гранатометами. Видео МРК-27-Б.
МРК-46М, Россия
Мобильный гусеничный военный телеуправляемый робот.
Масса: 650 кг; габариты ДхШхВ 2.34х1.146х1,32 м; скорость до 0.5 км/ч; допустимый угол крена/диффирента — до 20 град, высота преодолеваемых пороговых препятствий — не более 0.25 м; продолжительность непрерывной работы — не менее 8 часов. Дальность управлению по радиоканалу — не менее 2000 м, по кабелю — не менее 200 метров. Предельно допустимая грузоподъемность манипулятора, 100 кг.
Входит в комплекс «Разнобой», принятый на снабжение Сухопутных войск ВС РФ.
МРК-РХ, Россия
источник: engjournal.ru
Мобильный гусеничный телеуправляемый военный робот.
Масса: 190 кг; габариты ДхШхВ 1. 35х0.65х0,7 м; скорость до 1.0 км/ч; допустимый угол крена/диффирента — до 35 град, высота преодолеваемых пороговых препятствий — не более 0.25 м; продолжительность непрерывной работы — не менее 4 часов. Дальность управлению по радиоканалу — не менее 2000 м, по кабелю — не менее 200 метров. Предельно допустимая грузоподъемность манипулятора, 50 кг.
35х0.65х0,7 м; скорость до 1.0 км/ч; допустимый угол крена/диффирента — до 35 град, высота преодолеваемых пороговых препятствий — не более 0.25 м; продолжительность непрерывной работы — не менее 4 часов. Дальность управлению по радиоканалу — не менее 2000 м, по кабелю — не менее 200 метров. Предельно допустимая грузоподъемность манипулятора, 50 кг.
МРК-РХ входит в комплекс РД-РХР (для ведения радиационной и хим. разведки). Может оснащаться дополнительным оборудованием (для радиационной разведки, гамма-поиска, пробоотборником, средствами дезактивации, специализированными захватами, специальными контейнерами, и т.п.)
Нерехта, ЗиД и Сигнал, Россия
ОАО «Завод им. В.А.Дегтярева» (ЗиД) и Всероссийский научно-исследовательский институт (ВНИИ) «Сигнал».
Может нести пулеметы ПКТМ и Корд, а также автоматический гранатомет. В стадии разработки.
Нерехта-2, ЗИД и Сигнал, Россия
ОАО «Завод им. В.А.Дегтярева» (ЗиД) и Всероссийский научно-исследовательский институт (ВНИИ) «Сигнал»
В.А.Дегтярева» (ЗиД) и Всероссийский научно-исследовательский институт (ВНИИ) «Сигнал»
В августе 2016 года сообщается о планах разработки робота Нерехта-2 на базе робота Нерехта. Это будет группировка наземных робототехнических комплексов. В нее войдет гусеничная платформа, собственно, Нерехта, допускающую установку на нее оружия. ПО аппарата позволит ему понимать команды, отдаваемые голосом и жестами. Робот сможет работать в режиме атоматического движения по заранее неподготовленной местности. Робот получит новый тип боеприпаса для решения задачи в условиях непрямой видимости. Для платформы попробуют подобрать эффективный гибридный двигатель. Также ожидается, что в перспективе робот сможет автоматически следить за заданным ему «опасным направлением» и автоматически открывать огонь при появлении противника. Аппарат сможет возить за солдатом часть его амуниции. А при необходимости сможет эвакуировать в тыл раненого бойца. «Нерехту-2» с новым типом боеприпаса и «воздушной составляющей» ФПИ (финансирует проект) обещает показать на полигоне в конце 2016 года.
Пластун, Россия
Источник фото: robocraft.ru
Телеуправляемый аппарат наблюдения.
Платформа-М, НИТИ-Прогресс (ОАО НИТИ-Прогресс), Россия
Дистанционно-управляемые гусеничные машины «Платформа-М»
Класс: «мелкая техника».
Первые серийный поставки в армию ожидаются в 2018 году.
источник
Проход (РТК «Проход»)
На базе штатного легкобронированного образца БТВТ (инженерной разведывательной машины) был изготовлен экспериментальный образец РТК для преодоления минно взрывных заграждений и сплошного разминирования местности с использованием роторного бойкового трала.
Масса: 20 тонн, дальность управления на открытой местности — до 3 км, скорость движения при преодолении МВЗ — не более 12 км/ч, транспортная скорость в экипажном режиме — до 50 км/ч, в режиме ДУ — до 30 км/ч. Глубина траления — не более 0. 4 м, ширина траления — не более 3.6 м.
4 м, ширина траления — не более 3.6 м.
РД-РХР
дистанционно-управляемый робот радиационной и химической разведки
РУРС, Россия
Роботизированный, телеуправляемый робот-разведчик на четырехколесном ходу. Может разгоняться до 80 км/с. Дистанционно управляется оператором или работает автономно, например, в режиме патрулирования. Может автоматически открывать огонь.
2013. Фото РУРС с выставки Russia Arms EXPO-2013.
Рысь, Россия
Так называемый «биоморф» (подобный животному), четвероногий боевой робот. Должен уметь вести разведку, перевозить боеприпасы и снаряжение, эвакуировать убитых и раненых с поля боя, вести разминирование и боевые действия. На 2016.03 в разработке, готовность ожидается к 2019 году.
Скарабей, СЕТ-1, Москва
досмотровый 4-х колесный робот (может быть гусеничным)
Соратник, концерн Калашников, Россия
Военный роботизированный комплекс. Гусеничная бронированная машина. Предназначен для ведения разведки и ретрансляции, патрулирования и охраны территорий и важных объектов, разминирования и разграждения. Может использоваться, как машина огневой поддержки или для подвоза боеприпасов и ГСМ, эвакуации раненых, сторожевого охранения. Показан в сентябре 2016 года на форуме Армия-2016.
Гусеничная бронированная машина. Предназначен для ведения разведки и ретрансляции, патрулирования и охраны территорий и важных объектов, разминирования и разграждения. Может использоваться, как машина огневой поддержки или для подвоза боеприпасов и ГСМ, эвакуации раненых, сторожевого охранения. Показан в сентябре 2016 года на форуме Армия-2016.
Стрелок, Специальная Строительная Техника (ООО Специальная Строительная Техника), Россия
Телеуправляемый робот на гусеничном шасси для боев в городских условиях.
Демонстрируется на выставках с 2013 года.
Сфера, СЕТ-1, Москва
досмотровый мини-робот в форм-факторе небольшой сферы, оборудованной видеокамерами
Торнадо, МГТУ им. Баумана, Россия
колесно-шагающий транспортный модуль высокой проходимости Торнадо, МГТУ им. Баумана
В 2014-2016 году показывают на различных выставках, например, в «Interpolitex — 2014».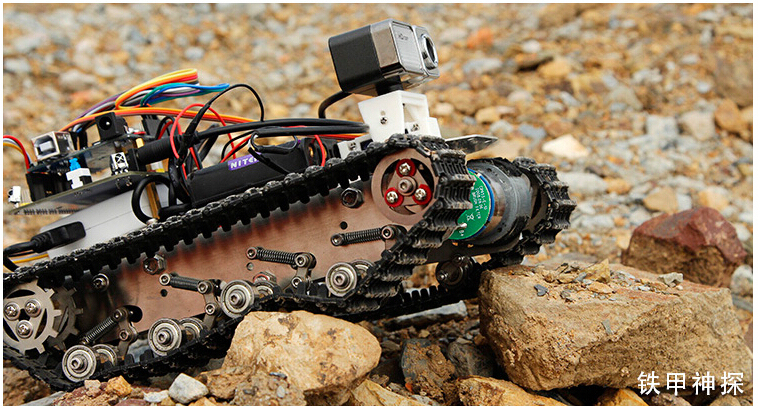 Ему прочат использование в инженерных войсках РФ. В 2016.07 показан в Муроме на выставке инженерного вооружения российской армии.
Ему прочат использование в инженерных войсках РФ. В 2016.07 показан в Муроме на выставке инженерного вооружения российской армии.
Удар, Россия
фото: zonatex.ru
Шасси БМП-3, безэкипажная роботизированная машина. Пушка и спаренный пулемет ПКТ с боезапасом в 2000 патронов. Комплекс «Корнет» (4 УР на двух защищенных пусковых установках). Поиск целей в различных спектральных диапазонах в пассивном и активном режимах. Возможен одновременный обстрел двух целей (автоматическая пушка — по воздушным целям с использованием автомата сопровождения). Оптический локатор. Показан летом 2016 года.
Уран-6, 766 УПТК (ОАО 766 УПТК), Россия
Считается «отечественной разработкой», хотя внешне не отличим от хорватского MV-4, давно выпускаемого телеуправляемого комплекса разминирования. Вероятно речь идет о «лицензионном производстве».
фото: ОАО 766 УПТК
Уран-9 (БМФ РТК)
многофункциональный робот, предназначенный для дистанционной разведки и огневой поддержки разведывательных, антитеррористических и общевойсковых подразделений армии. В состав комплекса входят два робота-разведчика, тягач для их транспортировки и передвижной пункт управления.
В состав комплекса входят два робота-разведчика, тягач для их транспортировки и передвижной пункт управления.
Уран-14, 766 УПТК (ОАО 766 УПТК), Россия
Телеуправляемый робот, предназначенный для тушения пожаров и разборки завалов.
RS1A3 Mini Rex, LOBAEV Robotics
UGS (Unmanned Ground System). Роботизированный мобильный стрелковый комплекс. Гусеничный роботизированный комплекс (35 кг), помещается в ранец, может переноситься расчетом из 2 человек. Вооружен стрелковым комплексом калибра 7.62х39 мм. Показан в январе 2016 года, остается в статусе «в разработке» на январь 2017 года.
Неопознанный-1
Кто-нибудь знает, что это за робот?
Неопознанный-2
12-колесный телеуправляемый мини-робот, оснащенный чем-то похожим на два гранатомета и ручной пулемет.
2016.12.04 12-колесный робот неназванной модели был задействован в спецоперации в Дагестане.
Австралия
Autonomous Robotic Human Type Target, Marathon Targets, Австралия
мобильные роботизированные мишени, имитирующие пехоту врага. Способны автономно или в режиме телеуправления выкатываться из укрытий и устремляться «в атаку» на новобранцев, задача которых — поразить роботов огнем стрелкового оружия. Известны с 2015 года.
2016.03.04 На американских военных полигонах появились роботы
Беларусь
Адунок (Одунок), ОАО КБ Дисплей, Беларусь
Фото: armyrecognition.com
Автоматизированный Дистанционно-Управляемый Наблюдательно-Огневой Комплекс
Берсерк, БСВТ (ООО БСВТ — Новые технологии), Беларусь
Источник фото: sb.by 2020.05.20
2020.05 Показан главе государства Беларусь. В 2020 году планируется завершить испытания, после чего платформа будет готова к поставкам в войска. / sb.by
Богомол, Белспецвнештехника, Беларусь
Представлен на выставке MILEX-2017 в Минске в мае 2017 года.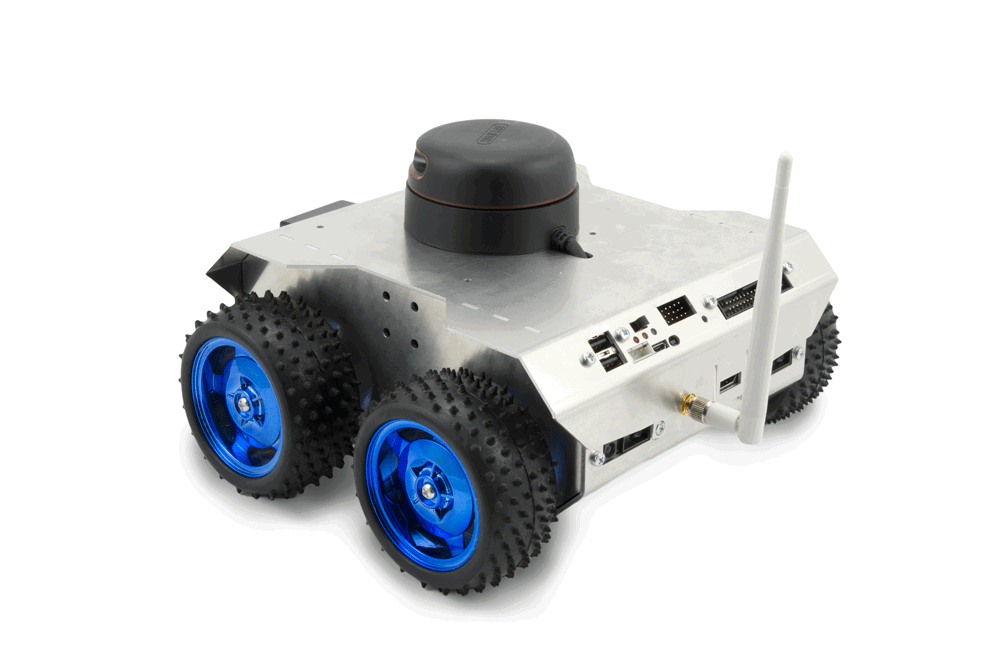 Разработчик: Белспецвнештехника — Новые технологии. Противотанковый самоходный робот и автоматизированное место оператора. Вес — 1850 кг. Предназначен для поражения в автоматизированном режиме укрепленных наземных целей, танков, бронемашин и вертолетов.
Разработчик: Белспецвнештехника — Новые технологии. Противотанковый самоходный робот и автоматизированное место оператора. Вес — 1850 кг. Предназначен для поражения в автоматизированном режиме укрепленных наземных целей, танков, бронемашин и вертолетов.
Вистл
Роботизированный комплекс — разведывательная машина с поворотной платформой с 18 направляющими для НАР С-5. / ctv.by
Германия
Cobham TeleMAX EOD/IEDD, Германия
Телеуправляемый робот первичного осмотра и сервисная самодвижущаяся платформа, разработанные европейской компанией Cobham. Четырехколесная платформа с дополнительными гусеницами. Способен преодолевать уклоны до 45 гадусов. Автоматический сканер окружающего пространства. 17 Ач NiMh или 2 Li-Ion по 19 или 7.6 Ач. Cobham Unmanned Systems — это бренд Telerob GmbH.
2015.05 Видео
Cobham tEODor, Германия
Телеуправляемый разборщик мин. Гусеничная платформа. Автоматический сканер окружающего пространства. Cobham Unmanned Systems — это бренд Telerob GmbH.
Гусеничная платформа. Автоматический сканер окружающего пространства. Cobham Unmanned Systems — это бренд Telerob GmbH.
2015.05. Видео
Канада
ARGO, Ontario Drive & Gear Limited, Канада
вездеход-амфибия. Может использоваться в модифицированном виде с установленным на нем боевым модулем
Digital Vanguard ROV, MED-ENG, Канада
Телеуправляемый робот разминирования. Подробнее по ссылке.
Израиль
Avantguard UGCV, G-NIUS Unmanned Ground Systems Ltd., Израиль
Компания G-NIUS совместно принадлежит компаниям Elbit Systems и Israel Aerospace Industries.
Беспилотная боевая военная машина. Базируется на шасси наземной технической машины-амфибии (TAGS) компании Dumur Industries of Canada.
Модульнаые навесные системы.
DOGO, General Robotics, Израиль
Миниатюрный вооруженный телеуправляемый тактический робот, заявленная цель которого — антитеррористические операции. Гусеничная платформа, вооруженная автоматическим пистолетом. Может выступать разведчиком или ликвидатором. Назван в честь аргентинского дога. Анонсирован в мае 2016 года.
Гусеничная платформа, вооруженная автоматическим пистолетом. Может выступать разведчиком или ликвидатором. Назван в честь аргентинского дога. Анонсирован в мае 2016 года.
MGTR (micro tactical ground robot), Roboteam, Израиль
Батареи хватает на 2 часа работы, микрофон и 5 камер позволяют собирать разведданные днем и ночью. Скорость машинки — 3.5 км/ч, полезная нагрузка — до 10 кг. Два манипулятора позволяют подбирать с земли различные объекты и перемещать их.
2016.08.27 Израильская армия готовится к широкому внедрению роботизированных систем.
RoBattle, Israel Aerospace Industries (IAI), Израиль
Многоцелевой модульный военный робот. Эта наземная платформа может использоваться в целях охраны местности, для выполнения отвлекающих маневров или разведки. Система построена по модульной схеме, как и подавляющее большинство наземных военных роботов. В набор входят системы управления, навигации, автоматического построения маршрута по цифровой карте, а также всевозможные сенсоры.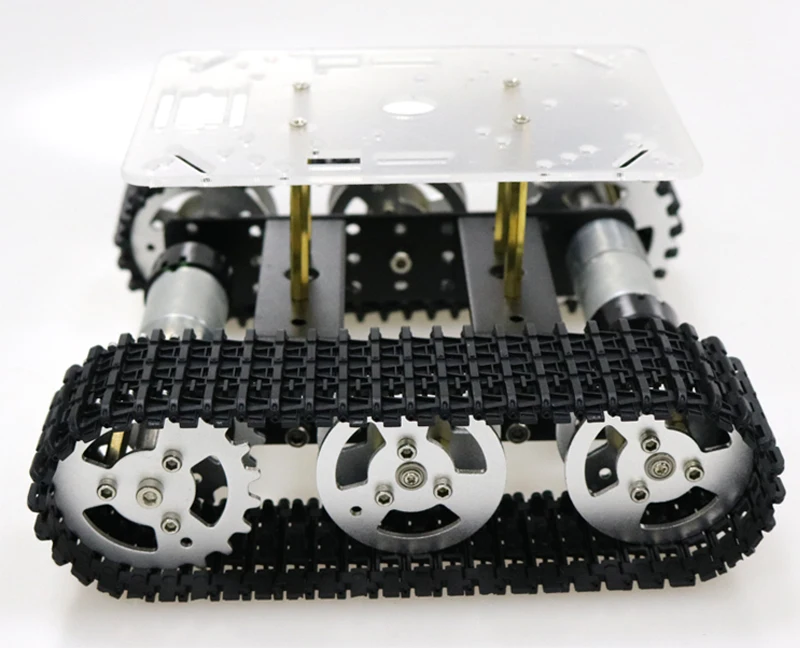 В зависимости от целей и задач миссии, робота можно “обуть” в гусеницы или установить колеса, смонтировать на него “руки” для разминирования, радар или даже оружие.
В зависимости от целей и задач миссии, робота можно “обуть” в гусеницы или установить колеса, смонтировать на него “руки” для разминирования, радар или даже оружие.
2016.06.11 В семействе модульных роботов пополнение: встречайте израильский RoBattle!
Китай (наземные военные роботы Китая)
Sharp Claw I
Пулеметный «роботанк», скорость до 10 км/ч, 0.7 см длиной, 0.6 м высотой, весит 120 кг, пулемет 7.62 мм.
2020.07 Система поступила в НОАК. Дебют системы состоялся в 2014 году.
США (наземные военные роботы США)
Ford
Ford SIAM, США
General Dynamics, США
MUTT
HDT Global, США
Hunter WOLF
iRobot, США
iRobot 110 FirstLook
iRobot 310 SUGV
iRobot 510 PackBot
iRobot 710 Kobra
QinetiQ (Foster-Miller | TALON), США
EMAV (совместно с Pratt & Miller)
MAARS (Modular Advanced Armed Robotic System)
Talon V
Remotec Inc. , США
, США
Andros F6A
Andros FX
Andros HD1
mini ANDROS II
Mk VA1/RONS
Wolverine
Resquared, США
HDMS 551s1
Textron / Howe & Howe, США
Ripsaw M5
А также такие модели, как:
MDARS (Mobile Detection Assessment and Response System)
Mk VA1/RONS
Mark II Talon
RipSaw
TALON SWORDS (Special Weapons Observation Reconnaissance Detection Systems)
Украина (наземные военные роботы Украины)
Хорватия
MV4 DOK-ING, Хорватия
Видео , Видео
Многофункциональный телеуправляемый мобильный комплекс разминирования. В России известен как «отечественная разработка» Уран-6, но представлен также и в оригинальном виде, как MV-4.
В России известен как «отечественная разработка» Уран-6, но представлен также и в оригинальном виде, как MV-4.
Швейцария
Oerlikon Twingun GDF 007, Швейцария
Роботизированный зенитный комплекс. Oerlikon, Швейцария
Raider II
R-Gator A3
Skyguard, Швейцария
Швейцария, зенитный комплекс, на базе 35-мм зенитных орудий Oerlikon GDF. Использовался во время войны 1982 года Объединенного королевства и Аргентины за контроль над Фолклендскими островами. Способен самостоятельно принимать решение на открытие огня и применялся в этом режиме, в том числе и против пехоты. На его счету есть и сбитые самолеты «своих».
Skyguard-Sparrow, Швейцария
Швейцария, роботизованная зенитная ракетная пусковая установка.
Эстония
Milrem Robotics, Эстония
THeMIS (Themis Adder), Milrem Robotics, Эстония
источник фото: zele. ru
ru
модульная гусеничная платформа (может использоваться, как мини-танк с летальным оружием или разведывательная, транспортная)
Type-X, Milrem Robotics, Эстония
на рендере THeMIS (слева), Type-X (справа), armyrecognition.com
роботизированный танк, первая из армейских беспилотных машин на базе единого шасси. Платформу можно будет оснащать роботизированными модулями с орудиями калибра до 50 мм, минометами, противотанковыми ракетами и системами ПВО. На том же шассе будет выпущен ряд невооруженных машин — носители РЛС, транспортники, инженерные машины и т.д. Платформа будет оснащена дизель-электрической гибридной двигательной установкой. Полностью заряженных батарей и полного бака хватит на 600 км пути. Собрать первые образцы для испытаний в компании планируют до конца 2020 года. / warspot.ru есть еще рендер.
Южная Корея
Samsung
SGR-1, Samsung, Южная Корея
робот-турель. Есть режим автономного открытия огня (в мирное время не задействован).
Есть режим автономного открытия огня (в мирное время не задействован).
2015.05.21 Samsung SGR-1 — робот-пограничник
2014.09.15 Who goes there? Samsung unveils robot sentry that can kill from two miles away
Производитель неизвестен
CAMEL
SMSS
Taurus Dexterous Telepresense
Телеуправляемая система разминирования, позволяющая также брать пробы опасных материалов. Офсайт компании SRI International. Офсайт Taurus Dexterous Robot. SRI International
2015.05.06 Taurus Dexterous Telepresense Manipulation System
+ +
Схватка: военные роботы России и США: newsoldat — LiveJournal
В создании роботизированных боевых единиц в настоящее время наблюдается жесткая конкуренция между Россией и Америкой.
Первая весьма серьезно уступает своему заокеанскому противнику в разработках беспилотных летательных аппаратов, но, похоже, значительно преуспела в создании боевых роботов на гусеничном ходу.
SWORDS —это самая массовая и достаточно узнаваемая гусеничная платформа США, на базе которой устанавливается боевой модуль. В составе модуля имеется снайперская винтовка, гранатомет и курсовой пулемет. Как заявляет производитель, робот способен действовать в городской местности, может преодолевать песок, воду и снежные покровы небольшой глубины. Кроме того, благодаря сложной системе работы шасси, платформа способна даже осуществлять подъем по лестнице. SWORDS рассчитан на 8,5 часа работы от внутреннего аккумулятора.
iRobot Warrior — роботизированная платформа, способная двигаться со скоростью до 15 км/ч и оборудованная манипулятором для перемещения грузов массой до 68 кг. В боевую комплектацию Warrior включена система гранатометов и пулеметов Metal Storm с электронной схемой управления стрельбой на дальность 800 метров.
CAMEL — это плоская боевая платформа на колесном шасси, которая кроме вооружения может нести еще и 550 кг полезной нагрузки. На колеса дополнительно одеваются резиновые гусеницы, что значительно повышает проходимость платформы по пересеченной местности. Робот может сопровождать боевые подразделения и двигаться автономно, ориентируясь на сигналы GPS.
На колеса дополнительно одеваются резиновые гусеницы, что значительно повышает проходимость платформы по пересеченной местности. Робот может сопровождать боевые подразделения и двигаться автономно, ориентируясь на сигналы GPS.
Black Knight — экспериментальная боевая машина разработанная компанией BAE Systems. Базирующийся на гусеничном шасси «Черный рыцарь» имеет вес почти в 10 тонн и обладает 30-мм автоматической пушкой и скорострельным курсовым пулеметом. Робот оснащается целый системой телекамер, тепловизоров, РЛС, датчиков и сенсоров. Управление роботом осуществляется из БМП Bradley.
Боевые роботы РоссииМРК — универсальная роботизированная платформа от ижевского радиозавода. Этот робот невелик, но он располагает весьма внушительным арсеналом вооружений, которые можно менять в зависимости от поставленных задач. Робот может быть оборудован двумя гранатометами, двумя реактивными огнеметами «Шмель», пулеметом «Печенег» или крупнокалиберным пулеметом «Корд». МРК также оснащен микрофоном, системой оповещения и видеокамерами, что позволяет управлять им на дальности в 500 метров.
МРК также оснащен микрофоном, системой оповещения и видеокамерами, что позволяет управлять им на дальности в 500 метров.
«Уран-6» – это робот-сапер, который применяется для разминирования территорий. Он способен выдержать взрыв 60-килограммового заряда тротила, а благодаря интеллектуальной электронной начинке умеет определять и обезвреживать различные виды снарядов, бомб и т.д.
«Уран-9» — это дистанционно управляемая гусеничная боевая машина, относящаяся к категории наземных боевых беспилотных аппаратов. Он способен вести инженерную разведку и поражать как наземные, так и низколетящие воздушные цели на максимальной дальности.
Внешне «Уран» напоминает небольшой бронетранспортер с башней, в которой установлено самое разнообразное вооружение, включая 30-миллиметровую автоматическую пушку 2А72 и спаренный с ней 7,62-миллиметровый пулемет.
«Нерехта-2» — это боевой роботизированный комплекс, испытания которого должны начаться в конце года на полигоне «Салка» в Нижнем Тагиле.
Это разработка должна стать частью экипировки «солдата будущего», о котором мы рассказывали в одном из наших предыдущих сюжетов. Пересмотрите видео «Ратник» — солдат будущего». Что-то типа оруженосца и боевого помощника, способного работать в различных условиях, как в городе, так и на сильно пересеченной местности.
Обзор поисковых роботов Google (пользовательских агентов) | Центр поиска
«Краулер» — это общий термин для любой программы (например, робота или паука), которая используется для
автоматически обнаруживать и сканировать веб-сайты, переходя по ссылкам с одной веб-страницы на другую.
Главный сканер Google называется
Googlebot. В этой таблице приведена информация
об обычных сканерах Google, которые вы можете видеть в журналах рефереров, и о том, как они должны быть
указано в
роботы.txt,
метатеги robots и X-Robots-Tag HTTP-директивы.
В следующей таблице показаны поисковые роботы, используемые различными продуктами и услугами в Google:
- Токен пользовательского агента используется в строке
User-agent:в robots. txt.
чтобы соответствовать типу сканера при написании правил сканирования для вашего сайта. У некоторых сканеров более
один жетон, как показано в таблице; вам нужно сопоставить только один токен сканера, чтобы правило
применять.Этот список неполный, но охватывает большинство поисковых роботов, которые вы можете увидеть на своем
Веб-сайт.
txt.
чтобы соответствовать типу сканера при написании правил сканирования для вашего сайта. У некоторых сканеров более
один жетон, как показано в таблице; вам нужно сопоставить только один токен сканера, чтобы правило
применять.Этот список неполный, но охватывает большинство поисковых роботов, которые вы можете увидеть на своем
Веб-сайт. - Полная строка пользовательского агента — это полное описание поискового робота, которое появляется в запрос и ваши веб-журналы. Эти значения можно подделать. Если вам нужно убедиться, что посетитель Googlebot, вам следует использовать обратный поиск DNS.
| Гусеничный | Токен агента пользователя (токен продукта) | Полная строка пользовательского агента |
|---|---|---|
| API — Google | | API-интерфейсы Google (+ https: // developers. |
| AdSense | | Медиапартнеры-Google |
AdsBot Мобильный Интернет Android (проверяет качество рекламы на веб-странице Android) | | Mozilla / 5.0 (Linux; Android 5.0; SM-G920A) AppleWebKit (KHTML, например Gecko) Chrome
Мобильный Safari (совместимый; AdsBot-Google-Mobile;
+ http: //www.google.com/mobile/adsbot.html) |
AdsBot Mobile Web (проверяет качество рекламы на веб-странице iPhone) | | Mozilla / 5. |
AdsBot (проверяет качество рекламы на веб-странице для ПК) | | AdsBot-Google (+ http: // www.google.com/adsbot.html ) |
| Изображение робота Googlebot |
| Googlebot-Image / 1. |
| Новости робота Googlebot | Googlebot-News | |
| Googlebot Video |
| Googlebot-Video / 1.0 |
Googlebot Desktop | |
|
Смартфон Googlebot | | |
| AdSense для мобильных устройств | | (Различные типы мобильных устройств) (Совместимо с ; Mediapartners-Google / 2.1 ; + http: //www.google.com/bot.html ) |
Мобильные приложения Android (Проверяет качество рекламы на странице приложения Android. Подчиняется правилам роботов AdsBot-Google.) | | AdsBot-Google-Mobile-Apps |
Загрузочная машина | Не уважает роботов. | |
Google Читать вслух | ошибка Не соблюдает правила robots.txt — вот почему | Текущие агенты:
Бывший агент ( устаревший ): |
| Дуплекс в Интернете | ошибка Может игнорировать подстановочный знак | Mozilla / 5.0 (Linux; Android 11; Pixel 2; DuplexWeb-Google / 1.0)
AppleWebKit / 537. |
Google Favicon (извлекает значки для различных служб) | ошибка Для запросов, инициированных пользователем, игнорирует роботы.txt правила | Mozilla / 5.0 (X11; Linux x86_64) AppleWebKit / 537.36 (KHTML, например Gecko)
Chrome / 49.0.2623.75 Safari / 537.36 Google Favicon |
| Веб-светильник | ошибка Не соблюдает правила robots. | Mozilla / 5.0 (Linux; Android 4.2.1; en-us; Nexus 5 Build / JOP40D) AppleWebKit / 535.19
(KHTML, например Gecko; googleweblight) Chrome / 38.0.1025.166 Mobile Safari / 535.19 |
| Google StoreBot | Storebot-Google | Настольный агент: Мобильный агент: |
 google.com/webmasters/APIs-Google.html)
google.com/webmasters/APIs-Google.html)  0 (iPhone; процессор iPhone OS 9_1, например Mac OS X) AppleWebKit / 601.1.46 (KHTML,
как Gecko) Версия / 9.0 Mobile / 13B143 Safari / 601.1 (совместимый; AdsBot-Google-Mobile;
+ http: //www.google.com/mobile/adsbot.html)
0 (iPhone; процессор iPhone OS 9_1, например Mac OS X) AppleWebKit / 601.1.46 (KHTML,
как Gecko) Версия / 9.0 Mobile / 13B143 Safari / 601.1 (совместимый; AdsBot-Google-Mobile;
+ http: //www.google.com/mobile/adsbot.html)  0
0  0 AppleWebKit / 537.36 (KHTML, как Gecko; совместимый; Googlebot / 2.1;
+ http: //www.google.com/bot.html)
Хром / W.X.Y.Z ‡ Safari / 537.36
0 AppleWebKit / 537.36 (KHTML, как Gecko; совместимый; Googlebot / 2.1;
+ http: //www.google.com/bot.html)
Хром / W.X.Y.Z ‡ Safari / 537.36  google.com/bot.html)
google.com/bot.html)  txt правила —
вот почему
txt правила —
вот почему 0 (Linux; Android 7.0; SM-G930V Build / NRD90M)
AppleWebKit / 537.36 (KHTML, например Gecko) Chrome / 59.0.3071.125 Mobile Safari / 537.36
(совместимо; Google-Read-Aloud;
+ https: // разработчики.google.com/search/docs/advanced/crawling/overview-google-crawlers)
0 (Linux; Android 7.0; SM-G930V Build / NRD90M)
AppleWebKit / 537.36 (KHTML, например Gecko) Chrome / 59.0.3071.125 Mobile Safari / 537.36
(совместимо; Google-Read-Aloud;
+ https: // разработчики.google.com/search/docs/advanced/crawling/overview-google-crawlers)  36 (KHTML, например Gecko) Chrome / 86.0.4240.193
Мобильный Safari / 537.36
36 (KHTML, например Gecko) Chrome / 86.0.4240.193
Мобильный Safari / 537.36  txt —
вот почему
txt —
вот почему 0.4044.138 Mobile Safari / 537.36
0.4044.138 Mobile Safari / 537.36 ‡ Chrome / W.X.Y.Z в пользователе агенты
Везде, где вы видите струну Chrome / W.X.Y.Z в пользовательском агенте строки в таблице, W.X.Y.Z на самом деле является заполнителем, который представляет версию браузера Chrome, используемого этим пользовательским агентом: например, 41.0.2272.96. Эта версия число со временем увеличится до соответствует последней версии выпуска Chromium, используемой роботом Googlebot.
Если вы ищете в своих журналах или фильтруете свой сервер для пользовательского агента с этим шаблоном, вам, вероятно, следует использовать подстановочные знаки для номера версии, а не указывать точный номер версии.
 txt»> Пользовательские агенты в robots.txt
txt»> Пользовательские агенты в robots.txt
Если в файле robots.txt распознаются несколько пользовательских агентов, Google будет следить за большинством
конкретный. Если вы хотите, чтобы весь Google мог сканировать ваши страницы, вам не нужен
robots.txt вообще. Если вы хотите заблокировать или разрешить всем сканерам Google доступ
часть вашего контента, вы можете сделать это, указав Googlebot в качестве пользовательского агента. Например,
если вы хотите, чтобы все ваши страницы отображались в поиске Google, и если вы хотите, чтобы показывались объявления AdSense
на ваших страницах вам не нужен файл robots.txt файл. Аналогично, если вы хотите заблокировать некоторые страницы
от Google, блокировка пользовательского агента Googlebot также заблокирует все
Другие пользовательские агенты Google.
Но если вам нужен более детальный контроль, вы можете сделать его более конкретным. Например, вы можете
хотите, чтобы все ваши страницы отображались в поиске Google, но вы не хотите, чтобы изображения в личном
каталог для сканирования. В этом случае используйте robots.txt, чтобы запретить
Например, вы можете
хотите, чтобы все ваши страницы отображались в поиске Google, но вы не хотите, чтобы изображения в личном
каталог для сканирования. В этом случае используйте robots.txt, чтобы запретить Googlebot-Image пользовательский агент от сканирования файлов в вашем личном каталоге
(позволяя роботу Google сканировать все файлы), например:
Пользовательский агент: Googlebot Запретить: Пользовательский агент: Googlebot-Image Disallow: / personal
Возьмем другой пример. Допустим, вам нужна реклама на всех своих страницах, но они не нужны.
страницы, которые будут отображаться в поиске Google.Здесь вы заблокируете Googlebot, но разрешите Mediapartners-Google пользовательский агент, например:
Пользовательский агент: Googlebot Запретить: / Пользовательский агент: Mediapartners-Google Disallow:
Некоторые страницы используют несколько метатегов роботов для указания директив для разных поисковых роботов, например это:
В этом случае Google будет использовать сумму отрицательных директив, а робот Googlebot будет следовать
директивы noindex и nofollow . Более подробная информация о том, как Google сканирует и индексирует ваш сайт.
Более подробная информация о том, как Google сканирует и индексирует ваш сайт.
Robots.txt Введение и руководство | Центр поиска Google
Что такое файл robots.txt?
Файл robots.txt сообщает сканерам поисковых систем, какие страницы или файлы он может или
не могу запросить с вашего сайта. Это используется в основном для того, чтобы не перегружать ваш сайт
Запросы; это не механизм для защиты веб-страницы от Google. Чтобы веб-страница не попала в Google, вы должны использовать директив noindex ,
или защитите свою страницу паролем.
Для чего используется файл robots.txt?
Файл robots.txt используется в основном для управления трафиком сканера на ваш сайт, а обычно для хранения файла вне Google, в зависимости от типа файла:
| Тип файла | Управление движением | Скрыть от Google | Описание |
|---|---|---|---|
| Интернет-страница | Для веб-страниц (HTML, PDF или другие форматы, не относящиеся к мультимедиа, которые может читать Google), файл robots. Вы не должны использовать файл robots.txt как средство, чтобы скрыть свои веб-страницы от результатов поиска Google. Это связано с тем, что, если другие страницы указывают на вашу страницу с описательным текстом, ваша страница все равно может быть проиндексирована без посещения страницы. Если вы хотите заблокировать свою страницу из результатов поиска, используйте другой метод, например защиту паролем или директиву Если ваша веб-страница заблокирована файлом robots.txt , она все равно может отображаться в результатах поиска, но результат поиска не будет иметь описания и будет выглядеть примерно так. Файлы изображений, видеофайлы, PDF-файлы и другие файлы, отличные от HTML, будут исключены. | ||
| Медиа-файл | Используйте robots.txt для управления трафиком сканирования, а также для предотвращения появления файлов изображений, видео и аудио в результатах поиска Google. (Обратите внимание, что это не помешает другим страницам или пользователям ссылаться на ваш файл изображения / видео / аудио.) | ||
| Файл ресурсов | Вы можете использовать файл robots.txt для блокировки файлов ресурсов, таких как неважные изображения, скрипты или файлы стилей, , если вы считаете, что страницы, загруженные без этих ресурсов, не пострадают от потери .Однако, если отсутствие этих ресурсов затрудняет понимание страницы поисковым роботом Google, вы не должны блокировать их, иначе Google не сможет хорошо проанализировать страницы, зависящие от этих ресурсов. |
 txt можно использовать для управления сканирующим трафиком, если вы считаете, что ваш сервер будет перегружен запросами от поискового робота Google, или чтобы избежать сканирования неважных или похожих страниц на вашем сайте.
txt можно использовать для управления сканирующим трафиком, если вы считаете, что ваш сервер будет перегружен запросами от поискового робота Google, или чтобы избежать сканирования неважных или похожих страниц на вашем сайте. Если вы видите этот результат поиска для своей страницы и хотите его исправить, удалите запись robots.txt, блокирующую страницу. Если вы хотите полностью скрыть страницу от поиска, воспользуйтесь другим методом.
Если вы видите этот результат поиска для своей страницы и хотите его исправить, удалите запись robots.txt, блокирующую страницу. Если вы хотите полностью скрыть страницу от поиска, воспользуйтесь другим методом.Я пользуюсь услугами хостинга сайтов
Если вы используете службу хостинга веб-сайтов, такую как Wix, Drupal или Blogger, вам может не потребоваться (или у вас будет возможность) напрямую редактировать файл robots.txt. Вместо этого ваш провайдер может открыть страницу настроек поиска или какой-либо другой механизм, чтобы сообщить поисковым системам, сканировать ли вашу страницу или нет.
Чтобы узнать, просканировала ли ваша страница Google, найдите URL-адрес страницы в Google.
Если вы хотите скрыть (или показать) свою страницу от поисковых систем, добавьте (или удалите) любую страницу входа в систему. требования, которые могут существовать, и поиск инструкций по изменению вашей страницы видимость в поисковых системах на вашем хостинге, например: wix скрыть страницу от поисковых систем
Ознакомьтесь с ограничениями файла robots.
 txt
txtПрежде чем создавать или редактировать файл robots.txt, вы должны знать ограничения этого метода блокировки URL. Иногда вам может потребоваться рассмотреть другие механизмы, чтобы гарантировать, что ваши URL-адреса не будут найдены в Интернете.
- Директивы Robots.txt могут поддерживаться не всеми поисковыми системами.
Инструкции в файлах robots.txt не могут обеспечить поведение сканера на вашем сайте; гусеничный робот должен им подчиняться. В то время как робот Googlebot и другие уважаемые веб-сканеры подчиняются инструкциям в файле robots.txt, другие сканеры могут этого не делать.Поэтому, если вы хотите защитить информацию от веб-сканеров, лучше использовать другие методы блокировки, такие как защита паролем личных файлов на вашем сервере. - Разные поисковые роботы по-разному интерпретируют синтаксис
Хотя уважаемые веб-сканеры следуют директивам в файле robots.txt, каждый поисковый робот может интерпретировать директивы по-разному. Вы должны знать правильный синтаксис для обращения к разным поисковым роботам, поскольку некоторые из них могут не понимать определенные инструкции.
Вы должны знать правильный синтаксис для обращения к разным поисковым роботам, поскольку некоторые из них могут не понимать определенные инструкции. - Роботизированная страница все еще может быть проиндексирована, если на нее есть ссылки с других сайтов
Хотя Google не будет сканировать и индексировать контент, заблокированный файлом robots.txt, мы все равно можем найти и проиндексировать запрещенный URL, если на него есть ссылка с другого места в сети. В результате URL-адрес и, возможно, другая общедоступная информация, такая как текст привязки в ссылках на страницу, может по-прежнему отображаться в результатах поиска Google. Чтобы правильно предотвратить появление вашего URL в результатах поиска Google, вы должны защитить паролем файлы на своем сервере или использовать метатегnoindexили заголовок ответа (или полностью удалить страницу).
 Узнайте, как совместить сканирование с директивами индексирования / обслуживания.
Узнайте, как совместить сканирование с директивами индексирования / обслуживания.Тестирование страницы на наличие блоков robots.txt
Вы можете проверить, заблокирована ли страница или ресурс правилом robots.txt.
Для проверки директив noindex используйте инструмент проверки URL.
Файл Robots.txt [Примеры 2021] — Moz
Что такое robots.txt файл?
Robots.txt — это текстовый файл, который веб-мастера создают, чтобы проинструктировать веб-роботов (обычно роботов поисковых систем), как сканировать страницы на их веб-сайтах. Файл robots.txt является частью протокола исключения роботов (REP), группы веб-стандартов, которые регулируют, как роботы сканируют Интернет, получают доступ и индексируют контент, а также предоставляют этот контент пользователям. REP также включает в себя такие директивы, как мета-роботы, а также инструкции для страницы, подкаталога или сайта о том, как поисковые системы должны обрабатывать ссылки (например, «следовать» или «nofollow»).
На практике файлы robots.txt указывают, могут ли определенные пользовательские агенты (программное обеспечение для веб-сканирования) сканировать части веб-сайта. Эти инструкции сканирования определяются как «запрещающие» или «разрешающие» поведение определенных (или всех) пользовательских агентов.
Базовый формат:User-agent: [user-agent name] Disallow: [URL-строка не должна сканироваться]
Вместе эти две строки считаются полным файлом robots.txt, хотя один файл robots может содержат несколько строк пользовательских агентов и директив (т.е., запрещает, разрешает, задержки сканирования и т. д.).
В файле robots.txt каждый набор директив пользовательского агента отображается как дискретный набор , разделенных разрывом строки:
В файле robots.txt с несколькими директивами пользовательского агента, каждое запрещающее или разрешающее правило только применяется к агенту (ам) пользователя, указанному в этом конкретном наборе, разделенном разрывом строки. Если файл содержит правило, которое применяется более чем к одному пользовательскому агенту, поисковый робот будет , только обратит внимание (и будет следовать директивам в) самой конкретной группы инструкций .
Если файл содержит правило, которое применяется более чем к одному пользовательскому агенту, поисковый робот будет , только обратит внимание (и будет следовать директивам в) самой конкретной группы инструкций .
Вот пример:
Msnbot, discobot и Slurp вызываются специально, поэтому эти пользовательские агенты только обратят внимание на директивы в своих разделах файла robots.txt. Все остальные пользовательские агенты будут следовать директивам в группе user-agent: *.
Пример robots.txt:
Вот несколько примеров использования robots.txt для сайта www.example.com:
URL файла Robots.txt: www.example.com/robots.txt Блокировка всех поисковых роботов для доступа ко всему содержимомуАгент пользователя: * Disallow: /
Использование этого синтаксиса в файле robots.txt укажет всем поисковым роботам не сканировать никакие страницы www. example .com, включая домашнюю страницу.
example .com, включая домашнюю страницу.
User-agent: * Disallow:
Использование этого синтаксиса в файле robots.txt указывает поисковым роботам сканировать все страницы на www.example.com, включая домашнюю страницу.
Блокировка определенного поискового робота из определенной папкиUser-agent: Googlebot Disallow: / example-subfolder /
Этот синтаксис сообщает только поисковому роботу Google (имя агента пользователя Googlebot) не сканировать страницы, которые содержать строку URL www.example.com/example-subfolder/.
Блокировка определенного веб-сканера с определенной веб-страницыПользовательский агент: Bingbot Disallow: /example-subfolder/blocked-page.html
Этот синтаксис сообщает только поисковому роботу Bing (имя пользовательского агента Bing) избегать сканирование конкретной страницы www. example.com/example-subfolder/blocked-page.html.
example.com/example-subfolder/blocked-page.html.
Как работает robots.txt?
Поисковые системы выполняют две основные задачи:
- Сканирование Интернета для обнаружения контента;
- Индексирование этого контента, чтобы его могли обслуживать искатели, ищущие информацию.
Чтобы сканировать сайты, поисковые системы переходят по ссылкам с одного сайта на другой — в конечном итоге просматривая многие миллиарды ссылок и веб-сайтов. Такое ползание иногда называют «пауками».”
После перехода на веб-сайт, но перед его сканированием поисковый робот будет искать файл robots.txt. Если он найдет его, сканер сначала прочитает этот файл, прежде чем продолжить просмотр страницы. Поскольку файл robots.txt содержит информацию о , как должна сканировать поисковая система, найденная там информация будет указывать дальнейшие действия поискового робота на этом конкретном сайте. Если файл robots.txt содержит , а не , содержащие директивы, запрещающие действия пользовательского агента (или если на сайте нет файла robots. txt), он продолжит сканирование другой информации на сайте.
txt), он продолжит сканирование другой информации на сайте.
Другой быстрый файл robots.txt, который необходимо знать:
(более подробно обсуждается ниже)
Чтобы его можно было найти, файл robots.txt должен быть помещен в каталог верхнего уровня веб-сайта.
Robots.txt чувствителен к регистру: файл должен иметь имя «robots.txt» (не Robots.txt, robots.TXT и т. Д.).
Некоторые пользовательские агенты (роботы) могут игнорировать ваш robots.txt файл. Это особенно характерно для более гнусных поисковых роботов, таких как вредоносные роботы или парсеры адресов электронной почты.
Файл /robots.txt является общедоступным: просто добавьте /robots.txt в конец любого корневого домена, чтобы увидеть директивы этого веб-сайта (если на этом сайте есть файл robots.txt!). Это означает, что любой может видеть, какие страницы вы хотите или не хотите сканировать, поэтому не используйте их для сокрытия личной информации пользователя.

Каждый субдомен в корневом домене использует отдельных роботов.txt файлы. Это означает, что и blog.example.com, и example.com должны иметь свои собственные файлы robots.txt (по адресу blog.example.com/robots.txt и example.com/robots.txt).
Обычно рекомендуется указывать расположение любых карт сайта, связанных с этим доменом, в нижней части файла robots.txt. Вот пример:
Технический синтаксис robots.txt
Синтаксис robots.txt можно рассматривать как «язык» файлов robots.txt. Есть пять общих терминов, которые вы, вероятно, встретите в файле robots.К ним относятся:
User-agent: Конкретный поисковый робот, которому вы даете инструкции для сканирования (обычно это поисковая система). Список большинства пользовательских агентов можно найти здесь.
Disallow: Команда, используемая для указания агенту пользователя не сканировать определенный URL. Для каждого URL разрешена только одна строка «Disallow:».

Разрешить (применимо только для робота Googlebot): команда, сообщающая роботу Googlebot, что он может получить доступ к странице или подпапке, даже если его родительская страница или подпапка могут быть запрещены.
Crawl-delay: Сколько секунд сканер должен ждать перед загрузкой и сканированием содержимого страницы. Обратите внимание, что робот Googlebot не подтверждает эту команду, но скорость сканирования можно установить в консоли поиска Google.
Sitemap: Используется для вызова местоположения любых XML-файлов Sitemap, связанных с этим URL. Обратите внимание, что эта команда поддерживается только Google, Ask, Bing и Yahoo.
Сопоставление с шаблоном
Когда дело доходит до фактических URL-адресов для блокировки или разрешения, robots.txt могут быть довольно сложными, поскольку они позволяют использовать сопоставление с шаблоном для охвата диапазона возможных вариантов URL. И Google, и Bing уважают два регулярных выражения, которые можно использовать для идентификации страниц или подпапок, которые оптимизатор поисковых систем хочет исключить. Эти два символа — звездочка (*) и знак доллара ($).
И Google, и Bing уважают два регулярных выражения, которые можно использовать для идентификации страниц или подпапок, которые оптимизатор поисковых систем хочет исключить. Эти два символа — звездочка (*) и знак доллара ($).
- * — это подстановочный знак, который представляет любую последовательность символов.
- $ соответствует концу URL-адреса
Google предлагает здесь большой список возможных синтаксисов и примеров сопоставления с образцом.
Где находится файл robots.txt на сайте?
Когда бы они ни заходили на сайт, поисковые системы и другие роботы, сканирующие Интернет (например, сканер Facebook Facebot), знают, что нужно искать файл robots.txt. Но они будут искать этот файл в только в одном конкретном месте : в основном каталоге (обычно в корневом домене или на домашней странице). Если пользовательский агент посещает www.example.com/robots.txt и не находит там файла роботов, он будет считать, что на сайте его нет, и продолжит сканирование всего на странице (и, возможно, даже на всем сайте. ).Даже если страница robots.txt действительно существует, например, по адресу example.com/index/robots.txt или www.example.com/homepage/robots.txt, она не будет обнаружена пользовательскими агентами и, следовательно, сайт будет обрабатываться так, как если бы в нем вообще не было файла robots.
).Даже если страница robots.txt действительно существует, например, по адресу example.com/index/robots.txt или www.example.com/homepage/robots.txt, она не будет обнаружена пользовательскими агентами и, следовательно, сайт будет обрабатываться так, как если бы в нем вообще не было файла robots.
Чтобы гарантировать, что ваш файл robots.txt найден, всегда включает его в свой основной каталог или корневой домен.
Зачем нужен robots.txt?
Файлы Robots.txt управляют доступом сканера к определенным областям вашего сайта.Хотя это может быть очень опасно, если вы случайно запретите роботу Googlebot сканировать весь ваш сайт (!!), в некоторых ситуациях файл robots.txt может оказаться очень полезным.
Некоторые распространенные варианты использования включают:
- Предотвращение появления дублированного контента в результатах поиска (обратите внимание, что мета-роботы часто являются лучшим выбором для этого)
- Сохранение конфиденциальности целых разделов веб-сайта (например, промежуточный сайт вашей группы инженеров)
- Предотвращение показа страниц результатов внутреннего поиска в общедоступной поисковой выдаче
- Указание местоположения карты (карт) сайта
- Предотвращение индексирования поисковыми системами определенных файлов на вашем веб-сайте (изображений, PDF-файлов и т.
 Д.))
Д.)) - Указание задержки сканирования для предотвращения перегрузки ваших серверов, когда сканеры загружают сразу несколько частей контента
Если на вашем сайте нет областей, к которым вы хотите контролировать доступ агента пользователя, вы не можете вообще нужен файл robots.txt.
Проверка наличия файла robots.txt
Не уверены, есть ли у вас файл robots.txt? Просто введите свой корневой домен, а затем добавьте /robots.txt в конец URL-адреса. Например, файл роботов Moz находится по адресу moz.ru / robots.txt.
Если страница .txt не отображается, значит, у вас нет (активной) страницы robots.txt.
Как создать файл robots.txt
Если вы обнаружили, что у вас нет файла robots.txt или вы хотите изменить свой, создание его — простой процесс. В этой статье от Google рассматривается процесс создания файла robots.txt, и этот инструмент позволяет вам проверить, правильно ли настроен ваш файл.
Хотите попрактиковаться в создании файлов роботов? В этом сообщении блога рассматриваются некоторые интерактивные примеры.
Лучшие методы SEO
Убедитесь, что вы не блокируете какой-либо контент или разделы своего веб-сайта, которые нужно просканировать.
Ссылки на страницах, заблокированных файлом robots.txt, переходить не будут. Это означает 1.) Если на них также не ссылаются другие страницы, доступные для поисковых систем (т. Е. Страницы, не заблокированные через robots.txt, мета-роботы или иным образом), связанные ресурсы не будут сканироваться и не могут быть проиндексированы. 2.) Никакой ссылочный капитал не может быть передан с заблокированной страницы на место назначения ссылки.Если у вас есть страницы, на которые вы хотите передать средства, используйте другой механизм блокировки, отличный от robots.txt.
Не используйте robots.txt для предотвращения появления конфиденциальных данных (например, личной информации пользователя) в результатах поисковой выдачи. Поскольку другие страницы могут напрямую ссылаться на страницу, содержащую личную информацию (таким образом, в обход директив robots.
 txt в вашем корневом домене или домашней странице), она все равно может быть проиндексирована. Если вы хотите заблокировать свою страницу из результатов поиска, используйте другой метод, например защиту паролем или метадирективу noindex.
txt в вашем корневом домене или домашней странице), она все равно может быть проиндексирована. Если вы хотите заблокировать свою страницу из результатов поиска, используйте другой метод, например защиту паролем или метадирективу noindex.Некоторые поисковые системы имеют несколько пользовательских агентов. Например, Google использует Googlebot для обычного поиска и Googlebot-Image для поиска изображений. Большинство пользовательских агентов из одной и той же поисковой системы следуют одним и тем же правилам, поэтому нет необходимости указывать директивы для каждого из нескольких сканеров поисковой системы, но такая возможность позволяет вам точно настроить способ сканирования содержания вашего сайта.
Поисковая система кэширует содержимое robots.txt, но обычно обновляет кэшированное содержимое не реже одного раза в день.Если вы изменили файл и хотите обновить его быстрее, чем это происходит, вы можете отправить свой URL-адрес robots.txt в Google.
Robots.
 txt против мета-роботов против x-роботов
txt против мета-роботов против x-роботовТак много роботов! В чем разница между этими тремя типами инструкций для роботов? Во-первых, robots.txt — это фактический текстовый файл, тогда как мета и x-роботы — это метадирективы. Помимо того, чем они являются на самом деле, все три выполняют разные функции. Файл robots.txt определяет поведение сканирования сайта или всего каталога, тогда как мета и x-роботы могут определять поведение индексации на уровне отдельной страницы (или элемента страницы).
Продолжайте учиться
Приложите свои навыки к работе
Moz Pro может определить, блокирует ли ваш файл robots.txt доступ к вашему веб-сайту. Попробовать >>
DLR — Институт робототехники и мехатроники
Работая над высокомобильным исследовательским роботом на ногах, DLR Crawler является первой экспериментальной платформой для тестирования различных алгоритмов управления и походки, а также различных подходов к визуальной навигации. В качестве ног робота используются пальцы DLR Hand II, что обеспечивает уникальное сочетание высокой эффективности срабатывания и широкого набора встроенных датчиков.
В качестве ног робота используются пальцы DLR Hand II, что обеспечивает уникальное сочетание высокой эффективности срабатывания и широкого набора встроенных датчиков.
Робот впервые был представлен публике в 2008 году.
Технические характеристики
| Размер: | Площадь основания: 35 см x 38 см, дорожный просвет: до 12 см |
| Масса: | 3,66 кг |
| Степени свободы: | 18 активных суставов ног |
| Полезная нагрузка: | 3 кг |
| Скорость: | до 20 см / с |
| Электропитание: | внешнее питание 24 В |
| Вычисление: | ПК внешнего управления и навигации; быстрое соединение SpaceWire замыкает контур управления 1 кГц |
| Датчики: | • шарниры: датчик Холла со стороны двигателя, потенциометр и датчик крутящего момента со стороны тяги, датчик температуры • ступня: датчик силы-момента с 6 степенями свободы • корпус: IMU, стереокамера |
| Пользовательский интерфейс: | • космическая мышь для прямого управления • автономная навигация по путевой точке к заданной цели |
Описание системы
Нацелен на наземные и внеземные исследования, все алгоритмы, связанные с перемещением и навигацией, разработанные для DLR Crawler, ориентированы на надежную автономную работу в априори неизвестных средах с отказом от GPS.

Krabbler — Bildergalerie
Гусеничный трактор DLR
Гусеничный трактор DLR
Кредит: DLR CC-BY 3.0.
Гусеничный DLR на испытательном стенде в помещении
Гусеничный трактор DLR перемещается по гравийному полю с различными каменными препятствиями.
Кредит: DLR CC-BY 3.0.
Гусеничный корабль DLR в Лаборатории исследования планет (PEL)
Гусеничный DLR самостоятельно преодолевает узкий проход в Лаборатории исследования планет.
Кредит: DLR CC-BY 3.0.
Краулер DLR в поисково-спасательной испытательной зоне
Сканер DLR составляет карту поисково-спасательной тестовой области.

Кредит: DLR CC-BY 3.0.
- M. Görner et al. , «Одометрия с шестью степенями свободы на основе проприоцепции ноги для статически устойчивых шагающих роботов» в Autonomous Robots , 34 (4), стр. 311–326, Springer, 2013.
- A. Stelzer et al. , «Навигация шестиногого шагающего робота на основе стереозрения в неизвестной пересеченной местности», в Международном журнале исследований робототехники , специальный выпуск о зрении роботов, 31 (4), стр.381–402, 2012.
- A. Chilian et al. , «Объединение мультисенсорных данных для надежной оценки положения шестиногого шагающего робота», в Международная конференция IEEE / RSJ по интеллектуальным роботам и системам , Сан-Франциско, Калифорния, США, 2011.
- M. Görner et al. , «Анализ и оценка устойчивости биоустойчивой походки, устойчивой к потере ног для шагающих роботов с шестью и восемью ногами», в Международная конференция IEEE по робототехнике и автоматизации , стр.
 1525–1531, 2010.
1525–1531, 2010. - M. Görner et al., «Гусеничный DLR: оценка походок и контроль активно совместимого шестиногого шагающего робота», Industrial Robot: An International Journal , 36 (4), pp. 344–351 , 2009.
- M. Görner et al. , «DLR-Crawler: испытательный стенд для активно-совместимой ходьбы шестиугольников на основе пальцев DLR-Hand II», в Международная конференция IEEE / RSJ по интеллектуальным роботам и системам , стр.1525–1531, 2008.
Контакт
| Др. Инж. Мартин Гёрнер Немецкий аэрокосмический центр Институт робототехники и мехатроники, анализ и управление передовыми робототехническими системами Оберпфаффенхофен-Весслинг Тел .: +49 8153 28-1089 Факс: +49 8153 28-1134 |
Роботизированный гусеничный робот осматривает бетонные конструкции
Правильно обслуживаемые бетонные конструкции для охлаждения, герметизации и водохранилища имеют важное значение для долгосрочной безопасности и эксплуатации пароэлектрических электростанций, гидроэнергетических объектов и других промышленных объектов. Однако многим из этих бетонных конструкций не менее 40 лет, и они начинают разрушаться. Это включает в себя критически важные конструкции, такие как градирни, здания ядерной защиты, реакторные полости, бассейны отработавшего топлива, плотины гидроэлектростанций и фундаменты ветряных турбин. Большая часть деградации вызвана плохой практикой строительства, но недостатки конструкции и устаревшие методы эксплуатации и обслуживания также могут повредить бетон.
Однако многим из этих бетонных конструкций не менее 40 лет, и они начинают разрушаться. Это включает в себя критически важные конструкции, такие как градирни, здания ядерной защиты, реакторные полости, бассейны отработавшего топлива, плотины гидроэлектростанций и фундаменты ветряных турбин. Большая часть деградации вызвана плохой практикой строительства, но недостатки конструкции и устаревшие методы эксплуатации и обслуживания также могут повредить бетон.
Правильный доступ к ключевым частям конструкции часто затруднен; ручные проверки также трудоемки, дорогостоящи, а иногда и опасны.Проведение этих тестов проще и дешевле с автоматизированными роботизированными сенсорными устройствами, которые также позволяют проводить более частые проверки. Хотя некоторые из этих устройств представлены сегодня на рынке, их возможности и точность обычно ограничены.
Для устранения этих недостатков Исследовательский институт электроэнергетики (EPRI), Шарлотт, Северная Каролина, разработал «роботизированный гусеничный ход по бетону» для проверки труднодоступных бетонных поверхностей. Устройство предназначено для:
Устройство предназначено для:
- Снижение проблем и затрат на осмотр крупных бетонных конструкций
- Повышение безопасности рабочих
- Предоставляет более полные данные о разрушении и старении бетона
- Поддержка долгосрочной эксплуатации ядерных, возобновляемых и ископаемых источников энергии.
Роботизированный гусеничный экскаватор на работе. Изображение: Научно-исследовательский институт электроэнергетики
Добиваясь успеха
Гусеничный робот размером с газонокосилку может взбираться по поверхности крупных энергетических сооружений и оценивать структурную целостность, используя бортовые приборы и технологии неразрушающего контроля для измерения свойств бетона. Он может преодолевать вогнутые, выпуклые или нависающие вертикальные конструкции, неся полезную нагрузку оборудования весом более 40 фунтов.Вакуумная камера создает силу сцепления более 225 фунтов и окружена прокладкой из пенопласта, которая защищает от протечек и способствует движению. Адгезия настолько сильна, что потребуется более 50 фунтов силы, чтобы оторвать робота от гладкой бетонной поверхности.
«Бетонный гусеничный станок использует коммерчески доступную роботизированную платформу, которая является гибкой и может вместить несколько различных типов сенсорных систем, в зависимости от типа деградации, которая влияет на конструкцию», — говорит Мария Гимарайнш, руководитель проекта в ядерном секторе EPRI.Бортовые системы включают технологию одновременной локализации и картографии (SLAM) и передовые инструменты неразрушающего контроля (NDE), разработанные для конкретных приложений.
«Полезная нагрузка передовых приборов неразрушающего контроля обеспечит беспрецедентные возможности для исследования внутренней части бетонных конструкций, определения местоположения и определения характеристик пустот, коррозии арматуры и других внутренних дефектов», — продолжает Гимарайнш. «Закодированные с помощью компьютера данные и изображения будут поддерживать оценку состояния в реальном времени и долгосрочный мониторинг процессов деградации и старения, чтобы направлять принятие решений по техническому обслуживанию и управление с учетом рисков для ядерных, ископаемых и гидроактивных объектов.”
Планы на будущее
В середине июля 2013 года EPRI и Управление энергетики Нью-Йорка (NYPA) провели тестовую проверку своей гидроэлектростанции с использованием роботизированного гусеничного трактора. Развертывание и сбор данных были успешными, включая анализ с использованием термографии, технологии ударного эхо-сигнала с воздушной связью, измерения удельного электрического сопротивления и влажности.
«Мы стремимся применить это исследование, чтобы помочь энергетической отрасли управлять критически важными объектами инфраструктуры, такими как градирни и здания ядерной защиты», — говорит Гимарайнш.«По мере того, как бетонные активы стареют, становится все более важным иметь в наличии разнообразные инструменты мониторинга и инспекции для информирования при принятии решений по обслуживанию и ремонту. Бетонный гусеничный трактор — один из многих инструментов, способных поддержать такие усилия ».
В планы на будущее входит разработка системы автоматизированного контроля и неразрушающего контроля критически важных бетонных конструкций, которая, как надеется Гимараеш, будет готова к коммерческому развертыванию к 2016 году с указанием конкретных приложений. «Тогда цель будет заключаться в проведении инспекций больших вертикальных бетонных конструкций, которые будут более рентабельными, безопасными и менее трудоемкими, чем сегодня», — говорит она.
Марк Кроуфорд — независимый писатель.
В гусеничном ходу для бетона используется коммерчески доступная роботизированная платформа, которая является гибкой и может вместить несколько различных типов сенсорных систем, в зависимости от типа разрушения, влияющего на конструкцию. Мария Гимарайнш, руководитель проекта, Ядерный сектор EPRI
Гусеничный робот Arduino
Этот робот имеет шесть ног и может двигаться вперед, назад, поворачивать налево и верно.Он использует ультразвуковой датчик для обнаружения препятствий и всегда старается идти в направлении с наибольшим пространством. Оборудован ЖК-дисплеем. дисплей для печати отладочной информации. Следующие изображения показывают гусеничный робот.
При включении робот совершает случайное блуждание, сначала решая идти ли вперед, влево или вправо случайным образом, а затем решить, сколько шаги, чтобы пойти в этом направлении, опять же, случайным образом. Если ультразвуковой датчик обнаруживает препятствие впереди, робот останавливается, а затем использует ультразвуковой датчик для сканирования переднего пространства на 180 градусов, чтобы определить следующее правильное направление — направление с наибольшим пространством.
#include#include «LCD12864RSPI.h»
// Отображение китайских символов
unsigned char currentOrder [] = {0xC3, 0xFC, 0xC1, 0xEE, ‘:’};
символ без знака слева [] = {0xD7, 0xF3, 0xD7, 0xAA};
беззнаковый символ справа [] = {0xD3, 0xD2, 0xD7, 0xAA};
беззнаковый символ вперед [] = {0xCF, 0xF2, 0xC7, 0xB0};
символ без знака назад [] = {0xCF, 0xF2, 0xBA, 0xF3};
беззнаковый символ forwardBackward [] = {0xC7, 0xB0, 0xBA, 0xF3};
беззнаковый символ stepCount [] = {0xB2, 0xBD, 0xCA, 0xFD, ‘:’};
беззнаковый символ stepLabel [] = {0xB2, 0xBD};
// Структура для определения движения
// Движение, например, слева, состоит из нескольких фаз.
typedef struct Movement {
int dir; // Идентификатор для обозначения типа движения: 0 left; 1 правая; 2 вперед; 3 назад; 4 инициализировать.
int * раз; // время в миллисекундах, используемое для выполнения каждой фазы движения
char ** servos; // серво управление положением
int phase; // количество фаз в одном движении
int stepCount; // количество шагов для данного типа движения.
};
Механизм rMove; // Движение вправо
Движение lMove; // Движение влево
Движение fMove; // Движение вперед
Движение bMove; // Движение назад
Движение iMove; // Инициализация движения
// Позиции сервоприводов для каждого типа движения
char * lServos [] = {«# 1 P1200 # 4 P1200», «# 0 P700 S1500 # 3 P2300 S1500», «# 1 P1500 S1000 # 4 P1500 S1000 «,» # 0 P1500 # 3 P1500 «};
char * rServos [] = {«# 1 P2100 # 4 P2100», «# 0 P700 S1500 # 3 P2300 S1500», «# 1 P1500 S1000 # 4 P1500 S1500», «# 0 P1500 # 3 P1500»};
char * fServos [] = {«# 1 P2000 # 4 P1000», «# 0 P700 S1500 # 3 P2300 S1500», «# 1 P700 S1000 # 4 P2300 S1000», «# 0 P1500 # 3 P1500»};
char * bServos [] = {«# 1 P1000 # 4 P2000», «# 0 P700 S1500 # 3 P2300 S1500», «# 1 P2300 S1000 # 4 P700 S1000», «# 0 P1500 # 3 P1500»};
char * iServos [] = {«# 0 P1500 # 1 P1500 # 2 P1500 # 3 P1500 # 4 P1500 # 5 P1500»};
// Время, используемое для каждой фазы каждого движения.
int lTimes [] = {200, 200, 200, 200};
int rTimes [] = {200, 200, 400, 200};
int fTimes [] = {300, 400, 500, 300};
int bTimes [] = {300, 400, 800, 300};
int iTimes [] = {500};
// Положение для отображения сообщений.
int messagePosition [8] = {2, 5, 1, 5, 3, 5, 3, 5};
логическое shouldChangeDirection = false; // Следует ли использовать следующее движение для изменения направления в случае обнаружения препятствия ультразвуковым датчиком.
логическое значение isForward = true; // Если текущее направление вперед
int EN = 2; // Номер контакта для включения платы расширения XBee V5
// Измерьте расстояние с помощью ультразвукового датчика URM04V2.
void measureDistance (байтовое устройство) {
digitalWrite (EN, HIGH);
// Измерение расстояния срабатывания.
uint8_t DScmd [6] = {0x55,0xaa, device, 0x00,0x01,0x00};
для (int i = 0; i <6; i ++) {
Serial.write (DScmd [i]);
DScmd [5] + = DScmd [i];
}
задержка (30);
// Отправить команду для чтения измеренного расстояния.
uint8_t STcmd [6] = {0x55,0xaa, device, 0x00,0x02,0x00};
для (int i = 0; i <6; i ++) {
Serial.write (STcmd [i]);
STcmd [5] + = STcmd [i];
}
задержка (3);
}
// Возвращает последнее измеренное расстояние ультразвуковым датчиком URM04V2.
// -1 означает, что последнее измерение вне допустимого диапазона или безуспешно.
int readDistance () {
uint8_t data [8];
digitalWrite (EN, LOW);
boolean done = false;
int counter = 0;
int result = -1;
пока (! Готово) {
int bytes = Serial.available ();
if (bytes == 8) {
for (int i = 0; i <8; i ++) {
data [i] = Serial.read ();
}
результат = (целое) данные [5] * 256 + данные [6];
сделано = правда;
} else {
задержка (10);
счетчик ++;
if (counter == 5) {
done = true;
}
}
}
результат возврата;
}
// Выполните движение m, повторяя его много раз.
логическое значение performMovement (struct Movement * m, int steps) {
логическое inChange = false;
if (shouldChangeDirection) {
inChange = true;
}
для (int s = 0; s
Serial3.println (m-> servos [i]);
задержка (m-> раз [i]);
if (! InChange) {
changeHeading ();
if (shouldChangeDirection) {
return shouldChangeDirection;
}
}
}
m-> stepCount ++;
целое число = 0;
if (m-> dir == 3 || m-> dir == 4) {
number = fMove.stepCount + bMove.stepCount;
} else {
число = m-> stepCount;
}
if (m-> dir! = 5) {
displayNumber (messagePosition [m-> dir * 2], messagePosition [m-> dir * 2 + 1], number);
}
}
if (inChange) {
shouldChangeDirection = false;
}
возвращает ложь;
}
void setup ()
{
lMove.servos = lServos;
lMove.times = lTimes;
lMove.phases = 4;
lMove.stepCount = 0;
lMove.dir = 0; // Влево
rMove.servos = rServos;
rMove.times = rTimes;
rMove.phases = 4;
rMove.stepCount = 0;
rMove.dir = 1; // Право
fMove.servos = fServos;
fMove.times = fTimes;
fMove.phases = 4;
fMove.stepCount = 0;
fMove.dir = 2; // Форвард
bMove.servos = bServos;
bMove.times = bTimes;
bMove.phases = 4;
bMove.stepCount = 0;
bMove.dir = 3; // Назад
iMove.servos = iServos;
iMove.times = iTimes;
iMove.phases = 1;
iMove.stepCount = 0;
iMove.dir = 5;
randomSeed (analogRead (0));
// Инициализировать ЖК-дисплей.
LCDA.Initialise ();
задержка (100);
LCDA.CLEAR ();
LCDA.DisplayString (0, 0, currentOrder, 5);
LCDA.DisplayString (1, 0, слева, 4);
LCDA.DisplayString (1, 2, stepCount, 5);
LCDA.DisplayString (2, 0, справа, 4);
LCDA.DisplayString (2, 2, stepCount, 5);
LCDA.DisplayString (3, 0, forwardBackward, 4);
LCDA.DisplayString (3, 2, stepCount, 5);
// Инициализируйте все сервоприводы в нейтральное положение.
Serial3.begin (115200);
Serial3.println («# 0 P1500 # 1 P1500 # 2 P1500 # 3 P1500 # 4 P1500 # 5 P1500 # 6 P1500 # 7 P600»);
pinMode (EN, ВЫХОД);
Serial.begin (19200);
задержка (200);
digitalWrite (EN, HIGH);
задержка (2000 г.);
}
void changeHeading () {
measureDistance (0x11);
int distance = readDistance ();
if (distance! = — 1) {
if (isForward) {
if (distance <15) {
shouldChangeDirection = true;
}
} else {
}
}
}
// Отображение текущего заказа.
void displayCurrentOrder (unsigned char * order, int steps) {
LCDA.DisplayString (0, 3, order, 4);
String txt = String (шаги);
char * buf = «»;
txt.toCharArray (buf, 4);
buf [2] = 0xB2;
buf [3] = 0xBD;
LCDA.DisplayString (0, 5, (символ без знака *) buf, 4);
}
// Отображение числа в строке и столбце.
void displayNumber (int row, int column, int number) {
String txt = String (число);
char * buf = «»;
txt.toCharArray (buf, 5);
LCDA.DisplayString (строка, столбец, (символ без знака *) buf, txt.length ());
}
// Поверните робота вправо.
void turnRight (длинные шаги) {
displayCurrentOrder (right, steps);
performMovement (& rMove, шаги);
}
// Поверните робота влево.
void turnLeft (длинные шаги) {
displayCurrentOrder (left, steps);
performMovement (& lMove, шаги);
}
// Переместите робота вперед.
void goForward (длинные шаги) {
displayCurrentOrder (вперед, шаги);
performMovement (& fMove, шаги);
}
// Переместите робота назад.
void goBackward (длинные шаги) {
displayCurrentOrder (назад, шаги);
isForward = false;
performMovement (& bMove, шаги);
isForward = true;
}
long lastMove = 0;
длинный ход = 0;
// Проверьте, в какую сторону идти дальше, найдя направление, в котором препятствие находится дальше всего.
// каталоги будут настроены этой функцией.
// dirs — это целочисленный массив с двумя элементами.
// Первый элемент указывает тип движений (1 ~ 4)
// Второй элемент указывает количество шагов, которые нужно сделать в этом направлении.
void checkDistance (int * dirs) {
performMovement (& iMove, 1);
shouldChangeDirection = true;
Serial3.println («# 6 P600»);
задержка (500);
int j = 0;
int maxDis = -1;
int dir = 0;
для (int i = 600; i <= 2400; i + = 150) {
Serial3.print («# 6P»);
Serial3.println (i);
задержка (200);
measureDistance (0x11);
интервал d = readDistance ();
, если (d == — 1) {
d = 400;
}
if (d> maxDis) {
maxDis = d;
dir = i;
}
}
Последовательный 3.println («# 6 P1500»);
задержка (500);
if (maxDis <40) {
// Измерьте расстояние назад.
Serial3.println («# 7 P2400»);
задержка (500);
measureDistance (0x11);
интервал bd = readDistance ();
Serial3.println («# 7 P600»);
задержка (500);
, если (bd> 40) {
dirs [0] = 4;
dirs [1] = (int) random (5, 10);
} else {
dirs [0] = 2;
dirs [1] = 5;
}
} else {
if (dir> 0) {
dir = (dir — 600) / 150;
if (dir <6) {
dirs [0] = 1;
директории [1] = (6-директория);
} иначе, если (каталог> 6) {
каталог [0] = 2;
dirs [1] = dir — 6;
} else {
dirs [0] = 3;
dirs [1] = (int) random (5, 10);
}
} else {
dirs [0] = 4;
dirs [1] = 2;
}
}
}
int steps = 0;
void loop () {
steps = 0;
if (shouldChangeDirection) {
int dirs [] = {0, 0};
checkDistance (dirs);
move = dirs [0];
шагов = dirs [1];
} else {
move = random (1, 4);
if (lastMove == 1 || lastMove == 2) {
move = 3;
} else if (lastMove == 0) {
move = 3;
}
}
if (move == 1) {
if (steps == 0) {
steps = (int) random (3, 6);
}
turnLeft ((int) steps);
}
else if (move == 2) {
if (steps == 0) {
steps = (int) random (3, 6);
}
turnRight (ступеньки);
}
else if (move == 4) {
if (steps == 0) {
steps = (int) random (5, 15);
}
назад (ступеньки);
}
else {
if (steps == 0) {
steps = (int) random (5, 15);
}
goForward (шаги);
}
lastMove = перемещение;
}
Как я могу построить ползущего робота?
Как я могу построить ползущего робота?
Когда краулер — правильный выбор?
Краулеры обладают меньшим количеством функций, чем скребки, но компенсируют это тем, что работают намного быстрее.Используйте сканеры, когда нужные вам данные доступны без поддержки JavaScript, для навигации по веб-сайту используются обычные HTML-ссылки (теги с href) и доступны в виде простых списков, страниц с подробными сведениями или аналогичных согласованных макетов. Выбирая между поисковым роботом или парсером для конкретной задачи, оцените страницу и информацию, которая вам нужна.
Если вы ответите утвердительно на все следующие вопросы, поисковый робот может быть лучшим выбором, чем парсер:
Может ли страница работать без Javascript?
Доступна ли навигация по странице с помощью тегов ?
Находится ли вся необходимая информация на страницах одного типа, например, на странице сведений о продукте или в перечне продуктов?
Создание поискового робота
Поисковые роботы определяются с использованием процессоров страниц , а не шагов скребка.Обработчик страницы — это набор правил, управляющих поведением поискового робота. Без обработчиков страниц поисковый робот просто посещает все страницы веб-сайта, не извлекая при этом абсолютно никакой информации. Вы можете определить любое количество процессоров страниц, при этом каждый процессор страниц состоит из двух разделов конфигурации: условий и действий .
Условия
Условия определяют, выполняется ли обработчик страниц для данной веб-страницы. Все обработчики страниц проверяются на каждой странице, которую посещает поисковый робот, и, если они совпадают, применяются настроенные поисковым роботом действия.Вы можете добавить любое количество условий к веб-странице, чтобы убедиться, что она соответствует только тем страницам, которые вы хотите. Все определенные условия для обработчика страниц должны возвращать значения true , прежде чем настроенные действия будут применены к данной веб-странице. .
Действия
Действия определяют действия поискового робота при посещении данной веб-страницы, такие как извлечение определенной информации или добавление обнаруженных URL-адресов в список сканирования.
Как сканер определяет, на какие страницы перейти?
По умолчанию сканер посещает каждую страницу, на которую указывает тег в любом месте страницы и которая находится в том же домене, что и начальный URL.Мы называем список страниц, которые будет посещать сканер, списком сканирования.
Вы можете управлять работой поискового робота через веб-сайт, создав обработчик страниц с условием Сопоставить каждую страницу и действием Не переходите по ссылкам на странице . Только это заставит поисковый робот посетить только первую страницу по начальному URL.
Затем вы можете добавить другой обработчик страниц, соответствующий первой странице, и выбрать действие Добавить атрибут url в список сканирования , включая селекторы CSS для соответствия всем тегам , связанным со ссылками, которые должен посещать поисковый робот.Это позволяет вам точно определять, какие ссылки на каких типах страниц вы хотите, чтобы поисковый робот обрабатывал, значительно ускоряя выполнение и избегая потенциального извлечения данных мусора.