Нормативные требования к рулевому управлению
Требования к элементам рулевого управления транспортных средств регламентируются Правилами ЕЭК ООН №79. Этот документ содержит в основном конструктивные требования к данным элементам. Основные эксплуатационные требования, согласно которым и проводится проверка технического состояния рулевого управления, изложены в СТБ 1641-2006.
Суммарный люфт в рулевом управлении — это угол поворота рулевого колеса от положения, соответствующего началу поворота управляемых колес в одну сторону, до положения, соответствующего началу их поворота в противоположную сторону.
Суммарный люфт в рулевом управлении в регламентированных условиях испытаний не должен превышать предельных значений, установленных изготовителем в эксплуатационной документации, а при отсутствии таких данных не должен превышать:
- 10° для легковых автомобилей и созданных на их базе агрегатов грузовых автомобилей и автобусов
- 20° для автобусов
- 25° для грузовых автомобилей
Начало поворота управляемого колеса — это угол поворота управляемого колеса на (0,06 ± 0,01)°, измеряемый от положения прямолинейного движения.
При проверке суммарного люфта должны выдерживаться следующие предварительные условия:
- шины управляемых колес должны быть чистыми и сухими
- управляемые колеса должны находиться в нейтральном положении на сухой ровной горизонтальной асфальто- или цементо- бетонной поверхности
- испытания автомобилей, оборудованных усилителем рулевого привода, проводятся при работающем двигателе
Значение суммарного люфта в рулевом управлении определяют по углу поворота рулевого колеса между двумя зафиксированными положениями начала поворота управляемых колес в результате двух или более измерений.
Натяжение ремня привода насоса усилителя рулевого управления и уровень рабочей жидкости в бачке должны соответствовать требованиям, установленным изготовителем транспортного средства в эксплуатационной документации.
При органолептической проверке рулевого управления проверяется выполнение следующих нормативных требований:
- вращение рулевого колеса должно происходить без рывков и заеданий во всем диапазоне угла его поворота, неработоспособность усилителя рулевого управления (при его наличии на транспортном средстве) не допускается
- самопроизвольный поворот рулевого колеса от нейтрального положения при неподвижном состоянии транспортного средства с усилителем рулевого управления и работающем двигателе не допускается
- максимальный поворот рулевого колеса должен ограничиваться только устройствами, предусмотренными конструкцией транспортного средства
- не предусмотренные конструкцией перемещения деталей и узлов рулевого управления относительно друг друга или опорной поверхности не допускаются; резьбовые соединения должны быть затянуты и зафиксированы способом, предусмотренным изготовителем транспортного средства
- применение в рулевом механизме и рулевом приводе деталей со следами остаточной деформации, трещинами и другими дефектами не допускается
Повреждение и отсутствие деталей крепления рулевой колонки и картера рулевого механизма, а также не предусмотренное изготовителем транспортного средства в эксплуатационной документации повышение подвижности деталей рулевого привода относительно друг друга или кузова (рамы) не допускаются.
Не допускается подвижность рулевой колонки в плоскостях, проходящих через ее ось. Рулевая колонка должна надежно соединяться с сопрягаемыми деталями, не иметь повреждений. Устройство фиксации положения рулевой колонки с регулируемым положением рулевого колеса, а также устройство, предотвращающее несанкционированное использование транспортного средства, должны быть в работоспособном состоянии.
Осевое перемещение и качание плоскости рулевого колеса, качание рулевой колонки определяются путем приложения к рулевому колесу знакопеременных сил в направлении оси рулевого вала и в плоскости рулевого колеса перпендикулярно к колонке, а также знакопеременных моментов сил в двух взаимно перпендикулярных плоскостях, проходящих через ось рулевой колонки.
Взаимные перемещения деталей рулевого привода, крепление картера рулевого механизма и рычагов поворотных цапф определяются поворачиванием рулевого колеса относительно нейтрального положения на 40…60° в каждую сторону, а также приложением непосредственно к деталям рулевого привода знакопеременной силы.
ustroistvo-avtomobilya.ru
2.2 Требования предъявляемые к рулевому управлению
Основные требования в отношении конструкции и функционирования систем рулевого управления, которыми оснащаются транспортные средства, устанавливают Правила ЕЭК ООН №79. Главное требование, которое предъявляется к системе рулевого управления, заключается в наличии жесткого механического соединения между органом рулевого управления, как правило рулем, и ходовыми колесами в целях направления транспортного средства по заданной траектории. Это механическое соединение, при условии его проектирования с запасом прочности, должно исключать возможность поломки.
Механизмы рулевого управления могут состоять из: органа рулевого управления; рулевого привода; управляемых колес; в соответствующих случаях – из устройства энергопитания.
Система рулевого управления должна обеспечивать простое и надежное управление транспортным средством на всех скоростях до его максимальной конструктивной скорости. Она должна самостоятельно возвращаться в центральное положение при неповрежденном механизме рулевого управления.
При проектировании рулевого управления необходимо предусмотреть, чтобы при движении попрямой исключалась необходимость заметной корректировки водителем направления движения, а при движении с максимальной конструктивной скоростью транспортного средства отсутствовала вибрация системы рулевого управления.
Орган рулевого управления должен поворачиваться в том направлении, куда осуществляется поворот транспортного средства, и должна обеспечиваться постоянная взаимосвязь между направлением вращения рулевого колеса и углом поворота. Эти требования не применяются к системам, включающим функцию автоматического управления рулевой колонкой или функцию корректировочного рулевого управления.
Механизм рулевого управления должен быть сконструирован, изготовлен и установлен таким образом, чтобы при нормальных условиях эксплуатации транспортного средства или состава транспортных средств он выдерживал возникающие нагрузки. Ни одна из частей рулевого привода, если она специально не предназначена для этой цели, не должна ограничивать максимальный угол поворота.
На эффективность функционирования механизма рулевого управления, включая электрические управляющие магистрали, не должны влиять магнитные или электрические поля.
Современные системы содействия водителю в осуществлении рулевого управления должны быть сконструированы таким образом, чтобы водитель мог в любое время преднамеренно скорректировать эту функцию вручную.
Всякий раз, когда приводится в действие функция автоматического управления рулевой колонкой, водитель должен предупреждаться об этом сигналом, и функция контроля должна автоматически прерываться, если скорость транспортного средства более чем на 20% превышает установленный предел для данной функции или сигналы, подлежащие оценке, больше не поступают.
Всякое прекращение действия функции контроля должно в течение непродолжительного времени, но отчетливым образом доводиться до сведения водителя при помощи визуального сигнала и либо звукового сигнала, либо путем выведения сенсорного предупреждающего сигнала на орган рулевого управления.
Конструкция устройств регулирования геометрической схемы механизма управления должна обеспечивать после регулировки нормальное соединение регулируемых элементов посредством соответствующих устройств блокировки.
Рулевой привод, который может быть рассоединен при изменении геометрической формы транспортного средства (например, на раздвижных полуприцепах), должен оборудоваться устройствами блокировки для соответствующей перестановки элементов; если блокировка осуществляется автоматически, то для безопасности должно иметься дополнительное устройство ручной блокировки.
Управляемыми не должны быть только задние колеса. Это требование не относится к полуприцепам.
Для энергопитания механизма рулевого управления и других систем может использоваться один и тот же источник энергии.
При движении тягача автопоезда по прямой прицеп и буксирующее транспортное средство должны оставаться на одной линии. Если выравнивание не обеспечивается автоматически, то прицеп должен быть оснащен надлежащим устройством регулирования.
Управляемые колеса, органы управления рулевым механизмом и все механические части рулевого привода не должны выходить из строя, если они имеют надлежащие размеры, легко доступны для обслуживания. Если неисправность любой такой части может привести к потере управления транспортным средством, эта часть должна быть изготовлена из металла или из материала с эквивалентными свойствами и не должна подвергаться значительным деформациям при нормальных условиях работы системы рулевого управления.
В случае падения уровня аккумулированной энергии до предела, при котором может увеличиться рулевое усилие, водителю подается звуковой или оптический предупреждающий сигнал.
В случае остановки двигателя или выхода из строя одной из частей рулевого привода, не должно происходить резкого изменения угла поворота.
Любая неисправность, негативно влияющая на функции рулевого управления и не обусловленная механической поломкой, должна четко доводиться до сведения водителя транспортного средства. Дополнительным указанием на неисправность может служить заметная вибрация системы рулевого управления. Также в случае автомобиля сигналом о возникновении неисправности служит увеличение рулевого усилия; в случае прицепа допускается использование механического индикатора.
Механизм рулевого управления и схема его установки должны быть спроектированы таким образом, чтобы при необходимости его функционирование можно было проверить, не прибегая к демонтажу, с помощью общедоступных измерительных приборов, методов или испытательного оборудования.
studfile.net
Техническое обслуживание рулевого управления автомобиля
Требования, предъявляемые к рулевому управлению:
- обеспечение высокой маневренности автомобиля;
- минимальные затраты энергии на управление;
- минимальные обратные удары на рулевое колесо при движении на неровной дороге;
- отсутствие люфтов в приводе;
- стабилизация управляемых колес в направлении прямолинейного движения;
- правильная кинематика поворота управляемых колес, обеспечивающая чистое качение управляемых колес без бокового проскальзывания.
Требования Технического регламента о безопасности колесных транспортных средств (№ 720 от 9.2009 г.):
- Изменение усилия при повороте рулевого колеса должно быть плавным во всем диапазоне угла его поворота. Неработоспособность усилителя рулевого управления транспортного средства (при его наличии на транспортном средстве) не допускается.
- Самопроизвольный поворот рулевого колеса с усилителем рулевого управления от нейтрального положения при работающем двигателе не допускается.
- Суммарный люфт в рулевом управлении не должен превышать предельных значений, установленных изготовителем в эксплуатационной документации, или при отсутствии данных, установленных изготовителем, следующих предельных значений:
- транспортные средства категории M1 и созданные на базе их агрегатов транспортные средства категорий М2, N1 и N2 -10°;
- транспортные средства категорий М2 и М3 – 20°;
- транспортные средства категорий N – 25°.
- Повреждения и отсутствие деталей крепления рулевой колонки и картера рулевого механизма, а также повышение подвижности деталей рулевого привода относительно друг друга или кузова (рамы), не предусмотренное изготовителем транспортного средства (в эксплуатационной документации), не допускаются. Резьбовые соединения должны быть затянуты и зафиксированы способом, предусмотренным изготовителем транспортного средства. Люфт в соединениях рычагов поворотных цапф и шарнирах рулевых тяг не допускается. Устройство фиксации положения рулевой колонки с регулируемым положением рулевого колеса должно быть работоспособно.
- Применение в рулевом механизме и рулевом приводе деталей со следами остаточной деформации, с трещинами и другими дефектами не допускается.
- Уровень рабочей жидкости в резервуаре усилителя рулевого управления должен соответствовать требованиям, установленным изготовителем транспортного средства в эксплуатационной документации. Подтекание рабочей жидкости в гидросистеме усилителя не допускается.
Основные работы по техническому обслуживанию рулевого управления Техническое обслуживание механизмов рулевого управления носит плановый характер. Объем выполняемых работ определяется видом технического обслуживания.
Ежедневное техническое обслуживание (ЕО).
Необходимо проверять свободный ход рулевого колеса, состояние креплений сошки, а также ограничителей максимальных углов поворота управляемых колес. Кроме этого необходимо ежедневно проверять зазор в шарнирах гидроусилителя и в рулевых тягах, а также работу гидроусилителя и рулевого управления. Эти проверки выполняют при работающем двигателе.
Первое техническое обслуживание (ТО-1).
Провести контрольный осмотр и крепёжные работы. Проверить, не деформированы ли элементы рулевой колонки. Все крепёжные работы следует проводить обязательно по всем резьбовым соединениям, с усилением, соответствующим ТУ (корончатые гайки рулевых шарниров следует попытаться подтянуть гаечным ключом не расшплинтовывая их – если они стронутся с места, тогда их следует расшплинтовать и затянуть с соответствующим усилием).
После крепёжных работ следует проверить свободный ход рулевого колеса (люфт) с помощью люфтомеров-динамометров (рисунок 1).



Рисунок 1 – Измеритель суммарного люфта рулевого управления автомобилей (грузовых, легковых, автобусов и троллейбусов) ИСЛ-М по ГОСТ Р 51709-2001
Прибор предназначен для измерения суммарного угла поворота рулевого колеса до начала движения управляемых колес, а также суммарного угла поворота рулевого колеса при нормированном усилии на рулевом колесе. Принцип действия приборов основан на измерении угла поворота рулевого колеса АТС посредством преобразования импульсного сигнала оптико-механического датчика угла поворота в интервале срабатываний датчика движения управляемых колес при выборе люфта рулевого управления в обоих направлениях вращения руля, а также при превышении установленного порога сигнала от тензометрического датчика усилия. Конструктивно прибор выполнен в виде электронного блока, который крепится на руле АТС и выносного датчика движения управляемых колес. В электронном блоке прибора размещаются датчик усилия для поворота руля, оптико-мехаический преобразователь угла поворота, буквенно-цифровой индикатор и микропроцессорный преобразователь сигналов. Приборный блок крепится на рулевое колесо при помощи захвата.
Люфт в рулевых шарнирах у автомобилей категории М1 проверяются резким покачиванием в противоположные стороны смежных тяг. Люфт в маятниковом рычаге определяется покачиванием конца рычага в вертикальной плоскости.
При ТО-1 проверяют крепление и шплинтовку гаек рычагов поворотных цапф, гаек и шаровых пальцев продольной и поперечной рулевых тяг, состояние уплотнителей шаровых пальцев, устраняют обнаруженные неисправности. Проверяют крепление и при необходимости закрепляют сошку механизма рулевого управления на валу, картер рулевого механизма на раме и контргайку регулировочного винта вала рулевой сошки. Проверяют зазор и величину усилия поворота рулевого колеса с помощью динамометра, зазор в шарнирах привода рулевого механизма.
Зазоры в шарнирных соединениях рулевых тяг проверяют резким покачиванием рулевого колеса в обе стороны. Значительное перемещение при этом продольной рулевой тяги относительно пальцев указывает на необходимость устранения зазора в шарнирных соединениях тяг. Для этого следует расшплинтовать регулировочную пробку в торце тяги, завернуть пробку специальной лопаткой до отказа и отвернуть так, чтобы прорезь в пробке совпала с отверстием для шплинта, после чего зашплинтовать. Таким же образом устраняют зазор и в другом шарнирном соединении тяги.
Второе техническое обслуживание (ТО-2).
В процессе ТО-2 выполняют те же работы, что и при ТО-1, а также проверяют углы установки передних колес и при необходимости выполняют их регулировку; проверяют и при необходимости подтягивают крепление клиньев шкворней, картера рулевого механизма, рулевой колонки рулевого колеса; зазоры рулевого управления, шарниров рулевых тяг и шкворневых соединений; состояние и крепление карданного вала рулевого управления; крепление и герметичность узлов и деталей гидроусилителя рулевого управления.
Регулировка механизма рулевого управления с усилителем зависит от конструкции автомобиля. Все подвижные сопрягаемые детали должны работать без заедания и заклинивания при повороте вала рулевой сошки от одного крайнего положения до другого. Работу усилителя проверяют на специальном стенде или непосредственно на автомобиле при нахождении сошки в крайнем положении [20].
При ТО-2, в порядке сопутствующего ремонта, можно заменять отдельные неисправные легкодоступные детали и целиком узлы рулевого механизма. При необходимости разъединения рулевых тяг путём выпрессовки шаровых пальцев из конических отверстий смежных тяг следует пользоваться специальными съёмниками.
Сезонное техническое обслуживание (СО).
При сезонном техническом обслуживании выполняют работы ТО-2, а также осуществляют сезонную замену смазочного материала. Визуальный контроль технического состояния деталей, агрегатов и механизмов рулевого управления выполняют путем осмотра и опробования. Если доступ к деталям рулевого управления невозможен сверху, то осмотр следует проводить на подъемнике, в осмотровой канаве или на эстакаде. Контроль крепления колонки и рулевого механизма осуществляется путем приложения усилий во всех направлениях. В процессе такой проверки не допускается осевое перемещение или качение рулевого колеса, колодки, а также присутствие стука в узлах рулевого управления.
При проверке креплений картера рулевого механизма, а также рычагов поворотных цапф необходимо поворачивать рулевое колесо около нейтрального положения на 40-50° в каждую сторону. Состояние рулевого привода, а также надежность крепления соединений проверяют при помощи приложения знакопеременной нагрузки непосредственно к деталям привода. Работа ограничителей поворота проверяется визуально при повороте управляемых колес в разные стороны до упора. Для того чтобы проверить герметичность соединений системы гидроусилителя рулевого привода, необходимо удерживать рулевое колесо в крайних положениях при работающем двигателе. Кроме этого, проверку герметичности соединений системы гидроусилителя осуществляют в свободном положении рулевого колеса.
Соединения считаются герметичными, если отсутствует протекание смазочного материала. Кроме этого, при проверке не допускается самопроизвольный поворот рулевого колеса с гидроусилителем рулевого привода от нейтрального положения к крайним или наоборот. Силу трения, а также свободный ход рулевого колеса проверяют при помощи специального прибора, который состоит из динамометра и люфтомера (рисунок 1).
Перед проверкой механизма рулевого управления доводят до нормы давление воздуха в шинах, проверяют и регулируют по необходимости углы установки и подшипники ступиц управляемых колес. Подтягивают все узлы крепления, автомобиль устанавливают на ровную площадку, а управляемые колеса – в положение для движения прямо.
Люфт в шарнирах проявляется во взаимном относительном перемещении соединяемых деталей. Проверку усилителя рулевого управления осуществляют путем измерения давления в системе гидроусилителя. Для проверки необходимо вставить в нагнетательную магистраль манометр с краном. Замеры давления производят при работающем двигателе на малых оборотах, поворачивая колеса в крайние положения. Давление, которое развивает насос гидравлического усилителя, должно быть не менее 6 МПа. Если давление меньше 6 МПа, то необходимо закрыть кран, после этого давление должно подняться до 6,5 МПа. Если после закрытия крана давление не поднимается, значит, произошла поломка насоса, который необходимо отремонтировать или заменить на новый.
Регулировочные работы по рулевому механизму включают в себя работы по регулировке осевого зазора в зацеплении, а также в подшипниках вала винта. Рулевой механизм считается исправным и пригодным для дальнейшего применения, если люфт рулевого колеса при движении по прямой не превышает 10°. Если люфт превышает допустимые значения, то необходимо проверить зазор в подшипниках вала винта. Если в подшипниках имеется достаточно большой зазор, то осевой люфт будет легко ощущаться. Для того чтобы устранить люфт в подшипниках вала, необходимо отвернуть болты, снять крышку картера рулевого механизма и затем удалить одну регулировочную прокладку. После удаления прокладки необходимо снова выполнить проверку осевого люфта. Операцию необходимо повторять до тех пор, пока усилие на поворот руля не будет составлять 3-6 Н. Регулировку зацепления винта (червяка) с роликом регулируют без снятия рулевого механизма. Для этого необходимо отвернуть гайку со штифта вала винта, затем снять шайбу со штифта, после этого при помощи специального ключа поворачивают регулировочный винт на несколько вырезов в стопорной шайбе. В результате этого происходит изменение величины бокового зазора в зацеплении, что, в свою очередь, изменяет свободный ход рулевого колеса. Для того чтобы определить величину люфта в сочленениях рулевого привода, необходимо резко покачивать сошку руля при повороте рулевого колеса. После проверки при необходимости подтягивают резьбовую пробку. Кроме этого при проверке осевого люфта в сочленения добавляют смазку, а при большом износе производят замену шарового пальца или всей тяги в сборе. К основным неисправностям системы управления относятся: обломы и трещины на фланце крепления картера, износ отверстия в картере под втулку вала рулевой сошки и деталей шаровых соединений рулевых тяг; износ червяка и ролика вала сошки втулок, подшипников и мест их посадки; изгиб тяг и ослабление крепления рулевого колеса на валу. При значительном износе рабочей поверхности или при отслоении закаленного слоя червяк рулевого колеса заменяют на новый. При наличии трещин на поверхности ролика вала его меняют на новый. Червяк и ролик необходимо заменять одновременно.
Изношенные шаровые пальцы, которые имеют сколы или задиры, необходимо заменить на новые. Одновременно с заменой шаровых пальцев осуществляется замена их вкладышей. Сломанные или ослабленные пружины не подлежат восстановлению и заменяются на новые. Нарушение изгиба тяг устраняется правкой тяги в холодном состоянии. Основными неисправностями гидравлического усилителя являются отсутствие усиления при любых частотах вращения коленчатого вала двигателя, а также неравномерное или недостаточное усиление при повороте рулевого колеса в обе стороны. Для того чтобы устранить неисправности системы гидравлического усиления, необходимо слить из системы масло, тщательно промыть составляющие ее детали, а также разобрать насос. Последовательность разборки насоса гидравлического усиления следующая:
- снять крышку бачка и фильтра;
- удерживая предохранительный клапан от выпадения, необходимо снять бачок с корпуса насоса;
- снять распределительный диск;
- снять статор, предварительно отметив его положение относительно распределительного диска и корпуса насоса;
- снять ротор в сборе с лопастями.
Кроме этого при ремонте насоса гидравлического усиления необходимо снять шкив, стопорное кольцо и вал насоса с передним подшипником. Детали насоса необходимо промыть раствором, обмыть водой и затем обдуть сжатым воздухом. При техническом обслуживании необходимо проверять свободное перемещение перепускного клапана в крышке насоса, а также отсутствие задиров или износа на торцевых поверхностях ротора, корпуса и распределительного вала. После проверки, устранения неполадок и сборки насос необходимо проверить на стенде. Рулевой механизм после проверки, ремонта и контроля деталей собирают, регулируют и испытывают с гидравлическим усилителем в сборе. Кроме этого из-за неполадок в системе рулевого управления может возникать стук в процессе движения, неустойчивое движение автомобиля, а также тяжелый поворот рулевого колеса. В том случае, если рулевое колесо туго вращается, необходимо проверить давление в шинах передних колес. Другой причиной туго вращающегося рулевого колеса может быть деформация деталей рулевого привода. В этом случае следует проверить, не согнуты ли рулевые тяги и поворотные рычаги, и заменить деформированные детали. При тугом повороте рулевого колеса также следует проверить уровень масла в картере рулевого механизма и при необходимости долить его до нормы. Если при проверке обнаруживается неисправный сальник, его необходимо заменить на новый. Кроме этого в некоторых случаях причиной тугого вращения рулевого колеса на морозе является загустевание трансмиссионного масла.
При проверке давления в магистрали рулевого управления с гидроусилителем между насосом 2 (рисунок 2) и шлангом 6 высокого давления устанавливают тройник с манометром 4 и вентилем 5. При работающем двигателе на частоте вращения холостого хода передние колеса поворачивают до упора и открывают вентиль 5, наблюдая за давлением масла, которое должно быть не менее 6,5 МПа. Меньшее давление свидетельствует о неисправностях в насосе или распределителе гидроусилителя. Если при закрытом вентиле давление будет повышаться, это укажет на неисправности в распределителе, если будет снижаться – на неисправности в насосе. Если при закрытом вентиле давление хотя и повышается, но остается меньше 6,0 МПа, то это указывает на неисправности обоих узлов.
Для регулирования затяжки шарнирных соединений рулевых тяг, за исключением саморегулирующихся конструкций, предварительно расшплинтовывают резьбовые пробки в наконечниках тяг и поворачивают их до отказа, а затем отворачивают на 0,5 оборота до совпадения прорезей для шплинта. При этом устанавливается нужный зазор между сухарем и ограничителем пружины шарнира.
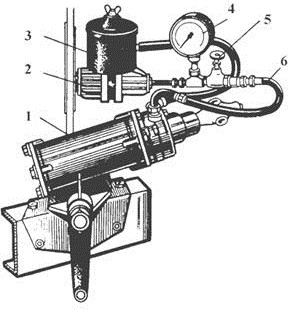
1 – гидроусилитель; 2,3 – насос и его бачок; 4, 5 – манометр и вентиль тройника; 6 – шланг высокого давления
Рисунок 2 – Прибор для проверки гидроусилителей
Необходимо проверить шаровые шарниры рулевых тяг, перемещая наконечники тяг вдоль оси пальцев. Для проверки при помощи рычага и опоры перемещают наконечник параллельно оси пальцев. Если вкладыш пальца не заклинило в гнезде наконечника тяги, от осевое перемещение наконечника относительно пальца составляет 1…1,5 мм, если вкладыш заклинило, то его необходимо заменить вместе с вкладышем. Кроме того, рулевое колесо может туго вращаться после ремонта маятникового рычага. Это может возникнуть из-за перетянутой регулировочной гайки при замене втулок или оси маятникового рычага. Если гайка затянута неправильно, то маятниковый рычаг будет вращаться в горизонтальном положении под действием собственной массы. Если гайка затянута правильно, то рычаг будет поворачиваться только под действием силы, приложенной к его концу. В том случае, если гайка перетянута, то необходимо ее отвернуть, затем приподнять шайбу и снова затянуть гайку.
После того как натяжение гайки исправлено, нужно соединить шаровые пальцы тяг с рычагом. Если в рулевом механизме нет неполадок, то проблема заключается в установке углов передних колес. Установку передних колес необходимо проверять после ремонта или замены деталей передней подвески, а также после поездки по неровной дороге. Однако необходимо учитывать, что точную регулировку углов передних колес могут произвести только на специальных стендах (см. раздел ТО шин). Стуки передней подвески во время движения, колебания передних колес, затрудненное управление автомобилем могут появиться в результате увеличения зазоров в соединении деталей рулевого управления из-за износа деталей, ослабления затяжки гаек крепления Наконечников или шаровых пальцев. Для того чтобы устранить зазоры, необходимо подтянуть гайки шаровых пальцев рулевых тяг, регулировочную гайку оси маятникового рычага, гайки шаровых пальцев поворотных рычагов, а также болты крепления рулевого механизма, кронштейна маятникового рычага. Кроме этого для устранения шума нужно отрегулировать зацепление ролика с червяком или подшипников червяка. При резком ухудшении устойчивости автомобиля необходимо остановиться и проверить крепления картера рулевого управления, кронштейна маятникового рычага, кронштейна вала рулевой колонки к кузову, а также затяжку гаек крепления шаровых пальцев.
Если в процессе движения руль автомобиля «тянет» в сторону, то проблема, скорее всего, в падении давления в одном из передних колес, поэтому автомобиль отклоняется в его сторону. При падении давления в одном из задних колес автомобиль даже на небольшой скорости начинает водить то в одну сторону, то в другую. Если автомобиль постоянно отклоняется в одну сторону, то причиной этого может быть деформация поворотной цапфы или поворотного рычага из-за быстрого движения по неровной дороге. При этом происходит постоянный занос автомобиля. Если эти детали деформированы настолько, что их невозможно восстановить, то эти детали необходимо заменить на новые.
При наличие люфтов в рулевых шарнирах запрещена эксплуатация автомобилей. Исключение составляют шарниры продольных рулевых тяг (грузовых автомобилей). При обнаружении в них повышенного люфта (зазора), его следует устранить наворачиванием (до упора, а затем отпустить на ¼ оборота) регулировочных пробок Г-образным ключом, с последующей шплинтовкой (рисунок 3).

1-пробка; 2-вкладыш; 3-шаровой палец; 4-пружина; 5-упорная втулка; 6- продольная тяга; 7-гайка
Рисунок 3 – Проверка (а) и регулировка (б) люфта в сочленениях рулевого привода, (в)-шарнир продольной рулевой тяги
Просмотров: 3 135
extxe.com
Рулевое управление: устройство, принцип работы, виды
Первые автомобили, в частности, автомобиль Карла Бенца, который считается первым в мире серийным авто, были трехколесными. Почему? Да просто конструкторы не могли придумать, как заставить оба передних колеса синхронно поворачивать в одну сторону. Поэтому переднее колесо было одно, а вместо привычной сегодня «баранки» стоял рычаг.
Но такое положение вещей не продлилось долго. Следующие «самоходные телеги» уже имели 4 колеса и худо-бедно справлялись с маневрами. Так начало развиваться рулевое управление, назначение которого не изменилось за все годы существования автомобиля.
Устройство и принцип работы типичного рулевого управления
На абсолютном большинстве автомобилей рулевое управление реализовано по одинаковому принципу. Конечно, есть отличия (например, тип усилителя руля), но тип общей компоновки не меняется.
Устройство рулевого управления- Руль стоит первым в цепочке управления автомобилем. Это не только способ передать сигнал системе управления, в какую сторону и как резко поворачивать, но и способ обратной связи, а также элемент пассивной безопасности автомобиля (в рулевое колесо встраивается подушка).
- Рулевая колонка – промежуточный элемент между самим рулем и механизмом поворота. На рулевую колонку может крепиться система безопасности, замок зажигания, рычаги включения дворников и поворотников.
- Следующий на очереди – рулевой механизм, с помощью которого поворот руля (а следовательно, и рулевой колонки) преобразовывается в команду на поворот для рулевых тяг.
- После того, как рулевой механизм передал усилие на рулевую рейку, в действие приходят рулевые тяги с наконечниками и рычагами. Они соединены с поворотными кулаками передних колес и заставляют их поворачивать в нужном направлении на нужный угол.
- Чтобы с вождением автомобиля справился любой человек, применяется гидравлический или электрический усилитель руля.
Классификация рулевого управления
Принципиальных отличий между разными типами рулевого управления нет, но часто его классифицируют по типу редуктора рулевого механизма:
Тип редуктора «шестерня-рейка».
Устройство рулевого управления с редуктором типа «шестерня-рейка» 1 — руль; 2 — рулевой вал с шестерней; 3 — рейка; 4 — рулевые тяги; 5 — поворотные рычаги; 6 — колеса.Это самая распространенная разновидность рулевого редуктора, которая за годы использования показала свою надежность.
Принцип действия очень простой: на рулевом валу (который отходит от рулевой колонки) закреплена продолговатая шестерня. Рулевая рейка имеет зубчатый участок, который входит в зацепление с этой шестерней. При вращении руля шестерня вращается на месте и толкает зубчатую рейку в одну или другую сторону. Соответственно приходят в действие и рулевые тяги.
Передаточное число на рейке может быть неизменным, а может меняться ближе к краям. Получить такой эффект просто: нужно изменить наклон зубьев на рейке. Благодаря этому для поворота на большой угол не нужно «крутить баранку» до посинения, количество оборотов руля для маневра сокращается.
Тип редуктора «червяк-ролик».
Устройство рулевого управления с редуктором типа «червяк-ролик»: 1 — руль; 2 — рулевой вал с червяком; 3 — ролик с валом сошки; 4 — рулевая сошка; 5 — средняя тяга; 6 — боковые тяги; 7 — поворотные рычаги; 8 — колеса; 9 — маятниковый рычаг; 10 — шарниры рулевых тяг.Этот тип редуктора можно назвать устаревшим, поскольку его давно перестали устанавливать на автомобили. Тем не менее, он еще встречается на старых машинах.
В основе заложена червячная передача, в которой червяк закреплен на дополнительном валу рулевой колонки. При повороте руля вращается червяк и приводит в движение ролик, стоящий с ним в зацеплении.
Сдвигаясь по нарезке червяка, ролик заставляет вращаться вал, на который он установлен и к которому присоединен рычаг рулевой сошки. Вал вращается, рулевая сошка описывает полукруг, приводит в действие остальные элементы рулевого привода (среднюю тягу, маятниковый рычаг, боковую тягу, поворотные кулаки колес).
Винтовой тип редуктора.
Устройство редуктора рулевого управления винтового типаПо принципу действия он очень похож на червячный редуктор. Однако на дополнительном валу рулевой колонки установлен не червяк, а винт. Он входит в зацепление с гайкой, на наружную сторону которой нанесен зубчатый обод. Когда вращается винт, гайка поворачивается в одну или другую сторону и поворачивает рулевую сошку, а она уже направляет остальные компоненты рулевого привода.
В усовершенствованных моделях на винт ставится шариковая шайба, которая служит промежуточным элементом между ним и гайкой. При вращении винта шарики сдвигают шайбу, а она поворачивает гайку.
Когда на легковые автомобили начали массово устанавливать гидроусилитель руля (ГУР), червячный редуктор вышел из обихода – к нему ГУР не поставишь. На его место пришел реечный привод, а винтовой «перекочевал» на тяжелые автомобили.
Кроме редуктора, в рулевом механизме могут отличаться типы передачи усилия на управляемые колёса. Более простой считается конструкция с реечным редуктором: от рулевой рейки отходят две рулевые тяги, которые крепятся к поворотным кулакам колес. Для того, чтобы соединение было подвижным, но без люфтов, используются шаровые наконечники.
На редуктор с червячной или винтовой передачей подходит другой тип рулевого механизма. Его называют рулевой трапецией и состоит он из довольно сложной системы рычагов. Сложность конструкции оправдывается большей мощностью, так что рулевая трапеция с винтовым редуктором ставится на грузовые автомобили, в то время как рулевая рейка лучше подходит для легковых.
И, наконец, систему рулевого управления классифицируют по типу усилителя: ГУР, ЭГУР и ЭУР.
- ГУР – гидравлический усилитель, классический тип. Он и сегодня ставится на автомобили, но постепенно уступает дорогу более современным видам усилителя;
- ЭГУР – электрогидравлический усилитель руля. В нём электромотор выполняет вспомогательную функцию, в то время как основная работа выполняется гидравликой;
- ЭУР – электроусилитель, современный способ управлять автомобилем. Электромотор умножает усилие, которое водитель прикладывает к рулю, то есть работает без каких-либо гидравлических элементов.
Основные неисправности рулевого управления
Конструкторы делают элементы рулевого управления из надежных износостойких материалов. Однако любая деталь имеет свой ресурс и свой запас прочности, так что рано или поздно в рулевом управлении начинают появляться неисправности и дефекты. Они достаточно типичные для большинства автомобилей.
- Износ шарниров рулевых тяг. По сути, любой шарнир в рулевом управлении – слабое место, особенно это касается конструкции рулевой трапеции. Однако рулевые тяги постоянно страдают от нагрузок, ударов и агрессивного вождения, и их шарниры выходят из строя чаще всего. Как только шарнирное соединение выходит из строя, оно дает о себе знать стуком во время выполнения поворота или просто езды по неровной дороге.
- Износ рулевых наконечников. Совершенно стандартная ситуация, поскольку рулевые наконечники считаются расходниками, особенно на наших дорогах. Шаровые шарниры защищены пыльниками и смазкой, но со временем вода попадает под пыльник, шарнир изнашивается и начинает люфтить. Водитель чувствует проблему как увеличение свободного хода руля и ухудшение управляемости. При появлении таких симптомов нужно поскорей принять меры. Замена рулевых наконечников – стандартная процедура, которую выполнят на любом СТО.
- Износ подшипника рулевой колонки. Такая поломка происходит редко, но требует срочных мер по устранению. Если подшипник изнашивается, рулевой вал начинает шататься, а водитель чувствует это как «биение руля». Лучше сразу обратиться в сервис, чем ставить на своей машине интересные опыты.
- Нарушение настроек колес. Неотбалансированные колёса будут ощущаться водителем как пульсация рулевого колеса при движении. Это не только доставляет дискомфорт, но и влияет на срок службы самих колес и смежных элементов.
Основные требования к рулевому управлению
Существуют стандартные требования, которые предъявляются к системе рулевого управления. Если система этим требованиям соответствует, ее можно считать исправной.
- Угол свободного хода руля. Это тот угол поворота, который делается «вхолостую», до начала поворота колес. В норме для легковых автомобилей он должен быть не боле 10 градусов, и если свободный ход постепенно увеличивается, это говорит о необходимости регулировки или ремонта.
- Система должна правильно «рулить»! То есть, нормально держать автомобиль при езде по прямой, точно выполнять маневры, не отклоняться от заданной траектории.
- Руль должен легко поворачиваться во время выполнения маневров. Усилители для того и придумали, чтобы на дороге водитель думал о дороге, а не о том, хватит ли ему сил на следующий поворот. Если управление тугое, требует значительных усилий, проблему нужно найти и решить.
- Строго выверенное число полных оборотов руля от среднего до крайнего положения. Для выполнения поворота водитель не должен выкручивать руль до бесконечности.
- Система должна работать даже после того, как отключится усилитель руля. В дороге может случиться всё, что угодно, в том числе утечка гидравлической жидкости или отказ электродвигателя в ЭУР. При этом автомобиль должен сохранить управляемость. Да, усилий это потребует больше, но и остановка будет там, где захочет водитель.
Принципиальные отличия между «левым» и «правым» рулем
В отношении праворульных автомобилей до сих пор ведутся споры. Сторонники утверждают, что те машины, которые делались японскими или английскими инженерами «как для себя», выше по качеству, чем аналогичные модели, но выпущенные на экспорт. Сложно сказать, действительно ли это так, но факт остается фактом: есть отдельная категория автолюбителей, которые предпочитают только машины с правым рулем.
Основное отличие рулевого управления автомобилей с правым рулем – зеркальное расположение элементов. Например, размещение редуктора на рулевой рейке. И сам редуктор рассчитан на другую сторону подключения.
А можно ли переделать праворульную машину на леворульную? Купить автомобиль с правым рулем и затем перенести руль влево можно, и есть даже СТО, которые специализируются на таких услугах. Но цена такого тюнинга немаленькая, поскольку «перекраивать» придется много. Это не просто руль на другой стороне, отличается очень многое, от зеркал до головного света.
Заключение
Рулевое управление – система достаточно живучая. Если не считать регулярную замену расходников, моно проездить на своей машине долгие годы и ни разу его не ремонтировать. Однако если случается проблема или просто какие-то странные постукивания-пошатывания не дают покоя, лучше не затягивать с визитом на СТО. В системе рулевого управления все элементы взаимосвязаны, и поломка одного ведет к поломке другого. Грамотная диагностика и своевременный ремонт уберегут от проблем и лишних расходов.
vaznetaz.ru
Рулевое управление автомобиля | Автомобильный справочник
Рулевое управление автомобиля, это система управления направлением движения с помощью рулевого колеса. Рулевое управление представляет собой совокупность узлов и механизмов, предназначенных для синхронизации положения рулевого колеса и угла поворота управляемых колес. Вот о том, из каких узлов состоит современное рулевое управление автомобиля, мы и поговорим в этой статье.
Содержание
Классификация системы рулевого управления
Системы рулевого управления можно классифицировать следующим образом:
Мускульная система рулевого управления
Необходимые усилия рулевого управления генерируются исключительно мускульной энергией водителя. Эти системы рулевого управления в настоящее время используются в самых маленьких легковых автомобилях.
Система рулевого управления с усилителем
Усилия рулевого управления генерируются мускульной энергией водителя и вспомогательной силой, реализуемой гидравлически и в последнее время все чаще электрически. Эта система рулевого управления в настоящее время используется в легковых и грузовых автомобилях.
Система автоматизированного рулевого управления
Усилия рулевого управления генерируются исключительно не мускульной (внешней) энергией (например, в машинах).
Фрикционная система рулевого управления
Усилия рулевого управления создаются силами, воздействующими на контактное пятно шины. Примером такой системы могут служить поддерживающие мосты в грузовиках. Передача рулевых и вспомогательных сил происходит механически, гидравлически или электрически либо сочетаниями этих трех компонентов.
Требования к системе рулевого управления
Система рулевого управления преобразует создаваемые водителем вращательные движения рулевого колеса в изменение угла поворота управляемых колес автомобиля. Конструкция и схема системы призваны обеспечить удобное и безопасное рулевое управление автомобиля во всех ситуациях и на всех скоростях. Вся система рулевого управления, от рулевого колеса и до управляемых колес, должна в этих целях обладать следующими свойствами.
Передача инициируемых водителем рулящих движений на рулевом колесе без люфта особенно важна при движении по прямой. Это гарантирует безопасное, неутомительное для водителя управление автомобилем, прежде всего на средних и высоких скоростях.
Поэтому рулевой механизм должен быть очень жестким. Это необходимо для обеспечения точной управляемости и преодоления отклонения от заданного угла поворота рулевого колеса под действием изменяющихся возвратных сил, возникающих, например, при изменении бокового ускорения.
Слабое трение в рулевом механизме позволяет водителю получать через реактивные силы тактильную обратную связь, дающую информацию о коэффициенте сцепления между дорогой и шинами. Слабое трение также помогает колесам выровняться для движения по прямой. В системах рулевого управления с мускульной энергией слабое трение обеспечивает небольшие движущие силы. В системах рулевого управления с усилителем оно повышает эффективность управления.
Кинематические параметры рулевого управления и конструкция управляемой оси автомобиля должны быть такими, чтобы водитель мог чувствовать величину сцепления между шинами и дорогой.
Требования к рулевому управлению
Требованиями к функционированию системы рулевого управления являются:
Легкое, безопасное рулевое управление автомобилем. Сюда, к примеру, относится тенденция рулевого управления автоматически возвращаться в положение прямолинейного движения при отпускании руля.
Максимально возможное демпфирование колебаний, передаваемых от колес автомобиля на рулевое колесо при движении по неровным дорогам. Но этот процесс не должен приводить к потере обратной связи в рулевом управлении.
Для обеспечения чистого качения колес и, соответственно, предотвращения их избыточного износа вся рулевая кинематика должна удовлетворять условию Аккермана. Это означает, что оси управляемых колес должны пересекаться в одной точке с осью задних колес (рис. «Условие Аккермана» ).
Достаточно жесткая схема всех компонентов рулевого механизма означает, что даже малые инициируемые водителем рулевые движения преобразуются в изменение направления управляемых колес, обеспечивая безопасную и точную управляемость автомобиля.
Угол поворота рулевого колеса от упора до упора по соображениям комфорта должен быть как можно меньше при парковке и движении с небольшой скоростью. Однако на средних и высоких скоростях рулевое управление не должно быть столь чувствительным.
Требования законодательства, предъявляемые к системам рулевого управления автомобилей
Требования законодательства, предъявляемые к системам рулевого управления автомобилей, описаны в международных правилах ECE-R79. К этим требованиям, наряду с базовыми функциональными требованиями, относятся максимально допустимые управляющие силы для исправной и неисправной систем рулевого управления. Эти требования регламентируют прежде всего поведение автомобиля и рулевого управления при въезде на круг и выезде с круга. Для автомобилей всех категорий: после отпускания рулевого колеса при движении автомобиля по окружности на скорости 10 км/ч, радиус поворота автомобиля должен увеличиться или как минимум остаться тем же.
Для автомобилей категории М1 (легковые автомобили с числом посадочных мест до 8): когда автомобиль в тангенциальном направлении выезжает из круга с радиусом 50 м на скорости 50 км/ч, в системе рулевого управления не должно возникать никаких необычных вибраций. В автомобилях категорий М2, М3, N1, N2 и N3 это поведение должно демонстрироваться на скорости 40 км/ч или, если это значение не достигается, то на максимальной скорости.
Это поведение также предписывается в случае неисправности у автомобилей с гидро- или электроусилителем рулевого управления. У автомобилей категории М1 это должно быть возможно в случае отказа сервопривода рулевого управления для въезда со скоростью 10 км/ч в течение 4 секунд в круг радиусом 20 м. Управляющее усилие на рулевом колесе не должно превышать 30 даН (табл. «Нормы рабочих усилий в системе рулевого управления» ).
Типы рулевых механизмов автомобиля
Требования к системе рулевого управления дали развитие прежде всего двум фундаментальным типам рулевых механизмов. Оба типа можно использовать в системах с чисто мускульной энергией или (в сочетании с соответствующими сервосистемами) в системах с усилителем рулевого управления.
Реечный рулевой механизм
В принципе, как следует из названия, реечный рулевой механизм состоит из шестерни и зубчатой рейки (рис. «Реечный рулевой механизм» ). Передаточное отношение механизма определяется отношением числа оборотов шестерни, равного числу оборотов рулевого колеса, к перемещению рейки.
В качестве альтернативы постоянному передаточному числу рейки на рейке за счет соответствующей нарезке зубьев имеется возможность изменять это число в зависимости от длины хода. Таким образом, устойчивость при движении автомобиля по прямой можно улучшить посредством непрямого передаточного числа вокруг центра рулевого управления. В то же время, это возможно с реализацией прямого передаточного числа в диапазоне средних и больших углов поворота (например, при парковке) для уменьшения необходимого угла поворота при повороте рулевого колеса от упора до упора.
Рулевой механизм типа «винт-шариковая гайка-сектор»
Усилия, возникающие между винтом и гайкой рулевой передачи, передаются через ряд рециркулирующих шариков, снижающих трение (рис. «Рулевой механизм с шариковой гайкой» ). Гайка воздействует на вал сошки через зубчатый сектор. Этот рулевой механизм также позволяет получать переменное передаточное отношение.
Повышение эффективности рулевого управления с зубчатой рейкой означает, что рулевой механизм с шариковой гайкой практически больше не используется в легковых автомобилях.
Рулевое управление с усилителем для легковых автомобилей
Увеличение размеров и массы автомобилей и повышение требований к комфорту и безопасности в последние годы привело к тому, что рулевое управление с усилителем появилось на всех категориях легковых автомобилей, вплоть до компактных. Эти системы, за редким исключением, устанавливаются в базовой комплектации. Усилия водителя по рулению поддерживаются гидравлической или электрической сервосистемой. Эта сервосистема должна быть такой, чтобы водитель постоянно получал четкую обратную связь о сцеплении шин с дорогой, и чтобы эффективно гасились негативные воздействия, вызываемые неровностями дороги.
Системы рулевого управления с гидравлическим усилителем
Сочетание механической конструкции рулевого механизма с гидравлической сервосистемой привело к созданию реечного рулевого механизма с усилителем (рис. «Схема системы рулевого управления с усилителем» ) и рулевой механизм с шариковой гайкой с усилителем.
Распределительный клапан рулевой системы
Служит для нагнетания в силовой цилиндр гидравлической жидкости под таким давлением, которое соответствует углу поворота рулевого колеса (рис. «Принцип действия управляющего клапана рулевого управления с гидроусилителем» ). Упругий датчик крутящего момента, обычно торсион («Схема системы рулевого управления с усилителем» ) обеспечивает преобразование момента на рулевом колесе при отсутствии люфта в пропорциональное этому моменту прецизионное управляющее перемещение золотника. Перемещение золотника вызывается поворотным скольжением относительно управляющей втулки. Каналы золотника, которые выполнены в форме паза, в результате управляющего перемещения образуют отверстия соответствующего поперечного сечения для пропуска жидкости.
Распределительные клапаны обычно работают в соответствии с так называемым принципом «открытого центра», т.е. когда распределительный клапан не действует, жидкость, подаваемая насосом, перепускается обратно в бачок при нулевом давлении.
Характеристики рулевого управления с усилителем
Растущие требования к удобству и безопасности привели к появлению управляемых систем рулевого управления с усилителем. Одним из примеров является управляемая электроникой реечная система рулевого управления с усилителем (рис. «Схема управления системы рулевого управления с гидроусилителем» ). В зависимости от скорости движения автомобиля, замеряемой посредством электронного спидометра, изменяется сила, воздействующая на рулевое управление (рис. «Характеристические кривые системы рулевого управления с усилителем» ). ЭБУ анализирует скорость и определяет уровень гидравлической обратной связи и, соответственно, необходимое рабочее усилие на рулевом колесе. Этот уровень гидравлической реакции передается на распределительный клапан системы рулевого управления через электрогидравлический конвертер, который модифицирует гидравлическую реакцию относительно скорости автомобиля.
Определенные характеристики усилителя рулевого управления позволяют поворачивать рулевое колесо с минимальным усилием при стоящем автомобиле или вовремя его движения с небольшой скоростью. Степень усиления снижается с повышением скорости движения. Таким образом, при движении с высокими скоростями обеспечивается возможность управления поворотами автомобиля в оптимальном режиме.
При такой системе важно, что давление и расход гидравлической жидкости никогда не снижаются и поэтому эти параметры могут быть немедленно востребованы в критических ситуациях управления.
Рабочий цилиндр рулевой системы
Силовой цилиндр двойного действия преобразует давление гидравлической жидкости во вспомогательное усилие, воздействующее на рейку и усиливающее воздействие водителя на рулевое колесо. Этот цилиндр обычно размещается внутри картера рулевого механизма и характеризуется низким трением. Поскольку цилиндр должен иметь крайне низкое трение, то особо высокие требования предъявляются к поршню и уплотнениям штока.
Подача жидкости гидроусилителя руля
Подача жидкости осуществляется насосом (обычно приводимым от двигателя автомобиля), который соединен с бачком посредством шлангов и трубок. Насос должен быть рассчитан на нагнетание необходимого давления и объема гидравлической жидкости для выполнения парковки даже на холостых оборотах двигателя.
Для защиты от перегрузок в системе рулевого управления требуется клапан ограничения давления. Этот клапан обычно встраивается в насос. Конструкция насоса должна обеспечивать такой режим работы, чтобы рабочая температура гидравлической жидкости не поднималась выше предельного уровня, отсутствовал шум при работе насоса и не образовывалась пена в используемой жидкости.
Насос для усиления рулевого управления может также иметь привод от электродвигателя. Здесь обычно используется шестеренчатый или роторный насос. Из-за ограниченной мощности электрической системы автомобиля эти системы используются в основном в автомобилях классов А и В. Поскольку необходимость в ременном приводе от ДВС отпадает, то насос можно устанавливать произвольно, что благоприятствует модульной конструкции автомобиля. Управляющая электроника и анализ сигналов, например, скорости автомобиля и скорости руления, позволяют адаптировать частоту вращения вала насоса к текущему энергопотреблению рулевого управления и ситуации на дороге в целях экономии энергии.
Системы рулевого управления с электроусилителем
Системы рулевого управления с электромеханическим усилителем также используются в легковых автомобилях среднего и малого классов. Такие системы имеют электродвигатель, работающий от бортовой сети. Механическое соединение электродвигателя и рулевого механизма может быть реализовано в виде рулевой колонки и привода. Система состоит из следующих компонентов (рис. «Схема рулевого управления с электроусилителем» ):
- Рулевая колонка, соединяющая шестеренку рулевого механизма с рулевым колесом автомобиля;
- Шестерня, преобразующая вращательное рулевое движение в линейное перемещение зубчатой рейки;
- Зубчатая рейка, соединенная с колесами через тяги и рычаги;
- Датчики, регистрирующие информацию для вычисления необходимого дополнительного крутящего момента на шестерне;
- Серво-блок, состоящий из ЭБУ и серводвигателя (электродвигателя), генерирующего дополнительный крутящий момент на шестерне.
Когда водитель поворачивает рулевое колесо, датчик регистрирует прилагаемый крутящий момент и отправляет эту информацию в виде электрического сигнала (аналогового или цифрового) на ЭБУ. ЭБУ вычисляет дополнительный крутящий момент и на основании вычисленного значения активирует серводвигатель. В настоящее время в качестве серводвигателей используются коллекторные или бесщеточные электродвигатели постоянного тока или трехфазные асинхронные двигатели. В зависимости от необходимых характеристик рулевого управления создаваемый этими электродвигателями крутящий момент составляет 3-6 Н-м.
Направление вращения двигателя зависит от направления вращения рулевого колеса. Возвратное движение рулевого колеса также может быть усилено. Это происходит, когда водитель выходит из поворота. В этой ситуации серводвигатель создает крутящий момент, поддерживающий обратное вращение рулевого колеса в положение движения по прямой.
Серводвигатель передает этот поддерживающий крутящий момент через червячную передачу или механизм типа «винт- шариковая гайка-сектор». В зависимости от варианта рулевого управления он передается на рулевую колонку, шестерню и зубчатую рейку реечного механизма.
Управляющая электроника учитывает различные сигналы и параметры, например, скорость движения, угол поворота рулевого колеса, крутящий момент на рулевой колонке и скорость руления. С помощью других расположенных в автомобиле датчиков и благодаря объединению в сеть ЭБУ рулевого управления с другими ЭБУ, эту систему рулевого управления можно использовать для реализации вспомогательных функций, повышающих комфорт и безопасность движения.
Ориентированное на потребности управление электродвигателем позволяет достичь значительной экономии топлива, в среднем на 0,3 л /100 км по сравнению с гидроусилителем, насос которого приводится в действие от ДВС. В городском цикле экономия топлива возрастает до 0,7 л /100 км.
В случае сбоя энергоснабжения или усиления рулевого управления водитель может продолжить руление чисто механически, но с большими мускульными затратами.
Рулевое управление с наложением угла поворота рулевого колеса
В системе рулевого управления с наложением угол поворота рулевого колеса может увеличиваться или уменьшаться на определенную величину. Эта система обычно комбинирует с управляемой системой рулевого управления с электро- или гидроусилителем. Рулевое управление с наложением угла поворота рулевого колеса не обеспечивает автономной езды, но оптимально адаптирует характеристики рулевого управления к ситуации движения, обеспечивая максимальный комфорт и курсовую устойчивость. При объединении в сеть системы управления с динамическими параметрами такое рулевое управление может еще больше повысить безопасность в критических ситуациях дорожного движения посредством не зависящих от водителя регулировок рулевого управления. Такие системы рулевого управления уже производятся серийно под торговыми марками Active Steering (BMW) и Dynamic Steering (Audi).
Угловое наложение, не зависящее от задаваемого водителем угла поворота рулевого колеса, в настоящее время реализуется двумя техническими решениями.
Планетарный механизм рулевой системы
Двойной планетарный механизм с различными передаточными числами встроен в общее водило планетарной передачи в рулевом механизме (рис. «Планетарный механизм, рулевое управление с наложением» ). Это означает постоянное наличие механической связи между рулевым колесом и управляемыми колесами.
Разные передаточные числа означают, что при повороте водила планетарной передачи задается дополнительный угол поворота. Угол задается электродвигателем, вращающим червячное колесо-водило планетарной передачи.
Волновая зубчатая передача с гибким звеном
Блок наложения угла поворота (рис. «Схема рулевого управления с наложением угла поворота с волновой передачей» ) в этом случае состоит из волновой зубчатой передачи с гибким звеном и электродвигателя с полым валом (рис. «Актуатор рулевого управления с наложением угла поворота с волновой передачей» ). Очень компактная конструкция позволяет встроить этот блок в рулевую колонку без ущерба таким параметрам, как монтажное пространство и поведение при столкновении. Вал на конце с рулевым колесом положительно соединен с гибким шлицем. Поворотное движение рулевого колеса через зубчатое зацепление передается на внутреннюю шестерню (круговой шлиц) для выходного вала. Эллиптический внутренний ротор (валогенератор), размещенный в гибком шлице, приводимый электродвигателем, генерирует наложенный угол поворота через разное количество зубьев между гибким и круговым шлицами. Здесь также имеется постоянная механическая связь между рулевым колесом и управляемыми колесами через зубчатое зацепление волновой передачи.
В пассивном состоянии электродвигатель блокируется электромеханической блокировкой, обеспечивая прямой механический сквозной привод для рулящего движения.
Концепция активации рулевого управления автомобиля
ЭБУ рулевого управления с наложением угла поворота проверяет правдоподобность необходимой информации датчика и анализирует. Он вычисляет заданный угол для электродвигателя и через встроенный задающий каскад генерирует сигналы широтно-импульсной модуляции для активации электродвигателя, который представляет собой бесщеточный электродвигатель постоянного тока со встроенным датчиком положения ротора. Максимальный ток электродвигателя составляет 40 А при напряжении бортовой сети 12 В. Датчик положения ротора позволяет блоку управления регулировать электронную коммутацию и, соответственно, направление вращения ротора. Он также вычисляет и проверяет суммарный заданный дополнительный угол поворота с помощью алгоритма суммирования в программном обеспечении блока управления.
Эффективный угол поворота, сумма угла поворота рулевого колеса и наложенного угла поворота электродвигателя вычисляются блоком управления и передаются по автомобильной шине связи на соответствующие ЭБУ.
Заданное значение эффективного угла поворота
Заданное значение эффективного угла поворота, формируемое в ЭБУ рулевого управления с наложением угла поворота состоит из частичного заданного значения для комфортабельности рулевого управления и частичного заданного значения для стабилизации автомобиля. Сигналы, необходимые для вычисления этих переменных, считываются блоком управления по шине CAN.
Частичное заданное значение для комфортабельности рулевого управления представляет собой зависимое от скорости движения переменное передаточное отношение рулевого управления. Это значение вычисляется из скорости движения автомобиля и угла поворота рулевого колеса. Когда автомобиль неподвижен или движется с небольшой скоростью, к задаваемому водителем углу поворота добавляется определенный угол. Это делает передаточное отношение более чувствительным. Водитель может полностью повернуть колеса менее чем за один полный оборот рулевого колеса. Этот добавочный угол поворота непрерывно уменьшается с ростом скорости движения. Начиная со скорости порядка 80-90 км/ч из задаваемого водителем угла поворота вычитается определенный угол, и рулевое управление становится менее чувствительным. Это обеспечивает устойчивость автомобиля при движении по прямой на высокой скорости и в то же время предотвращает потерю управления над автомобилем из-за слишком резкого руления.
Для вычисления частичного заданного значения для стабилизации автомобиля — в дополнение к углу поворота и скорости движения — перемещение автомобиля измеряется с помощью датчиков угловой скорости поворота вокруг вертикальной оси и бокового ускорения. В системе рулевого управления с наложением используются датчики системы курсовой устойчивости. Как же, как и ESP, запускаемая в ЭБУ вычислительная модель рассчитывает эталонное движение автомобиля. В случае отклонения фактического движения автомобиля от эталонного активируется рулевое управление для стабилизации автомобиля. Обе системы непрерывно обмениваются информацией, чтобы эффект взаимодействия контроллеров ESP и системы рулевого управления с наложением угла поворота был оптимальным.
Концепция безопасности рулевого управления
Все используемые внутренние и внешние сигналы непрерывно контролируются блоком управления, проверяется их правдоподобность. Если сигнал датчика больше не кажется правдоподобным, то дополнительная функция рулевого управления, на базе которой работает датчик, деактивируется. Например, при отказе датчика поворота автомобиля вокруг вертикальной оси отключается измерение угла поворота автомобиля вокруг вертикальной оси системы рулевого управления с наложением угла поворота. Переменное передаточное отношение остается активным.
Если безопасная активация электродвигателя больше невозможна из-за сбоя, то система полностью выключается, и обеспечивается непосредственный сквозной привод рулевого механизма от рулевого колеса путем самоторможения шестеренчатой ступени и электромеханической блокировки. Этот переход на аварийный режим также активируется при остановке ДВС или отключении электропитания, что позволяет, к примеру, отбуксировать автомобиль.
Рулевое управление с усилителем для грузовых автомобилей
Рулевое управление полностью гидравлического типа
Гидростатические системы рулевого управления представляют собой системы рулевого управления с гидроусилителем. Рулящее усилие водителя гидравлически усиливается и исключительно гидравлически передается на управляемые колеса. Поскольку механическая связь отсутствует, то максимально допустимая скорость ограничивается региональным законодательством. В Германии она составляет 25 км/ч. В зависимости от конфигурации системы и свойств аварийного рулевого управления возможно увеличение скорости до 62 км/ч. Поэтому использование этих систем ограничивается спецтехникой.
Рулевое управление с одноконтурным гидроусилителем для грузовых автомобилей
Грузовые автомобили обычно оснащаются рулевым управлением с шариковой гайкой (рис. «Рулевой механизм с шариковой гайкой с усилителем» ). Управляющий клапан встроен в рулевой механизм и вместе с червячной передачей образует единый блок. Вращающее движение рулевого колеса передается по бесконечной цепи рециркулирующих шариков на шариковую гайку. Короткие зубья на шариковой гайке входят в зацепление с зубьями сектора. Создаваемое вращательное движение сектора через рулевой рычаг передается на рулевой привод управляемых колес.
Сервоусилие прилагается так же, как и в реечном рулевом механизме с усилителем — поворотным золотниковым клапаном. Рабочий цилиндр образуется уплотняющей поверхностью между корпусом шариковой гайки и рулевым блоком. Поскольку снаружи корпуса не требуется дополнительных трубопроводов, создается прочный и компактный рулевой блок с высокой выходной мощностью.
Двухконтурная система рулевого управления, предназначенная для большегрузных грузовых автомобилей
Двухконтурные системы рулевого управления (рис. «Двухконтурная система рулевого управления с усилителем» ) требуются тогда, когда необходимые движущие силы на рулевом колесе превышают регламентируемые Правилами ECE-R79 при отказе усилителя рулевого управления. Эти системы рулевого управления отличаются гидравлической избыточностью. Оба контура рулевого управления в этих системах функционально испытываются с помощью индикаторов расхода, и водителю сигнализируется состояние сбоя. Насосы для запитывания независимых контуров рулевого управления должны иметь разные приводы (например, от двигателя, от устройства, работа которого зависит от скорости движения автомобиля или электропривода). При отказе одного контура, к примеру, из-за сбоя в системе рулевого управления или остановки ДВС, автомобилем можно управлять с помощью рабочего резервного контура в соответствии с требованиями законодательства.
Двухконтурные системы обычно принимают форму рулевого управления с шариковой гайкой с усилителем со встроенным вторым клапаном рулевого управления. Этот второй клапан управляет дополнительно установленным рабочим цилиндром и обеспечивает дублирование существующей сервосистемы в рулевом управлении с шариковой гайкой.
В следующей статье я расскажу о тормозной системе автомобиля.
Рекомендую еще почитать:
press.ocenin.ru
4.2 Требования к рулевому управлению
4.2.1 Изменение усилия при повороте рулевого колеса должно быть плавным во всем диапазоне его поворота. Неработоспособность усилителя рулевого управления АТС (при его наличии на АТС) не допускается.
(Измененная редакция, Изм. № 1).
4.2.2 Самопроизвольный поворот рулевого колеса с усилителем рулевого управления от нейтрального положения при неподвижном состоянии АТС и работающем двигателе не допускается.
4.2.3 Суммарный люфт в рулевом управлении не должен превышать предельных значений, установленных изготовителем в эксплуатационной документации, или при отсутствии данных, установленных изготовителем, следующих предельных значений:
— легковые автомобили и созданные на базе их агрегатов грузовые | |
автомобили и автобусы | 10° |
— автобусы | 20° |
— грузовые автомобили | 25° |
(Измененная редакция, Изм. № 1).
4.2.4 Максимальный поворот рулевого колеса должен ограничиваться только устройствами, предусмотренными конструкцией АТС.
4.2.5 Повреждения и отсутствие деталей крепления рулевой колонки и картера рулевого механизма, а также повышение подвижности деталей рулевого привода относительно друг друга или кузова (рамы), не предусмотренное изготовителем АТС (в эксплуатационной документации), не допускаются. Резьбовые соединения должны быть затянуты и зафиксированы способом, предусмотренным изготовителем АТС. Люфт в соединениях рычагов поворотных цапф и шарнирах рулевых тяг не допускается. Устройство фиксации положения рулевой колонки с регулируемым положением рулевого колеса должно быть работоспособно.
(Измененная редакция, Изм. № 1).
4.2.6 Применение в рулевом механизме и рулевом приводе деталей со следами остаточной деформации, с трещинами и другими дефектами не допускается.
4.2.7 Уровень рабочей жидкости в резервуаре усилителя рулевого управления должен соответствовать требованиям, установленным изготовителем АТС в эксплуатационной документации. Подтекание рабочей жидкости в гидросистеме усилителя не допускается.
(Измененная редакция, Изм. № 1).
4.3 Требования к внешним световым приборам и светоотражающей маркировке
4.3.1 Количество, тип, расположение, режим работы и цвет огней внешних световых приборов на АТС должны соответствовать требованиям конструкции автотранспортного средства. (Измененная редакция, Изм. № 1).
4.3.2 Изменение цвета огней, режима работы, мест расположения и демонтаж предусмотренных конструкцией АТС фар, сигнальных фонарей и световозвращателей допускается только в случаях, когда:
— комплектация АТС, в том числе снятых с производства, внешними световыми приборами проводится в соответствии с таблицей 6а;
— комплектация АТС проводится в соответствии с 4.3.2.3. (Измененная редакция, Изм. № 1).
Таблица 6а – Требования Правил ЕЭК ООНк наличию внешних световых приборов на автотранспортных средствах
Наименование внешних световых приборов | Цвет излучения | Число приборов на АТС | Наличие приборов на АТС в зависимости от категорий | ||
1 | 2 | 3 | 4 | ||
Фара дальнего света | Белый | 2 или 4 | Обязательно для категорий М, N. Запрещено для категорий О. | ||
Фара ближнего света | Белый | 2 | |||
Передняя противотуманная фара | Белый или желтый | 2 | Рекомендуется (для категорий М, N) | ||
Фара заднего хода | Белый | 1 или 2 | Обязательно для категорий М, N, О2, О3, О4. Рекомендуется для категории О1 | ||
Указатель поворота | Передний | Желтый | 2 | Обязательно для категорий М, N. Запрещено для категорий О | |
Задний | Желтый | 2 | Обязательно | ||
Боковой | Желтый | 2 | Обязательно для категорий М, N. Запрещено для категорий О | ||
Фонарь сигнала торможения | Красный | 2 | Обязательно | ||
Дополнительный сигнал торможения | Красный | 1 или 2 | Обязательно для категории М1, допускается для остальных категорий АТС | ||
Передний габаритный огонь | Белый | 2 | Обязательно | ||
Задний габаритный огонь | Красный | 2 | Обязательно | ||
Задний противотуманный фонарь | Красный | 1 или 2 | Обязательно | ||
Стояночный огонь (при совмещении с боковыми указателями поворота и боко- | Передний | Белый | 2 | Рекомендуется для АТС длиной до 6 м и шириной до 2 м и запрещено на остальных АТС | |
выми габаритными фонаря | Задний | Красный | 2 | ||
ми) | Боковой | Желтый | 2 | ||
Боковой габаритный фонарь | Желтый (красный — при группировании, комбинировании или совмещении с задним габаритным, контурным огнями и сигналом торможения) | Не менее двух с каждой стороны. Расстояния между соседними фонарями должно быть не более 4 м | Обязательно на АТС длиной более 6 м, за исключением грузовых автомобилей без кузова | ||
Контурный огонь | Передний | Белый | 2 | Обязательно на АТС шириной более 2,1 м. Рекомендуется для АТС шириной от 1,8 до 2,1 м | |
Задний | Красный | 2 | и для грузовых автомобилей без кузова | ||
Фонарь освещения заднего государственного регистрационного знака | Белый | 1 или более | Обязательно | ||
studfile.net
ГОСТ Р 51961-2002 (ИСО 10998-95) Тракторы сельскохозяйственные колесные. Требования к рулевому управлению, ГОСТ Р от 27 ноября 2002 года №51961-2002
ГОСТ Р 51961-2002
(ИСО 10998-95)
Группа Д25
Тракторы сельскохозяйственные колесные
ТРЕБОВАНИЯ К РУЛЕВОМУ УПРАВЛЕНИЮ
Agricultural wheeled tractors. Steering requirements
ОКС 65.060.10
ОКП 47 9136
Дата введения 2004-01-01
1 РАЗРАБОТАН И ВНЕСЕН Техническим комитетом по стандартизации ТК 275 «Тракторы»
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 27 ноября 2002 г. N 432-ст
3 Настоящий стандарт идентичен международному стандарту ИСО 10998-95 «Сельскохозяйственные колесные тракторы. Требования к рулевому управлению», соответствует «Директиве Совета 75/321/ЕЭС от 20 мая 1975 г. по приведению в соответствие законов, действующих в странах — членах Сообщества, касающихся рулевого управления колесных сельскохозяйственных и лесных тракторов» в части требований к рулевому управлению и содержит дополнительные требования, отражающие потребности экономики страны, выделенные в тексте стандарта курсивом
4 ВВЕДЕН ВПЕРВЫЕ
1 Область применения
Настоящий стандарт распространяется на сельскохозяйственные колесные тракторы (далее — тракторы) и устанавливает типы рулевого управления тракторов и основные требования к нему.
Требования стандарта являются обязательными, за исключением 5.5.1, 5.6.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 12.2.120-88 (ИСО 3411-82, ИСО 3449-80, ИСО 3457-79, ИСО 3471-80, ИСО 3789-1-81, ИСО 3789-2-82, ИСО 4253-77, ИСО 4552-82, ИСО 5353-78, ИСО 5700-84, ИСО 6011-78, ИСО 6405-82, ИСО 6682-86, ИСО 6683-81) Система стандартов безопасности труда. Кабины и рабочие места операторов тракторов, самоходных строительно-дорожных машин, одноосных тягачей, карьерных самосвалов и самоходных сельскохозяйственных машин. Общие требования безопасности
ГОСТ Р 51960-2002 (ИСО 789-11:1996) Тракторы сельскохозяйственные колесные. Метод оценки управляемости
3 Определения
В настоящем стандарте применяются следующие термины с соответствующими определениями.
3.1 рулевое управление: Оборудование, предназначенное для сохранения и изменения направления движения трактора.
3.2 орган рулевого управления: Часть рулевого управления, на которое непосредственно воздействует оператор для сохранения или изменения направления движения трактора.
3.3 рулевое колесо: Орган управления, вращением которого изменяют направление движения трактора.
3.4 рулевой механизм: Элементы рулевого управления, служащие для передачи усилия от органа управления на управляемые колеса трактора, за исключением источника энергии на тракторе, предназначенного для создания дополнительного усилия для поворота управляемых колес.
Примечание — Рулевой механизм может быть механическим, гидравлическим, пневматическим, электрическим или комбинированным.
3.5 усилие управления на рулевом колесе: Сила сопротивления перемещению рулевого колеса при воздействии на него оператора для изменения направления движения трактора.
3.6 усилитель рулевого управления: Часть рулевого управления, создающая в дополнение к усилию оператора необходимое усилие для поворота управляемых колес, используя энергию источника на тракторе.
3.7 сервопривод: Устройство, создающее усилие в рулевом управлении для поворота управляемых колес исключительно энергией источника на тракторе без применения физического усилия оператора.
3.8 источник энергии на тракторе: Источник энергии для действия рулевого управления или сервопривода рулевого управления, имеющий привод от двигателя трактора. Энергия может создаваться гидравлической, пневматической или электрической системами или комбинацией этих систем
3.9 управляемые колеса: Все колеса трактора, при изменении положения которых относительно продольной плоскости трактора (поворотом вправо или влево) изменяется направление движения трактора.
3.10 управляющее усилие: Сумма всех сил, действующих в рулевом механизме, приложенных к управляемым колесам для их поворота.
4 Типы рулевого управления
4.1 В зависимости от источника энергии для создания управляющего усилия для поворота управляемых колес применяют следующие типы рулевого управления:
ручное рулевое управление — тип рулевого управления, в котором для поворота управляемых колес используется исключительно физическое усилие рук оператора;
ручное рулевое управление с усилителем — тип рулевого управления, в котором для поворота управляемых колес используется как физическое усилие рук оператора, так и усилие, создаваемое дополнительным источником энергии на тракторе.
Примечание — Рулевое управление, в котором необходимое усилие для поворота управляемых колес обычно создается источником энергии на тракторе, но при аварии (отказе) источника энергии возможно осуществлять управление трактором с использованием физического усилия оператора, следует рассматривать как рулевое управление с усилителем;
рулевое управление с сервоприводом — тип рулевого управления, в котором усилие для поворота управляемых колес создается исключительно энергией источника на тракторе.
5 Основные требования к рулевому управлению
5.1 Рулевое управление должно обеспечивать:
проезд трактора по траекториям, установленным в ГОСТ Р 51960, со скоростью 10 км/ч при усилиях управления рулевым колесом, установленных в ГОСТ 12.2.120, и при продолжительности движения:
при исправном состоянии рулевого управления — 5 с;
при аварийном состоянии рулевого управления с усилителем (при аварии источника энергии), не соединенным с другим оборудованием, — 8 с;
при аварийном состоянии рулевого управления с гидравлическим усилителем или гидравлического тормозного оборудования, соединенного с рулевым управлением, питающегося от общего источника энергии, — 8 с. При этом усилие на рулевом колесе не должно превышать 400 Н;
управление движением трактора в случае выхода из строя усилителя рулевого управления или сервопривода.
5.2 Общие требования к конструкции
5.2.1 Конструкция рулевого колеса должна обеспечивать удобное схватывание его руками оператора.
Направление движения верхней части рулевого колеса должно соответствовать необходимому изменению направления движения трактора.
5.2.2 Рулевой механизм должен включать только механические части и соответствовать требованиям настоящего стандарта, установленным для механического рулевого управления с гидравлическими, электрическими или пневматическими усилителями поворота управляемых колес.
5.2.3 Конструкция рулевого механизма должна обеспечивать управление движением трактора даже в случае выхода из строя усилителей.
5.2.4 Рулевой механизм должен быть доступен для контроля технического состояния, технического обслуживания и ремонта.
5.3 Гидравлический механизм с питанием от источника энергии на тракторе, определенного в 3.8, должен соответствовать следующим требованиям.
5.3.1 Гидравлическая система должна иметь устройство, предохраняющее ее от давления, превышающего максимальное рабочее давление, установленное изготовителем.
5.3.2 Трубопроводы должны выдерживать давление, превышающее максимальное давление настройки предохранительного клапана в 4 раза.
5.3.3 Трубопроводы должны быть закреплены и расположены так, чтобы они были защищены от повреждений при ударах и от касания друг с другом, а также с другими частями трактора.
5.4 Требования к рулевому управлению с усилителем
5.4.1 В рулевом управлении с усилителем, не имеющим собственного источника энергии, рекомендуется использовать аккумулятор энергии, который, в случае аварии общего источника энергии, будет обеспечивать питание рулевого управления приоритетно по отношению к другим потребителям энергии.
5.4.2 Рулевое управление с усилителем должно быть оснащено визуальным или звуковым сигнализатором о падении уровня энергии и о превышении максимально допустимого усилия на рулевом колесе, установленного в ГОСТ 12.2.120.
5.5 Требования к рулевому управлению с сервоприводом
5.5.1 В рулевом управлении с сервоприводом рекомендуется использовать дополнительный источник энергии, который при аварии основного источника энергии рулевого управления (или аварии двигателя трактора) будет обеспечивать выполнение двух маневров движения трактора по траектории, установленной в ГОСТ Р 51960.
Дополнительным источником энергии может быть аккумулятор со сжатым воздухом, гидравлический насос или компрессор, приводимый в действие вращением колес трактора и служащий в качестве источника энергии для рулевого управления.
5.5.2 Сервопривод должен быть оснащен визуальным или звуковым сигнализатором об аварии дополнительного источника энергии, а также о его работоспособности при запуске двигателя трактора. Сигнализатор допускается не применять, если дополнительный источник энергии работает от вращения колес и не может быть отсоединен от них.
5.5.3 При применении пневматического дополнительного источника энергии резервуар со сжатым воздухом должен иметь вместимость, обеспечивающую совершение не менее семи полных (от упора до упора) поворотов рулевого колеса до падения давления не более чем на 50%. Количество поворотов определяют при поднятых над опорной поверхностью управляемых колесах.
Текст документа сверен по:
официальное издание
М.: ИПК Издательство стандартов, 2003
docs.cntd.ru