Disgear » Как работает CAN-шина и для чего она нужна в автомобиле?
Сегодня автомобиль, представляет из себя, не просто средство на колесах с двигателем и аналоговыми релюхами, которые было при поломке с легкостью заменить не только специалиста, но и мало-мальски грамотному человеку. Автомобиль сегодня представляет из себя целый компьютер да и еще в добавок, передвигающийся на колесах.
И даже грамотный человек в сегодняшнем авто уже не сможет сам разобраться с этими системами электроники и программаторами работающими во благо передвижения автомобиля, а все работы по ремонту и исправностей каких-либо деталей, должны выполнять профессионалы и именно они, а не кто-то другой. И если вам понадобилось до оснастить свой автомобиль каким-либо дополнительным оборудованием, то доверить своего железно-электронного коня рекомендуем спецам и людям любящим свое дело.
Очень частенько, при обсуждении с клиентами вопросов дополнительного оборудования и систем охраны в автомобили приходится проводить целые лекции на предмет почему той или иной монтаж дополнительного оборудования будет проводиться по времени больше суток, а иногда и несколько, конечно не обходится, при разговоре и без умных узконаправленных значений каких либо элементов автомобильной электроники типа CAN шина, RGB сигналы и пр… интересные штучки, что вводит незнающего человека в ступор, да я и сам когда-то, так же слушал про это все.))
Что такое автомобильная CAN-shina и для чего она нужна?
За последнее время, число различных опций в автомобиле выросло в разы. Увеличение опций произошло благодаря гонке за улучшения качества и пожеланиям клиентов и их потребностям не просто передвигаться, а передвигаться с комфортом, также еще законодательство увеличило требования безопасности окружающей среды. И при всех дополнительных оснащений потребление электроэнергии автомобиля увеличилось в двое.
Но можно было-бы оставить все без изменений и если раньше вопрос стоял о надежности, то сегодня еще к этому всему прибавилась масса различных опций электронного характера. И перед инженерами встает вопрос о приспособлении автомобиля к научно-техническому прогрессу не внося колоссальных изменений в конструкции но при этом учитывая все тонкости безопасности и эксплуатации.
Учитывая и стандартно применяющаяся схема однопроводного подключения к массе аккумулятора «GND (минус)», а вторым подключение является подключение массы к кузову, а плюсовой провод тянется по всему автомобилю и питается напрямую от генератора, и когда общая длина проводки в автомобиле достигла с километр и весом более центнера, выяснилось, что однопроводная схема хороша, но не во всем, как думали об этом прежде.

Для уменьшения проводов в автомобиле и увеличения скорости передачи данных появилась CAN-шина (от англ. Controller Area Network) «сеть пространства датчиков», которую применяют с сохранением минуса на кузове автомобиля и для уменьшения огромных килограммовых жгутов в автомобиле. Эта разработка велась крупной компанией BOSCH с 1970 года, пройдя международную сертификацию «ISO» в 1993 году вышла на массовое производство примерно с 2011 года.
Для чего все таки нужна CAN-шина, принципы ее работы?
Современный автомобиль обладает современной бортовой электроникой с огромным количеством управляюще-исполнительных модулей, к ним можно отнести всевозможные контроллеры, датчики и пр…, а для обмена информацией требовалась надежная и быстрая передача данных, для общения между приборами.
Современная CAN-шина обеспечивает дуплексную систему для одновременной приемо-передачи цифровой информации, обрабатывая ее одним блоком, где скорость передачи данных играет немаловажную роль. Реализация кан шины представляет с собой витую пару и позволила в разы уменьшить электромагнитные поля, которые возникают при работе генератора и других немаловажных систем автомобиля.
Обычно проводка CAN-шины оранжевых цветов, отличаясь друг от друга различными цветными полосками (CAN-Higt – черная, а CAN-Low – оранжево-серая).
С приходом CAN шины и началом ее применения, схема автомобильных проводников высвободилась от определенного количества проводников, которые обеспечивали связь контроллера управления между диагностическим разъемом, двигателем, мультимедией (навигационные системы на ОС Android), системой защиты автомобиля и пр…, по протоколу KWP 2000.
 Протокол управления автомобилем при помощи CAN шины KWP 2000
Протокол управления автомобилем при помощи CAN шины KWP 2000Скорость обработки данных по CAN-шине может быть до 1 Мбит/с, а скорость обработки информации между жизненно важными системами в автомобиле, например – система безопасности торможения ABS, трансмиссия двигателя составляет 500 кбит/с. Помимо основных систем в автомобиле присутствует система комплектации в которую входят – подушки безопасности, мультимедия для автомобиля, блоки управления в дверях авто и пр.. может составить 100 кбит/с.
При обмене информацией между какими-либо блоками управления, и при помощи трансивера сигналы приемо-передачи информации усиливаются до необходимого уровня.
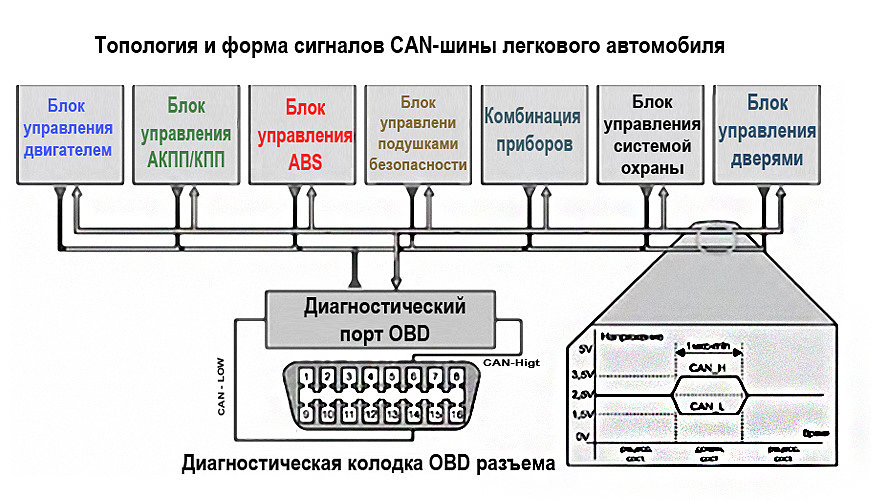 Топология и формы сигналов CAN-шины
Топология и формы сигналов CAN-шиныКаждый блок подключенный к CAN-шине обладает определенным входным сопротивлением, в следствии чего, образуется нагрузка СAN модуля. Нагрузка на центральную CAN шине зависит от одновременного подключения и использования исполнительных механизмов и электронных блоков управления автомобилем и различными датчиками, например – сопротивление силового агрегата подключенного к CAN-шине составляет в среднем 68 Ом, информационно-командные системы «комплектации КОМФОРТ» от 2,0 до 3,5 кОм. В момент обесточивания всей системы отключается и нагрузочное сопротивление модулей работающих по CAN-шине.
Системные, автомобильные блоки управления, обладают помимо различных нагрузочных сопротивлений еще и скоростью передачи данных, что может привести к препятствию в момент обработки разнохарактерных импульсов.
Для решения технической проблемы разнохарактерных импульсов применяется для связи между шинами межсетевой преобразователь.
Преобразователь – это, так называемый межсетевой-интерфейс, в автомобиле применяется в блоке управления или отдельно стоящим блоком и пр… Преобразовывающий интерфейс применяется для различного ввода / вывода информации диагностического разъема OBD, по определенному проводу выведенному к диагностическому разъему и соединяющий центральный блок управления OBD разъемом при помощи CAN-шины.
OBD – это унифицированный диагностический разъем с массой удобств и преимуществ для сканирования автомобиля на предмет ошибок и диагностики.
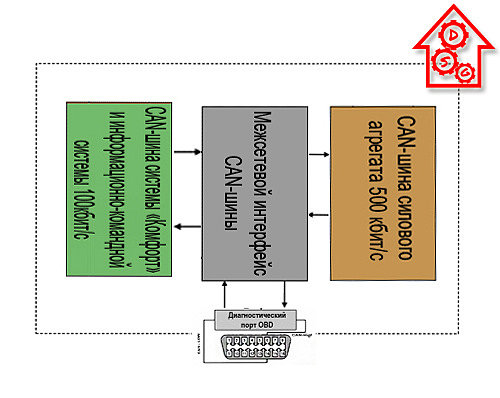 Блок-схема межсетевого CAN интерфейса.
Блок-схема межсетевого CAN интерфейса.Как показано на картинке, общение в автомобиле электронных блоков CAN шины происходят при помощи разных блоков, но делающие одно дело, силовой агрегат CAN-шины, информационной-командной системы и системы Комфорт, в зависимости от марки автомобиля и по своему составу, блоки могут отличаться, но суть идее остается неизменной.
Диагностика автомобиля на предмет неисправностей производится посредством подключения специализированного диагностического оборудования с необходимым программным обеспечением, так называемого анализатора CAN-шины или при помощи осциллографа (с анализатором шины CHN) и мультиметра (цифрового).
Проверку на предмет работы CAN – шины начинаются с измерения между проводами CAN сопротивления. Но необходимо помнить о том, что CAN-блок шины информационно-командной системы и системой «КОМФОРТ» постоянно находятся под напряжением, что не скажешь про силовой агрегат. Для этого в момент проверки рекомендуется отсоединить аккумулятор, можно обойтись одной из 2 клемм (плюсом или минусом).
В основном все неисправности CAN-шины заключаются в обрыве или замыкании линий, нагрузочных резисторов, нарушением логики работы или понижением уровня сигналов. В случае с нарушением логики поиск и обнаружение проблемы можно только при помощи анализатора CAN – шины.
Какие блоки управления в основном применяются в современном автомобиле и соединяются по CAN-шине
1) Что входит в CAN-шина силового агрегата и какие присутствуют электронные блоки управления:
- Управление двигателем
- Управление коробкой передачи
- Управление подушками безопасности
- Управление АБС (системой экстренного торможения)
- Управление электро усилителя руля
- Управление ТНВД
- Управление отопительной системой
- Управление штатной сигнализацией
- Управление центральный монтажным блоком
- Управление электронным замком зажигания
- Управление датчиками поворота рулевого колеса и угла их поворота
2) Какие электронные блоки входят в CAN-шину системы «Комфорт» и комбинацию приборов:
- Управление электронными блоками дверей
- Управление электронными блоками парковочной системы (датчики парковки «Автомобильные парктроники»)
- Управление электронными блоками стеклоочистителей
- Датчики контроля давления в шинах
3) Какие электронные блоки входят в CAN-шину информационно-командной системы:
- Управление комбинация приборов
- Управление звуковой системой и ее воспроизведения
- Управление информационной системой
- Управление автомобильной навигационной системой (автомобильная мультимедия)
Как я добавил функции автомобилю по шине CAN, не умея программировать / Habr
Цель этой статьи — рассказать о моём опыте модификации автомобиля и экспериментах с шиной CAN.
Сначала я решил добавить фронтальную камеру в свой 2017 Chevrolet Cruze. Поскольку у автомобиля уже есть заводская камера заднего вида, то на высоком уровне нужно было выяснить две вещи:
- Способ передачи видео с фронтальной камеры, которую я добавлю.
- Способ отображения на экране картинки с камеры заднего вида в любое время.
Видеочасть была простой. Из предыдущего опыта я знал, что можно сделать видеомикшер на реле.
Запуск на экране оказался более сложным, и после некоторого расследования я пришёл к выводу, что машина должна подавать сигнал от камеры заднего вида на экран через какую-то шину данных.
У Chevrolet две разные шины данных. Первая — это стандартная CAN, быстрая (500 Кбит/с) и надёжная, она используется для критических данных. Вторая — то, что GM называет LAN (GMLAN), более старая и медленная шина (33,3 Кбит/с), которая используется для данных, не связанных с безопасностью.
Мне нужен был способ прослушивать трафик по CAN, то есть снифер. Для этой цели невероятно полезно устройство PCAN.
Peak Can
Peak Can (PCAN) представляет собой USB-устройство, способное перехватывать и передавать сообщения. Благодаря программному обеспечению Pcan View можно начинать работу без особого обучения.
Поскольку камера заднего вида менее важна для безопасности, чем другие компоненты, я предположил, что искомые данные, скорее всего, будут на шине GMLAN.
Самая простая точка доступа — разъём OBD2. Я подключил Peak Can к шине GMLAN, запустил программное обеспечение — и сразу началось прослушивание трафика.
Цель состояла в том, чтобы перепроектировать вызов камеры заднего вида. Для этого с включённым снифером я повёл машину задним ходом, чтобы она включила дисплей, а затем несколько раз попробовал парковаться. На протяжении всего этого процесса я заметил один ID с сообщениями, которые последовательно имитировали мои действия.
Тогда я припарковался и через Pcan View попытался передать то же самое сообщение, которое я видел, когда включался и выключался дисплей. В мгновение ока я уже взаимодействовал с шиной.
Передача сообщения через PCAN
Впрочем, я не планировал постоянно ездить с ноутбуком. Нужен был способ автоматизировать эти функции — и здесь пригодилась Arduino. Возможность напрямую получать питание 12V в сочетании с большим количеством ресурсов и поддержки в интернете сделала этот выбор очевидным.
В дополнение к Arduino для завершения проекта мне понадобилось два компонента: модуль CAN и модуль реле. По сути, Arduino — это мозг, запускающий и выполняющий код. Модуль CAN предоставляет возможность взаимодействовать с шиной данных, а реле обеспечивает питание фронтальной камеры, а также действует как видеомикшер между ней и камерой заднего вида.
Модуль mcp2515 (сверху), Arduino Uno (посередине), модуль реле (снизу)
После добавления и настройки соответствующих библиотек Arduino установил связь с автомобилем.
Прослушивание трафика через Arduino
Поскольку я уже знал, что могу запустить дисплей, то начал думать о том, КАК это сделать. Первоначальная идея состояла в том, чтобы установить на панели специальную кнопку мгновенного вызова, но я начал думать: «А что ЕЩЁ в сети можно использовать в качестве триггера?»
В ходе экспериментов я обнаружил, что по шине GMLAN также передаются сообщения с ID, соответствующим кнопке «Отмена круиз-контроля». Это было идеально, потому что круиз-контроль включается на скоростях более 65 км/ч, когда я буду использовать переднюю камеру, а на скоростях ниже 15 км/ч будет включаться камера заднего вида, чтобы помочь с парковкой, так что они никогда не будут перекрываться. После написания некоторого кода я смог заставить Arduino распознать, когда нажимается кнопка отмены круиз-контроля.
Распознавание однократного нажатия кнопки
Однако я не хотел, чтобы камера активировалась каждый раз, когда я отменяю круиз-контроль, поэтому я решил, что лучший подход — превратить её (по сути) в многофункциональную кнопку. Камера активируется только в том случае, если кнопка «дважды нажата».
После долгого уикенда изучения функции millis и отладки кода я успешно запрограммировал распознавание двойного нажатия.
Распознавание двойного нажатия
И когда я привязал его к своим командам для управления дисплеем, у меня собралась довольно крутая небольшая утилита.
Двойное нажатие + команды
Теперь у меня была возможность включать и выключать дисплей, но оставалась одна проблема — что насчёт камеры заднего вида? Мне нужно было, чтобы они с фронтальной камерой работали вместе, словно их так настроили на заводе.
На блок-схеме я изобразил, как я это представляю.
Я быстро понял, что для такой системы нужно в любой момент времени знать состояние трёх переменных:
- Модуль передней камеры: водитель включил или выключил его?
- Дисплей камеры: изображение на дисплее включено или выключено?
- Задний ход: автомобиль в реверсе или нет?
Не имея опыта программирования, это было очень сложно сделать, и я всё свободное время думал о разных подходах.
В конце концов, я добился успеха!
Активный мониторинг
Теперь я смог реализовать операционную логику, которая контролирует реле.
Управление через реле
На протяжении всего процесса я всё больше узнавал об Arduino и заметил, что версия Nano способна делать всё, что нужно, при этом у неё меньший размер и более низкая цена. Она идеально подходит для постоянной установки в автомобиль. Я разработал модель и распечатал на 3D-принтере корпус для размещения компонентов в качестве компактного блока для установки.
3D корпус
Наконец настал день, когда я увидел результаты. Хотя нужно ещё повозиться с таймингом, но было приятно видеть, что модуль корректно работает.
Включение/выключение режима парковки, включение/выключение фронтальной камеры, автоматическое переключение на камеру заднего вида и автоматическое переключение обратно
В целом, этот опыт меня многому научил и открыл глаза на возможности интеграции непосредственно с шиной CAN. Довольно удивительно, чего можно достичь соединением по двум проводам.
В будущем я планирую написать углублённый учебник о том, как добавить дополнительную функциональность к существующим кнопкам в вашем автомобиле, используя бесплатное программное обеспечение и компоненты.
CAN шина автомобиля — Угона.нет
Бортовая электроника современного автомобиля в своем составе имеет большое количество исполнительных и управляющих устройств. К ним относятся всевозможные датчики, контроллеры и т.д.
Для обмена информацией между ними требовалась надежная коммуникационная сеть.
В середине 80-х годов прошлого столетия компанией BOSCH была предложена новая концепция сетевого интерфейса CAN (Controller Area Network).
CAN-шина обеспечивает подключение любых устройств, которые могут одновременно принимать и передавать цифровую информацию (дуплексная система). Собственно шины представляет собой витую пару. Данная реализация шина позволила снизить влияние внешних электромагнитных полей, возникающих при работе двигателя и других систем автомобиля. По такой шине обеспечивается достаточно высокая скорость передачи данных.
Как правило, провода CAN-шины оранжевого цвета, иногда они отличаются различными цветными полосами (CAN-High — черная, CAN-Low — оранжево-коричневая).
Благодаря применению данной системы из состава электрической схемы автомобиля высвободилось определенное количество проводников,которые обеспечивали связь, например, по протоколу KWP 2000 между контроллером системы управления двигателем и штатной сигнализацией, диагностическим оборудованием и т.д.
Скорость передачи данных по CAN-шине может достигать до 1 Мбит/с, при этом скорость передачи информации между блоками управления (двигатель — трансмиссия, ABS — система безопасности) составляет 500 кбит/с (быстрый канал), а скорость передачи информации системы «Комфорт» (блок управления подушками безопасности, блоками управления в дверях автомобиля и т.д.), информационно-командной системы составляет 100 кбит/с (медленный канал).
На рис. 1 показана топология и форма сигналов CAN-шины легкового автомобиля.
При передаче информации какого-либо из блоков управления сигналы усиливаются приемо-передатчиком (трансивером) до необходимого уровня.
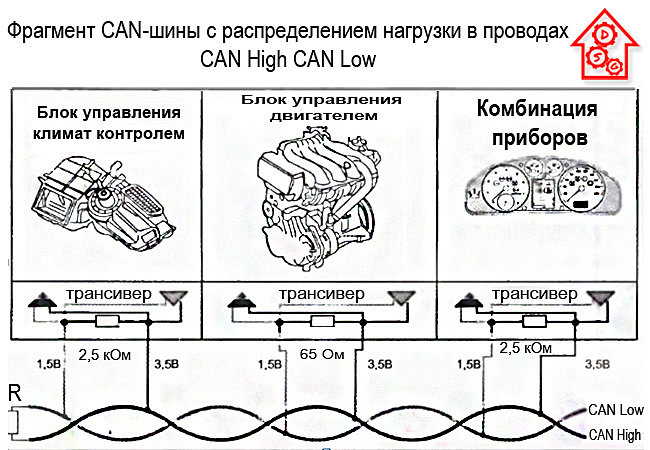
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN. Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов. Так, например, сопротивление блоков управления, подключенных к CAN-шине силового агрегата, в среднем составляет 68 Ом, а системы «Комфорт» и информационно-командной системы — от 2,0 до 3,5 кОм.
Следует учесть, что при выключении питания происходит отключение нагрузочных сопротивлений модулей, подключенных к CAN-шине.
На рис. 2 показан фрагмент CAN-шин с распределением нагрузки в линиях CAN-High, CAN-Low.
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.
Для решения данной технической проблемы используется преобразователь для связи между шинами.
Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Также интерфейс используется для ввода и вывода диагностической информации, запрос которой реализуется по проводу «К», подключенному к интерфейсу или к специальному диагностическому кабелю CAN-шины.
В данном случае большим плюсом в проведении диагностических работ является наличие единого унифицированного диагностического разъема (колодка OBD).
На рис. 3 показана блок-схема межсетевого интерфейса.
Следует учесть, что на некоторых марках автомобилей, например, на Volkswagen Golf V, CAN-шины системы «Комфорт» и информационно-командная система не соединены межсетевым интерфейсом.
В таблице представлены электронные блоки и элементы, относящиеся к CAN-шинам силового агрегата, системы «Комфорт» и информационно-командной системы. Приведенные в таблице элементы и блоки по своему составу могут отличаться в зависимости от марки автомобиля.
Диагностика неисправностей CAN-шины производится с помощью специализированной диагностической аппаратуры (анализаторы CAN-шины) осциллографа (в том числе, со встроенным анализатором шины CHN) и цифрового мультиметра.
Как правило работы по проверке работы CAN-шины начинают с измерения сопротивления между проводами шины. Необходимо иметь в виду, что CAN-шины системы «Комфорт» и информационно-командной системы, в отличие от шины силового агрегата, постоянно находятся под напряжением, поэтому для их проверки следует отключить одну из клемм аккумуляторной батареи.
Основные неисправности CAN-шины в основном связаны с замыканием/обрывом линий (или нагрузочных резисторов на них), снижением уровня сигналов на шине, нарушениями в логике ее работы. В последнем случае поиск дефекта может обеспечить только анализатор CAN-шины.
CAN-шины современного автомобиля
- CAN шина силового агрегата
- Электронный блок управления двигателя
- Электронный блок управления КПП
- Блок управления подушками безопасности
- Электронный блок управления АБС
- Блок управления электроусилителя руля
- Блок управления ТНВД
- Центральный монтажный блок
- Электронный замок зажигания
- Датчик угла поворота рулевого колеса
- CAN-шина системы «Комфорт»
- Комбинация приборов
- Электронные блоки дверей
- Электронный блок контроля парковочной
Системы
- Блок управления системы «Комфорт»
- Блок упрввления стеклоочистителей
- Контроль давления в шинах
CAN-шина информационно-командной системы
- Комбинация приборов
- Система звуковоспроизведения
- Информационная система
- Навигационная система
Источник : Ремонт и Сервис
САN-шина в современных автомобилях — RadioRadar
Автолюбителю
Главная Радиолюбителю Автолюбителю
Бортовая электроника современного автомобиля в своем составе имеет большое количество исполнительных и управляющих устройств. К ним относятся всевозможные датчики, контроллеры и т.д.
Для обмена информацией между ними требовалась надежная коммуникационная сеть.
В середине 80-х годов прошлого столетия компанией BOSCH была предложена новая концепция сетевого интерфейса CAN (Controller Area Network).
CAN-шина обеспечивает подключение любых устройств, которые могут одновременно принимать и передавать цифровую информацию (дуплексная система). Собственно шины представляет собой витую пару. Данная реализация шина позволила снизить влияние внешних электромагнитных полей, возникающих при работе двигателя и других систем автомобиля. По такой шине обеспечивается достаточно высокая скорость передачи данных.
Как правило, провода CAN-шины оранжевого цвета, иногда они отличаются различными цветными полосами (CAN-High — черная, CAN-Low — оранжево-коричневая).
Благодаря применению данной системы из состава электрической схемы автомобиля высвободилось определенное количество проводников,которые обеспечивали связь, например, по протоколу KWP 2000 между контроллером системы управления двигателем и штатной сигнализацией, диагностическим оборудованием и т.д.
Скорость передачи данных по CAN-шине может достигать до 1 Мбит/с, при этом скорость передачи информации между блоками управления (двигатель — трансмиссия, ABS — система безопасности) составляет 500 кбит/с (быстрый канал), а скорость передачи информации системы «Комфорт» (блок управления подушками безопасности, блоками управления в дверях автомобиля и т.д.), информационно-командной системы составляет 100 кбит/с (медленный канал).
На рис. 1 показана топология и форма сигналов CAN-шины легкового автомобиля.
При передаче информации какого-либо из блоков управления сигналы усиливаются приемо-передатчиком (трансивером) до необходимого уровня.
Рис. 1. Топология и формы сигналов CAN-шины
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN. Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов. Так, например, сопротивление блоков управления, подключенных к CAN-шине силового агрегата, в среднем составляет 68 Ом, а системы «Комфорт» и информационно-командной системы — от 2,0 до 3,5 кОм.
Следует учесть, что при выключении питания происходит отключение нагрузочных сопротивлений модулей, подключенных к CAN-шине.
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах CAN High
can-Low
На рис. 2 показан фрагмент CAN-шин с распределением нагрузки в линиях CAN-High, CAN-Low.
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.
Для решения данной технической проблемы используется преобразователь для связи между шинами.
Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Также интерфейс используется для ввода и вывода диагностической информации, запрос которой реализуется по проводу «К», подключенному к интерфейсу или к специальному диагностическому кабелю CAN-шины.
В данном случае большим плюсом в проведении диагностических работ является наличие единого унифицированного диагностического разъема (колодка OBD).
На рис. 3 показана блок-схема межсетевого интерфейса.
Рис. 3. Блок-схема межсетевого интерфейса
Следует учесть, что на некоторых марках автомобилей, например, на Volkswagen Golf V, CAN-шины системы «Комфорт» и информационно-командная система не соединены межсетевым интерфейсом.
В таблице представлены электронные блоки и элементы, относящиеся к CAN-шинам силового агрегата, системы «Комфорт» и информационно-командной системы. Приведенные в таблице элементы и блоки по своему составу могут отличаться в зависимости от марки автомобиля.
Диагностика неисправностей CAN-шины производится с помощью специализированной диагностической аппаратуры (анализаторы CAN-шины) осциллографа (в том числе, со встроенным анализатором шины CHN) и цифрового мультиметра.
Как правило работы по проверке работы CAN-шины начинают с измерения сопротивления между проводами шины. Необходимо иметь в виду, что CAN-шины системы «Комфорт» и информационно-командной системы, в отличие от шины силового агрегата, постоянно находятся под напряжением, поэтому для их проверки следует отключить одну из клемм аккумуляторной батареи.
Основные неисправности CAN-шины в основном связаны с замыканием/обрывом линий (или нагрузочных резисторов на них), снижением уровня сигналов на шине, нарушениями в логике ее работы. В последнем случае поиск дефекта может обеспечить только анализатор CAN-шины.
CAN-шины современного автомобиля
| CAN шина силового агрегата |
| Электронный блок управления двигателя |
| Электронный блок управления КПП |
| Блок управления подушками безопасности |
| Электронный блок управления АБС |
| Блок управления электроусилителя руля |
| Блок управления ТНВД |
| Центральный монтажный блок |
| Электронный замок зажигания |
| Датчик угла поворота рулевого колеса |
| CAN-шина системы «Комфорт» |
| Комбинация приборов |
| Электронные блоки дверей |
| Электронный блок контроля парковочной |
| системы |
| Блок управления системы «Комфорт» |
| Блок упрввления стеклоочистителей |
| Контроль давления в шинах |
| CAN-шина информационно-командной |
| системы |
| Комбинация приборов |
| Система звуковоспроизведения |
| Информационная система |
| Навигационная система |
Дата публикации: 02.06.2009
Рекомендуем к данному материалу …
Мнения читателей
- Валентин / 27.07.2018 — 12:48
кстати не плохая таблица есть в конце этой статьи есть. там показано в каких моделях какие параметры может контролировать кан-шина. через кан-лог https://glonassgps.com/can-sina-kak-s-ee-pomosu-legko-i-nadezno-kontrolirovat-transport - роман / 13.11.2016 — 07:56
Помогите пожалуйста определить К-LINE провод от блока управления двигателя К20 Хонда! Диагностический разъём отсутствует! - ррррррррр / 03.04.2015 — 07:02
купил старлаин а 91 хотел устоновить на опель зафира 2008 года не получается требует кан шина можно обойти без него - Алекс / 06.02.2015 — 16:31
Кто подскажет что делать если выкидывает вот такую вот ошибку «Связь по шине CAN с системой дорожной информации. Нет связи» - Дмитрий / 29.09.2014 — 17:15
По моему здесь АСУшников нет )) Забиваем в интернете CAN интерфейс и всё как на ладони, от кодов, кончая как перепрограммировать всё на своё лад )) - Дмитрий / 29.09.2014 — 17:14
По моему всё просто, поищите в интернете про эту шину и про контроллеры на ней и всй - Павел / 17.08.2014 — 17:36
Очень помогла эта статья,хоть более менее описывается что это такое.Есть вопросик,на всех ли машинах оснащенных КАН-шиной,эти два провода можно найти на диагностическом разъеме,как показано на схеме? - Даня / 08.08.2014 — 15:32
Кан шина может потребоватся для считывания данных в компюторную програмку к примеру програму слежения за авто через прибор gps. вид кан шины зависит от портокола иногда используют переходник «кан лог». в разёме 19 39 прибор подключают к «д» и «с» проводу и копируют данные в прибор отправляя их через модем в програму диспетчера. - Alex / 31.03.2014 — 10:51
Для общего понимания,очень полезная информация. Большое спасибо автору. - Валерий / 02.02.2014 — 21:28
Так и не понял — это зимняя или летняя шина. Но всё равно огромное спасибо. - александр / 11.11.2013 — 07:51
помогите найти кан шину на nexia - александр / 11.11.2013 — 07:45
кто может помоч с кан шиной где и как можно подключится к ней и подключить трекер GalileoSky - л / 17.10.2013 — 19:29
Ооо - вася электрик / 17.10.2013 — 19:27
Скоро автоэлектрику Васе надо будет оксфорд кончать и практику в НАСА проходить. - Эф / 27.09.2013 — 21:58
спасибо!помогло! - Данис / 08.03.2013 — 22:34
Информация в качестве поверхностной — сойдет… Для более глубокого понимания см. Controller Area Network, например в википедии, там делально описаны форматы кадров. Информация, которая передается в кадре никак не стандартизирована и может быть какой угодно, как производитель захочет и разбирать ее нужно с описание протокола производителя или методом проб и ошибок “чёто там ломать/вскрывать”. - alex.ho.ua / 26.02.2013 — 11:27
спасибо очень помогла статья по кановским авто!!! - Виктор / 05.02.2013 — 16:35
Купил CAN адаптер для своего автомобиля, читал что-то подобное на http://carsunit.ru - Я / 05.12.2012 — 20:15
Спасибо! - Vladinir / 21.11.2012 — 15:28
Может кто сталкивался? Интересует, будет-ли работать CAR PC с CANBUS, если его подключить в автомобиле в котором нет CAN шины? Имеется ввиду подключить к OBD2, к выводам «6»-CAN High и «14»-can-Low -для считывания бортовой информации?
Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу: