что такое, зачем нужна и как работает в современном автомобиле
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.

Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).

Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:

Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:

Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.

«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.

Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.

Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.

Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Шина CAN
Именно так выглядит ( в основном) та самая «шина CAN», с которой в последнее время нам придется сталкиваться все чаще и чаще:

фото 1
Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод CAN High (оранжево-черный).
Цвет провода CAN-Low — оранжево-коричневый.
За основной цвет шины CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:
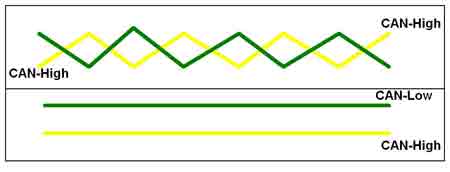
фото 2
CAN-High — желтым цветом
CAN-Low — зеленым цветом
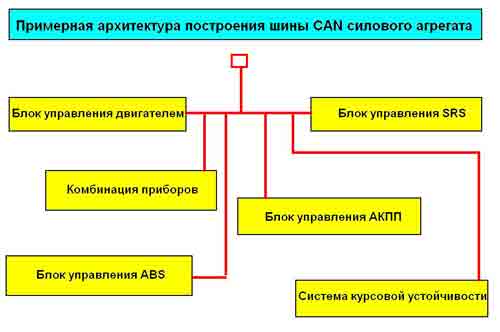
Всего существует несколько разновидностей шин CAN, определяемых выполняемыми ими функциями:
Шина CAN силового агрегата (быстрый канал).
Она позволяет передавать информацию со скоростью) 500 кбит/с и служит для связи между блоками управления (двигатель — трансмиссия)
Шина CAN системы «Комфорт» (медленный канал).
Она позволяет передавать информацию со скоростью 100 кбит/с и служит для связи между блоками управления, входящими в систему «Комфорт».
Шина данных CAN информационно-командной системы (медленный канал), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь между различными обслуживающими системами ( например, телефонной и навигационной системами).
Новые модели автомобилей все более становятся похожими на самолеты — по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и «тянуть» от каждого грозди проводов — нереально.
Поэтому кроме шины CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем «расплываться мыслью по древу», заострим наше внимание пока что на одной конкретной шине: CAN ( по взглядам корпорации BOSCH).
На примере шины CAN силового агрегата можно посмотреть форму сигнала:
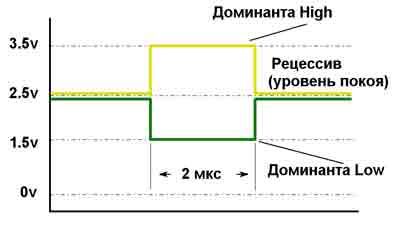
Когда на High шине CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе Low доминантное состояние, то напряжение падает до 1.5 вольта.
(«Доминанта» — явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название Twisted Pair. А провода, которые образуют эту пару, называются CAN High и CAN Low.
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Такое исходное состояние называется «состоянием покоя» или «рецессивом».
Каким образом передаются и преобразуются сигналы по CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:
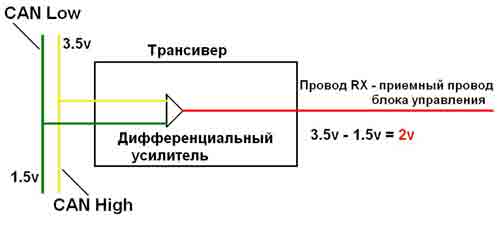
фото 4
Поступающие по проводам High и Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Кстати, насчет помех. Как говорят, «шина CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение».
Попробуем разобраться с этим.
Провода шины CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:
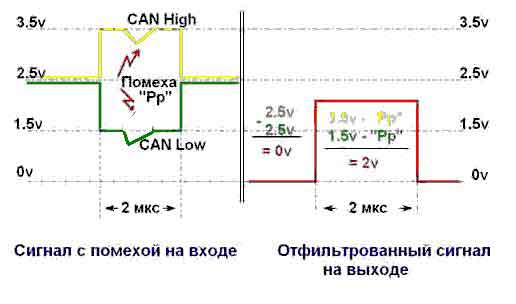
фото 5
Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – «Pp») вычитается из напряжения
на проводе High (3,5 В – «Pp») и в обработанном сигнале помеха отсутствует ( «Pp» — помеха).
Примечание: По наличию времени статья может иметь продолжение — много еще остается «за кадром».
Кучер В.П.
© Легион-Автодата
Вас также может заинтересовать:
Шина CAN — это страшно?
Шина CAN системы «Комфорт»
Шина данных CAN — небольшая заметка по устройству
Побеждаем шину CAN. Часть 1. Технология / Habr
Сегодня я хочу познакомить вас с интересной микроконтроллерной платформой CANNY. Это обзорная статья в которой вы узнаете о технологии, а в последующих статьях я расскажу вам о работе с сообщениями CAN, интеграции CANNY c Arduino Mega Server и о тех возможностях, которые предоставляет эта связка.
Почему CANNY? От названия шины CAN, которая широко используется на транспорте и, в частности, во всех современных автомобилях в качестве бортовой сети. Итак, что же можно сделать, имея специализированный контроллер, подключённый к CAN шине вашего автомобиля?
Шина CAN
Образно говоря, шина CAN это нервная система вашего автомобиля. По ней передаётся вся информация о состоянии блоков и систем, а также управляющие команды, которые во многом определяют поведение автомобиля. Зажигание фар, открывание и закрывание дверей, управление проигрыванием музыки в салоне машины, срабатывание сигнализации и т. д. — всё это работает и управляется по этой шине.
Физически, шина CAN представляет собой два перевитых провода и очень проста в монтаже и подключении. Несмотря на свою простоту, она, благодаря своей дифференциальной природе, хорошо защищена от различных наводок и помех. Высокая надежность и большая допустимая длина сети, до 1000 метров, помогла CAN завоевать широкую популярность у производителей различного, не только автомобильного оборудования.
Контроллеры CANNY
Это целое семейство специализированных контроллеров, имеющих встроенную «родную» поддержку работы с шиной CAN. Это касается как «железной» части, так и поддержки на уровне «софта».
Флагманом линейки является контроллер CANNY 7, наиболее мощный и имеющий максимум возможностей. Большое количество памяти, мощные выходы, позволяющие напрямую управлять реле автомобиля, интеллектуальная система защиты от коротких замыканий, защита от бросков тока и напряжения в бортовой сети автомобиля — всё это делает этот контроллер отличным решением для воплощения любых ваших идей и проектов.
Кроме CANNY 7 в линейке контроллеров присутствует ещё несколько моделей, мы будем проводить свои эксперименты с более простой встраиваемой моделью CANNY 5 Nano. Она также поддерживает работу с CAN шиной, но при этом похожа на уже знакомую нам Arduino Nano.
Визуальное программирование
Развитая поддержка шины CAN это не единственная особенность этих контроллеров, кроме этого CANNY имеют свою собственную среду программирования, CannyLab, но не «обычную», а визуальную, где весь процесс написания программ сводится к манипулированию готовыми структурными блоками, заданию их параметров и соединению входов и выходов этих блоков в определённой последовательности, в соответствии с алгоритмом решаемой задачи.
Ни одной строчки кода!
Хорошо это или плохо? На мой взгляд, это дело привычки. Мне, как человеку привыкшему к «традиционному» программированию, было непривычно манипулировать блоками, вместо написания строк кода. С другой стороны, существует множество приверженцев именно такого подхода к составлению алгоритмов и считается, что для инженеров и «не программистов» это наиболее простой и доступный метод программирования микроконтроллеров.
Мне, как минимум, было «прикольно» составлять программы таким образом и через некоторое время мне это стало даже нравиться. Возможно, что если продолжить этим заниматься, то через некоторое время уже написание кода покажется неудобным.
CannyLab является бесплатной средой разработки и вы можете свободно скачать её с сайта разработчиков, она также не требует специальной процедуры инсталляции — достаточно распаковать файл с архивом — и вы можете начинать работу.
Подключение
Подключение CANNY 5 Nano к компьютеру мало чем отличается от подключения контроллеров Arduino. При наличии в системе драйвера Silicon Labs CP210x, либо после его установки из скаченного дистрибутива CannyLab, Windows создаёт виртуальный COM порт и CANNY готов к работе. В моём случае понадобилось ещё перезагрузить компьютер, но возможно это особенность моей системы.
Практические примеры
Давайте на простых примерах разберём, как в CannyLab выполнять действия, привычные нам в Arduino IDE. Начнём с традиционного мигания светодиодом.
В контроллере CANNY 5 на выводе С4 (Channel 4) присутствует тестовый светодиод (аналог светодиода, находящегося на 13 выводе в Arduino). И его тоже можно использовать для индикации и экспериментов, чем мы и воспользуемся.
Что же нужно, чтобы помигать светодиодом в контроллере CANNY? Нужно сделать всего две вещи — сконфигурировать пин четвертого канала как выход и подать на этот выход сигнал с ШИМ генератора. Все эти действия мы уже не раз проделывали в Arduino IDE, посмотрим как это выглядит в CannyLab.
Итак, конфигурируем пин четвертого канала как выход
Настраиваем генератор ШИМ. Задаём период 500 миллисекунд, заполнение — 250 миллисекунд (то есть 50 %) и 1 (true) на входе генератора «Старт» и… всё! Больше ничего делать не нужно — программа готова, осталось только залить её в контроллер.
Режим симуляции
Тут нужно сказать пару слов о процессе симуляции на компьютере работы контроллера и заливке разработанной программы в память «железного» контроллера.
Среда разработки CannyLab позволяет запускать и отлаживать программу, не записывая её в память контроллера. В режиме симуляции вы можете видеть результат работы программы прямо в реальном времени и даже вмешиваться в её работу.
Заливка в контроллер
Для работы контроллеров CANNY, перед заливкой программы (в терминологии разработчиков «диаграммы») нужно сначала залить операционную систему «Устройство/Системное ПО/Записать». Это нужно сделать только один раз, для этого нужно выбрать соответствующий вашему контроллеру файл с расширением .ccx.
После того, как программа написана и отлажена, её можно загрузить в ваш контроллер. Это делается просто — в меню выбираете пункт «Устройство/Диаграмма/Записать» и через несколько секунд программа оказывается записанной в контроллер.
Далее нужно отключить контроллер от USB порта компьютера, снять перемычку на плате и можно включать запрограммированный контроллер, который после включения будет работать по вашей программе.
Аналоговые входы
Для того, чтобы лучше понять принцип программирования контроллеров CANNY в среде разработке CannyLab, давайте ещё разберём пример работы с аналоговым входом в этой системе.
Как и в предыдущем примере, конфигурируем 4-й пин как выход для того, чтобы иметь возможность управлять работой светодиода.
Включаем АЦП на 10-м канале.
Далее пользуемся двумя логическими блоками, которые выдают 1 на выход, если напряжение находится в заданном диапазоне. Полный диапазон от 0 до 4095.
Блок «Логическое И» довершает работу и со своего выхода управляет работой светодиода на плате.
Вот и всё. То, что мы привычно делали на Arduino, мы легко сделали в CannyLab. Осталось только освоиться в этой среде программирования и вы сможете легко и непринуждённо создавать свои проекты на этой платформе.
Эти простые примеры составления программ даны для того, чтобы вы могли понять принцип визуального программирования микроконтроллеров CANNY. В дальнейшей работе вам поможет отличная справочная документация и поддержка разработчиков на сайте и форуме системы.
Заключение по вводной статье цикла
Подключив контроллер CANNY к своему автомобилю вы сможете реализовать множество интересных и уникальных идей, например, нестандартную сигнализацию, которую не так то легко будет вскрыть (в силу её нестандартности) или добавите новые функции, о которых мечтали, но не надеялись, что это возможно реализовать на практике.
Если вам нравится визуальное программирование в стиле CannyLab, то контроллеры CANNY могут стать для вас интересной альтернативой Arduino или работать в связке с контроллерами Arduino. Об этом мы поговорим во второй статье цикла, в которой я расскажу вам об интеграции контроллеров CANNY с системой Arduino Mega Server.
Напомню, что AMS теперь работает не только на платах Arduino, но и на беспроводных Wi-Fi модулях ESP8266 и именно о такой связке пойдёт речь в следующий раз.
И как обычно, оставайтесь с нами, будет интересно!
Что такое КАН ШИНА?
Современный автомобиль, к сожалению или к счастью — решать Вам, уже не тот ящик на колесах, с полутора десятками проводов, в котором мог разобраться мало мальски грамотный человек, и даже починить, если что-то сломалось… Современный автомобиль — это уже компьютер на колесах, хотите ли Вы этого или нет…. И даже если Вы и не подозреваете об этом, то только по причине того, что занимаются ремонтом Вашего автомобиля профессионалы. Именно они и должны выполнять все работы на Вашем авто. Соответственно и установку дополнительного оборудования лучше доверить специалистам.
Часто при обсуждении вопросов дополнительной охраны автомобиля приходится «читать лекции» клиентам, объясняя , иногда очень долго, почему на их автомобиль сигнализация должна ставиться не 1 час, а как минимум 10 часов, а иногда и полтора — два дня. И часто в этих разговорах приходится упоминать такое словосочетание как «Кан шина», что частенько вводит в ступор клиентов.
Так что же это такое — КАН ШИНА?
И для чего она в автомобиле?
Для нетерпеливых или для тех, кто ищет короткий ответ на свой вопрос или не готов вникать в технический язык описания технологии — переход в другую статью по этой теме.
Сначала ответ на вопрос — для чего?:
Как сэкономить медь?:
Подсчитано, что за последние пять лет число опций в автомобиле, являющихся в большинстве своем потребителями электрической энергии, увеличилось вдвое. И произошло это вовсе не по прихоти автопроизводителей, а благодаря растущим потребностям покупателей в комфорте и законодательным требованиям к безопасности и охране окружающей среды
Все бы ничего, но возможности электрооборудования не безграничны. И если раньше конструкторы решали вопросы, в основном связанные с увеличением надежности, то сейчас приходится думать над созданием принципиально новых схем, которые либо изменят традиционную «архитектуру» электрики, либо позволят ей приспособиться к поступи научно-технического прогресса.
Шины не для колес:
Использующаяся до сих пор однопроводная схема подразумевает, что отрицательные выводы всех потребителей электроэнергии соединяются с «массой» — кузовом и другими металлическими частями автомобиля, которые выступают в роли второго, минусового провода. Однако когда общая длина реальных проводов, подключенных от потребителей к плюсу генератора, достигла полукилометра, а их вес приблизился к центнеру, выяснилось, что однопроводная схема не столь уж и хороша, какой казалось прежде.
Поэтому появилась мультиплексная проводка, а с ней — шина CAN (от Controller Area Network), которую при традиционном сохранении минуса на «массе» применяют вместо «растолстевших» жгутов старой схемы на современных моделях машин, насыщенных электроприводами и электронными блоками.
Далее неплохая статья объясняющая принципы конфигурирования и управления всеми устройствами в современном автомобиле:
Бортовая электроника современного автомобиля в своем составе имеет большое количество исполнительных и управляющих устройств. К ним относятся всевозможные датчики, контроллеры и т.д.
Для обмена информацией между ними требовалась надежная коммуникационная сеть.
В середине 80-х годов прошлого столетия компанией BOSCH была предложена новая концепция сетевого интерфейса CAN (Controller Area Network).
CAN-шина обеспечивает подключение любых устройств, которые могут одновременно принимать и передавать цифровую информацию (дуплексная система). Собственно шины представляет собой витую пару. Данная реализация шина позволила снизить влияние внешних электромагнитных полей, возникающих при работе двигателя и других систем автомобиля. По такой шине обеспечивается достаточно высокая скорость передачи данных.
Как правило, провода CAN-шины оранжевого цвета, иногда они отличаются различными цветными полосами (CAN-High — черная, CAN-Low — оранжево-коричневая).
Благодаря применению данной системы из состава электрической схемы автомобиля высвободилось определенное количество проводников,которые обеспечивали связь, например, по протоколу KWP 2000 между контроллером системы управления двигателем и штатной сигнализацией, диагностическим оборудованием и т.д.
Скорость передачи данных по CAN-шине может достигать до 1 Мбит/с, при этом скорость передачи информации между блоками управления (двигатель — трансмиссия, ABS — система безопасности) составляет 500 кбит/с (быстрый канал), а скорость передачи информации системы «Комфорт» (блок управления подушками безопасности, блоками управления в дверях автомобиля и т.д.), информационно-командной системы составляет 100 кбит/с (медленный канал).
На рис. 1 показана топология и форма сигналов CAN-шины легкового автомобиля.
При передаче информации какого-либо из блоков управления сигналы усиливаются приемо-передатчиком (трансивером) до необходимого уровня.
Рис. 1. Топология и формы сигналов CAN-шины
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN. Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов. Так, например, сопротивление блоков управления, подключенных к CAN-шине силового агрегата, в среднем составляет 68 Ом, а системы «Комфорт» и информационно-командной системы — от 2,0 до 3,5 кОм.
Следует учесть, что при выключении питания происходит отключение нагрузочных сопротивлений модулей, подключенных к CAN-шине.
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах CAN High
can-Low
Еще подробнее и квалифицированней здесь:
На рис. 2 показан фрагмент CAN-шин с распределением нагрузки в линиях CAN-High, CAN-Low.
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.
Для решения данной технической проблемы используется преобразователь для связи между шинами.
Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Также интерфейс используется для ввода и вывода диагностической информации, запрос которой реализуется по проводу «К», подключенному к интерфейсу или к специальному диагностическому кабелю CAN-шины.
В данном случае большим плюсом в проведении диагностических работ является наличие единого унифицированного диагностического разъема (колодка OBD).
На рис. 3 показана блок-схема межсетевого интерфейса.
Рис. 3. Блок-схема межсетевого интерфейса
Следует учесть, что на некоторых марках автомобилей, например, на Volkswagen Golf V, CAN-шины системы «Комфорт» и информационно-командная система не соединены межсетевым интерфейсом.
В таблице представлены электронные блоки и элементы, относящиеся к CAN-шинам силового агрегата, системы «Комфорт» и информационно-командной системы. Приведенные в таблице элементы и блоки по своему составу могут отличаться в зависимости от марки автомобиля.
Диагностика неисправностей CAN-шины производится с помощью специализированной диагностической аппаратуры (анализаторы CAN-шины) осциллографа (в том числе, со встроенным анализатором шины CHN) и цифрового мультиметра.
Как правило работы по проверке работы CAN-шины начинают с измерения сопротивления между проводами шины. Необходимо иметь в виду, что CAN-шины системы «Комфорт» и информационно-командной системы, в отличие от шины силового агрегата, постоянно находятся под напряжением, поэтому для их проверки следует отключить одну из клемм аккумуляторной батареи.
Основные неисправности CAN-шины в основном связаны с замыканием/обрывом линий (или нагрузочных резисторов на них), снижением уровня сигналов на шине, нарушениями в логике ее работы. В последнем случае поиск дефекта может обеспечить только анализатор CAN-шины.
CAN-шины современного автомобиля
В скобках помечено какие из блоков управления, общающихся по шине данных присутствуют в автомобиле ВАЗ 2170 (ПРИОРА)
Единственное, что у наших автомобилей управление все-таки пока реализовано по однопроводной схеме (Шина LIN), но общее представление о том, что такое современный автомобиль производства АВТОВАЗ из таблицы получить можно…
| CAN шина силового агрегата |
| Электронный блок управления двигателя (Присутствует в автомобиле Приора) |
| Электронный блок управления КПП |
| Блок управления подушками безопасности (Присутствует в автомобиле Приора) |
| Электронный блок управления АБС (Присутствует в автомобиле Приора) |
| Блок управления электроусилителя руля (Присутствует в автомобиле Приора) |
| Блок управления ТНВД |
| Блок управления системой отопления (Присутствует в автомобиле Приора) |
| Блок управления штатной сигнализацией (Присутствует в автомобиле Приора) |
| Центральный монтажный блок |
| Электронный замок зажигания |
| Датчик угла поворота рулевого колеса |
| CAN-шина системы «Комфорт» |
| Комбинация приборов (Присутствует в автомобиле Приора) |
| Электронные блоки дверей (Присутствует в автомобиле Приора) |
| Электронный блок контроля парковочной |
| системы |
| Блок управления системы «Комфорт» (Присутствует в автомобиле Приора как блок электропакета) |
| Блок управления стеклоочистителями |
| Контроль давления в шинах |
| CAN-шина информационно-командной |
| системы |
| Комбинация приборов (Присутствует в автомобиле Приора) |
| Система звуковоспроизведения |
| Информационная система |
| Навигационная система |
Как работает can шина на физическом уровне
CAN шина, что же это такое? Много информации читал, но нихрена не понимал. А тут вот нашлось простое и доходчивое объяснение, которое поймёт и ребёнок. А может и не поймет…
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.

Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN


Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN

Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN


Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Немного отступлю от первоисточника.
Самый главный плюс, это очень высокая помехозащищённость сигнала. В чём прикол? Одновременно идут два дублирующих сигнала, только один высокий, второй низкий. Ловят они помеху. Помеха воздействует одинаково на оба сигнала. А на выходе у нас одинаковый уровень. Два уровня сигнала компенсируют помеху. Наглядно это выглядит вот так:

Вот такие пироги. Наткнулся тут : quantexlab
Источник www.drive2.ru
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.

Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).

Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:

Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:

Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.

«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.

Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.

Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.

Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Источник avtocity365.ru

CAN-шина — устройство, облегчающее управление машиной за счет обмена информацией с другими системами авто. Передача данных от одного автомобильного блока к другому осуществляется по специальным каналам с использованием шифрования.
Что такое CAN-шина
Устройство и где находится шина
Инструкция по подключению сигнализации по CAN-шине
Признаки и причины
Как сделать анализатор своими руками?
Плюсы и минусы CAN-шин
Видео «Ремонт CAN-интерфейса своими руками»
Комментарии и Отзывы
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
Виды CAN-шин
Условно CAN-шины можно разделить между собой на два типа в соответствии с использующимися идентификаторами:
- КАН2, 0А. Так маркируются цифровые устройства, которые могут функционировать в 11-битном формате обмена данными. Этот тип интерфейсов по определению не может выявить ошибки на сигналы от модулей, работающих с 29 бит.
- КАН2, 0В. Так маркируются цифровые интерфейсы, функционирующие в 11-битном формате. Но ключевая особенность состоит в том, что данные об ошибках будут передаваться на микропроцессорные устройства, если обнаруживается идентификатор на 29 бит.
CAN-шины могут делиться на три категории в соответствии с видом:
- Для силового агрегата автомобиля. Если подключить к нему такой тип интерфейса, это позволит обеспечить быструю связь между управляющими системами по дополнительному каналу. Предназначение шины заключается в синхронизации работы ЭБУ двигателя с другими узлами. Например, коробкой передач, антиблокировочной системой и т. д.
- Устройства типа Комфорт. Такая разновидность цифровых интерфейсов используется для соединения всех систем данной категории. К примеру, электронной регулировки зеркал, подогрева сидений и т. д.
- Информационно-командные интерфейсы. Имеют аналогичную скорость передачи информации. Используются для обеспечения качественной связи между узлами, необходимыми для обслуживания транспортного средства. К примеру, между электронным блоком управления и навигационной системой или смартфоном.
О принципе действия, а также о разновидностях цифровых интерфейсов рассказал канал «Электротехника и электроника для программистов».
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Что понадобится?
Для выполнения задачи потребуется:
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Неисправности
Поскольку CAN-интерфейс завязан со многими системами автомобиля, при поломке или некорректной работе одного из узлов в нем могут появиться неполадки. Их наличие отразится на функционировании основных агрегатов.
Признаки и причины
О появлении неисправностей могут сообщить такие «симптомы»:
- на приборной панели загорелись одновременно несколько значков без причины — подушки безопасности, рулевое управление, давление в системе смазки и т. д.;
- появился световой индикатор Check Engine;
- на контрольном щитке отсутствует информация о температуре силового агрегата, уровне топлива в баке, скорости т. д.
Причины, по которым могут возникнуть неисправности в работе CAN-интерфейса:
- обрыв проводки в одной из систем или повреждение электролиний;
- короткое замыкание в работе агрегатов на батарею или землю;
- повреждение резиновых перемычек на разъеме;
- окисление контактов, в результате чего нарушается передача сигнала между системами;
- разряд АКБ автомобиля либо падение величины напряжения в электросети, что связано с неправильным функционированием генераторной установки;
- замыкание систем CAN-high либо CAN-low;
- появление неисправностей в работе катушки зажигания.
Подробнее о поломках цифрового интерфейса и тестировании с использованием компьютера рассказал канал «KV Avtoservis».
Диагностика
Чтобы определить причину появления неполадок, потребуется тестер, рекомендуется использование мультиметра.
- Диагностика начинается с поиска проводника витой пары КАН-шины. Кабель имеет черную либо оранжево-серую изоляцию. Первый является доминантным уровнем, а второй — второстепенным.
- С помощью мультиметра производится проверка величины напряжения на контактных элементах. При выполнении задачи зажигание нужно включить. Процедура тестирования позволит выявить напряжение в диапазоне от 0 до 11 вольт. На практике это обычно 4,5 В.
- Выполняется отключение зажигания. От аккумулятора отсоединяется проводник с отрицательным контактом, предварительно гаечным ключом надо ослабить зажим.
- Выполняется измерение параметра сопротивления между проводниками. О замыкании контактов можно узнать, если эта величина стремится к нулю. Когда диагностика показала, что сопротивление бесконечно, то в электролинии имеется обрыв. Проблема может заключаться непосредственно в контакте. Требуется более детально проверить разъем и все провода.
- На практике замыкание обычно происходит из-за поломки управляющих устройств. Для поиска вышедшего из строя модуля следует поочередно отключить от питания каждый блок и выполнить проверку величины сопротивления.
Пользователь Филат Огородников рассказал о диагностике КАН-шины с использованием осциллографа.
Как сделать анализатор своими руками?
Самостоятельно выполнить сборку данного устройства сможет только профессионал в области электроники и электротехники.
Основные нюансы процедуры:
- В соответствии со схемой на первом фото в галерее надо приобрести все элементы для разработки анализатора. На ней подписаны составляющие детали. Потребуется плата с контроллером STM32F103С8Т6. Понадобится электросхема стабилизированного регуляторного устройства и КАН трансивер МСР2551.
- При необходимости в анализатор добавляется блютуз-модуль. Это позволит при эксплуатации девайса записать основную информацию на мобильное устройство.
- Процедура программирования выполняется с использованием любой утилиты. Рекомендуется применение программ КАНХакер или Ардуино. Первый вариант более функциональный и имеет опцию фильтрации пакетных данных.
- Для осуществления прошивки потребуется преобразовательное устройство USB-TTL, оно понадобится для отладки. Простой вариант — применение ST-Link второй версии.
- Загрузив программу на компьютер, основной файл формата ЕХЕ необходимо прошить в контроллер с использованием программатора. После выполнения задачи ставится перемычка бутлоудера, а изготовленное устройство подключается к ПК через USB-выход.
- Заливать прошивку в анализатор можно с использованием программного обеспечения MPH >Фотогалерея
Плюсы и минусы CAN-шин
Преимущества, которыми обладает цифровой интерфейс:
- Быстродействие. Устройство может оперативно обмениваться пакетными данными между разными системами.
- Высокая устойчивость к воздействию электромагнитных помех.
- Все цифровые интерфейсы имеют многоуровневую систему контроля. Благодаря этому можно не допустить появления ошибок при передаче информации и ее приеме.
- При работе шина сама раскидывает скорость по каналам в автоматическом режиме. Благодаря этому обеспечивается эффективная работа электронных систем транспортного средства.
- Цифровой интерфейс является безопасным. Если к электронным узлам и системам автомобиля кто-то попытается получить незаконный доступ, шина автоматически заблокирует эту попытку.
- Наличие цифрового интерфейса позволяет упрощенно произвести монтаж охранной системы на машину с минимальным вмешательством в штатную бортовую сеть.
Минусы, которыми обладает CAN-шина:
- Некоторые интерфейсы имеют ограничения по объему информации, которая может передаваться. Этот недостаток будет весомым для современного автомобиля, «напичканного» электроникой. При добавлении дополнительных устройств на шину возлагается более высокая нагрузка. Из-за этого снижается время отклика.
- Все пакетные данные, которые передаются по шине, имеют определенное назначение. Для полезной информации отводится минимальная часть трафика.
- Если применяется протокол повышенного уровня, это станет причиной отсутствия стандартизации.
Видео «Ремонт CAN-интерфейса своими руками»
Пользователь Roman Brock рассказал о процедуре восстановления шины приборной панели в автомобиле Форд Фокус 2 рестайлинг.
Источник autodvig.com
Использование шины CAN: как программно управлять автомобилем
Использование шины CAN: как программно управлять автомобилем
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.
Автор: Ariel Nuñez
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.
Рисунок 1: Как при помощи приложения управлять ключевыми функциями автомобиля?
Недавно я вместе со своими друзьями из компании Voyage работал над реализацией программного управления системой кондиционирования в Ford Fusion. На данный момент Voyage занимается разработкой бюджетных самоуправляемых автомобилей. Конечная цель: чтобы каждый смог вызвать автомобиль к своей входной двери и безопасно путешествовать туда, куда вздумается. В компании Voyage считают крайне важной возможностью предоставление доступа к ключевым функциям автомобиля с заднего кресла, поскольку не за горами тот день, когда работа водителя будет полностью автоматизирована.
Зачем нужна шина CAN
Современные автомобили используют множество систем управления, которые во многих случаях функционируют подобно микро-службам в веб-разработке. Например, подушки безопасности, тормозные системы, регулирование скорости движения (круиз контроль), электроусилитель руля, аудиосистемы, управление окнами и дверями, подстройка стекл, системы зарядки для электрических автомобилей и т. д. Эти системы должны уметь осуществлять коммуникацию и считывать параметры друг друга. В 1983 в компании Bosch началась разработка шины CAN (Controller Area Network; Локальная сеть контролеров) для решения этой сложной задачи.
Можно сказать, что шина CAN представляет собой простую сеть, где каждая система автомобиля может считывать и отсылать команды. Эта шина интегрируется все сложные компоненты элегантным образом, что дает возможность реализовать всеми любимые функции автомобиля, которыми мы пользуемся. 
Рисунок 2: Впервые шина CAN стала использоваться в 1988 году в БМВ 8 серии
Самоуправляемые автомобили и шина CAN
Поскольку интерес к разработке самоуправляемых автомобилей серьезно вырос, соответственно, словосочетание «шина CAN» также становится популярным. Почему? Большинство компаний, создающих самоуправляемых автомобилей, не занимаются производством с нуля, а пытаются научиться программно управлять машинами после выхода с конвейера фабрики.
Понимание внутреннего устройства шины CAN, используемой в автомобиле, позволяет инженеру формировать команды при помощи программного обеспечения. Самые нужные команды, как вы можете догадаться, связаны с управлением рулем, ускорением и торможением. 
Рисунок 3: Введение в LIDAR (ключевой сенсор самоуправляемого автомобиля)
При помощи сенсоров наподобие LIDAR (light detecting and ranging; оптическая локационная система) машина способна смотреть на мир как суперчеловек. Затем компьютер внутри автомобиля на базе полученной информации принимает решения и посылается команды в шину CAN для управления рулем, ускорение и торможением.
Не каждый автомобиль способен стать самоуправляемым. И по некоторым причинам компания Voyage выбрала модель Ford Fusion (подробнее о причинах можно почитать в этой статье).
Исследование шины CAN в Ford Fusion
Перед началом исследования систем кондиционирования воздуха в Ford Fusion я открыл мою любимую книгу The Car Hacker’s Handbook. Перед погружением в суть вопроса заглянем в Главу 2, где описываются три важные концепции: протоколы шины, шина CAN и CAN-фреймы.
Шина CAN
Шина CAN начала использоваться в американских легковых машинах и небольших грузовиках с 1994 года и с 2008 года в обязательном порядке (в европейских автомобилях с 2001 года). В этой шине предусмотрено два провода: CAN high (CANH) и CAN low (CANL). Шина CAN использует дифференциальный сигналинг, суть которого заключается в том, что при поступлении сигнала на одном проводе вольтаж повышается, а на другом понижается на одну и ту же величину. Дифференциальный сигналинг используется в средах, которые должны быть малочувствительны к шуму, например, в автомобильных системах или при производстве. 
Рисунок 4: Необработанный сигнал шины CAN, отображаемый на осциллографе
С другой стороны, пакеты, передаваемые по шине CAN, не стандартизированы. Каждый пакет содержит 4 ключевых элемента:
- Арбитражный ID (ArbitrationID) представляет собой широковещательно сообщение, идентифицирующее устройство, которое пытается начать коммуникацию. Любое устройство может отсылать несколько арбитражных ID. Если в единицу времени по шине отсылаются два CAN-пакета, пропускается тот, у которого ниже арбитражный ID.
- Расширение идентификатора (Identifierextension; IDE) – в случае с шиной CAN стандартной конфигурации этот бит всегда равен 0.
- Код длины данных (Datalengthcode; DLC) определяет размер данных, который варьируется от 0 до 8 байт.
- Данные. Максимальный размер данных, переносимых стандартной шиной CAN, может быть до 8 байт. В некоторых системах происходит принудительное дополнение пакета до размера 8 байт.

Рисунок 5: Формат стандартных CAN-пакетов
CAN фреймы
Для того чтобы включить / выключить климатическую систему мы должны найти нужную шину CAN (в автомобиле таких шин несколько). В Ford Fusion есть как минимум 4 задокументированные шины. 3 шины работают на высокой скорости 500 кбит/с (High Speed CAN; HS) и 1 шина на средней скорости 125 кбит/с (Medium Speed CAN; MS).
К порту OBD-II подключено две высокоскоростные шины HS1 и HS2, однако там стоит защита, которая не позволяет подделывать команды. Вместе с Аланом из компании Voyage мы вынули порт OBD-II и нашли места соединения со всеми шинами (HS1, HS2, HS3 и MS). На задней стенке OBD-II все шины подключались к модулю шлюза (Gateway Module).
Рисунок 6: Homer – первое самоуправляемое такси от компании Voyage
Поскольку климатическая система управляется через медиа-интерфейс (SYNC), нам придется отсылать команды через среднескоростную шину (MS).
Чтение и запись CAN-пакетов осуществляется при помощи драйвера и сетевого стека SocketCAN, созданного исследовательским отделом компании Volkswagen для ядра в Linux.
Мы будем подсоединять три провода от машины (GND, MSCANH, MSCANL) к переходнику Kvaser Leaf Light HSv2 (можно купить за 300$ на Амазоне) или к CANable (продается за 25$ на Tindie) и загружать на компьютере со свежим Linux-ядром шину CAN в качестве сетевого устройства.
modprobe can
modprobe kvaser_usb
ip link set can0 type can bitrate 1250000
ifconfig can0 up
После загрузки запускаем команду candump can0 и начинаем отслеживать трафик:
can0 33A [8] 00 00 00 00 00 00 00 00 can0 415 [8] 00 00 C4 FB 0F FE 0F FE can0 346 [8] 00 00 00 03 03 00 C0 00 can0 348 [8] 00 00 00 00 00 00 00 00 can0 167 [8] 72 7F FF 10 00 19 F8 00 can0 3E0 [8] 00 00 00 00 80 00 00 00 can0 167 [8] 72 7F FF 10 00 19 F7 00 can0 34E [8] 00 00 00 00 00 00 00 00 can0 358 [8] 00 00 00 00 00 00 00 00 can0 3A4 [8] 00 00 00 00 00 00 00 00 can0 216 [8] 00 00 00 00 82 00 00 00 can0 3AC [8] FF FF FF FF FF FF FF FF can0 415 [8] 00 00 C8 FA 0F FE 0F FE can0 083 [8] 00 00 00 00 00 01 7E F4 can0 2FD [8] D4 00 E3 C1 08 52 00 00 can0 3BC [8] 0C 00 08 96 01 BB 27 00 can0 167 [8] 72 7F FF 10 00 19 F7 00 can0 3BE [8] 00 20 AE EC D2 03 54 00 can0 333 [8] 00 00 00 00 00 00 00 00 can0 42A [8] D6 5B 70 E0 00 00 00 00 can0 42C [8] 05 51 54 00 90 46 A4 00 can0 33B [8] 00 00 00 00 00 00 00 00 can0 42E [8] 93 00 00 E1 78 03 CD 40 can0 42F [8] 7D 04 00 2E 66 04 01 77 can0 167 [8] 72 7F FF 10 00 19 F7 00 can0 3E7 [8] 00 00 00 00 00 00 00 00 can0 216 [8] 00 00 00 00 82 00 00 00 can0 415 [8] 00 00 CC F9 0F FE 0F FE can0 3A5 [8] 00 00 00 00 00 00 00 00 can0 3AD [8] FF FF FF FF FF FF FF FF can0 50B [8] 1E 12 00 00 00 00 00 00
Несмотря на то, что вышеуказанная информация эквивалентна амплитуде звукового сигнала, довольно трудно понять, что происходит, и обнаружить какие-либо закономерности. Нам нужно нечто похожее на частотный анализатор, и такой эквивалент есть в виде утилиты cansniffer. Cansniffer показывает список идентификаторов и позволяет отслеживать изменения в секции данных внутри CAN-фрейма. По мере того как мы будем изучать определенные идентификаторы, мы можем установить фильтр нужных ID, которые имеют отношение к нашей задаче.
На рисунке ниже показан пример информации, снятой при помощи cansniffer с шины MS. Мы отфильтровали все, что имеет отношение к идентификаторам 355, 356 и 358. После нажатия и отпускания кнопок, связанных с подстройкой температуры, в самом конце появляется значение 001C00000000.
Рисунок 7: Информация с шины MS, снятая при помощи утилиты cansniffer
Далее необходимо объединить функционал для управления климатической системой с компьютером, работающим внутри автомобиля. Компьютер работает на операционной системе ROS (Robot Operating System; Операционная система для роботов). Поскольку мы используем SocketCAN, то модуль socketcan_bridge серьезно упрощает задачу по преобразованию CAN-фрейма в блок информации, понимаемый операционной системой ROS.
Ниже показан пример алгоритма декодирования:
if frame.id == 0x356:
raw_data = unpack('BBBBBBBB', frame.data)
fan_speed = raw_data[1] / 4
driver_temp = parse_temperature(raw_data[2:4])
passenger_temp = parse_temperature(raw_data[4:6])
Полученные данные хранятся в CelsiusReport.msg:
bool auto
bool system_on
bool unit_on
bool dual
bool max_cool
bool max_defrost
bool recirculation
bool head_fan
bool feet_fan
bool front_defrost
bool rear_defrost
string driver_temp
string passenger_temp
После нажатия всех нужных кнопок в машине, у нас появляется следующий список:
CONTROL_CODES = {
'ac_toggle': 0x5C,
'ac_unit_toggle': 0x14,
'max_ac_toggle': 0x38,
'recirculation_toggle': 0x3C,
'dual_temperature_toggle': 0x18,
'passenger_temp_up': 0x24,
'passenger_temp_down': 0x28,
'driver_temp_up': 0x1C,
'driver_temp_down': 0x20,
'auto': 0x34,
'wheel_heat_toggle': 0x78,
'defrost_max_toggle': 0x64,
'defrost_toggle': 0x4C,
'rear_defrost_toggle': 0x58,
'body_fan_toggle': 0x04,
'feet_fan_toggle': 0x0C,
'fan_up': 0x2C,
'fan_down': 0x30,
}Затем эти строки отсылаются на узел под управлением операционной системы ROS и далее происходит трансляция в коды, понимаемые автомобилем:
rostopic pub /celsius_control celsius/CelsiusControl ac_toggle
Заключение
Теперь мы можем создавать и посылать те же самые коды в шину CAN, которые формируются при нажатии физических кнопок, связанных с повышением и понижением температуры, что дает возможность удаленного изменения температуры автомобиля при помощи приложения, когда мы находимся на заднем сидении автомобиля.
Рисунок 8: Удаленное управление климатической системой автомобиля
Это лишь небольшой шаг при создании самоуправляемого такси вместе со специалистами компании Voyage. Я получил массу положительных эмоций во время работы над этим проектом. Если вы тоже интересуетесь этой темой, можете ознакомиться со списком вакансий в компании Voyage.
Получение данных с CAN-шины автомобиля
Инновации или уже реальность?
Задача: Получить доступ к показаниям штатных датчиков автомобиля без установки дополнительных.
Решение: Считывание данных с CAN-шины автомобиля.
Когда заходит речь о мониторинге таких параметров, как скорость транспортного средства и расход топлива, надежным и отработанным решением является установка автотрекера и датчика уровня топлива.
Если же необходим доступ к такой информации, как обороты двигателя, пробег, температура охлаждающей жидкости и другим данным с бортового компьютера – эта задача уже больше похожа на творческую.
Казалось бы, что может быть логичнее: если в автомобиле уже есть все необходимые датчики, то зачем устанавливать новые? Практически все современные автомобили (особенно, если речь идет о личных автомобилях бизнес-класса и дорогостоящей спецтехнике) штатно оборудованы датчиками, информация с которых поступает в бортовой компьютер.
Вопрос состоит только в том, как получить доступ к этой информации. Долгое время эта задача оставалась нерешенной. Но сейчас на рынке спутникового мониторинга работает все больше высококвалифицированных инженеров, которым все-таки под силу найти решение задачи корректного получения таких данных, как:
- обороты двигателя;
- уровень топлива в баке;
- пробег автомобиля;
- температура охлаждающей жидкости двигателя ТС;
- и т.д.
Решение, о котором мы будем говорить в данной статье, состоит в считывании данных с CAN-шины автомобиля.
• Что такое CAN-шина?
CAN (англ. Controller Area Network — сеть контроллеров) — популярный стандарт промышленной сети, ориентированный на объединение в единую сеть различных исполнительных устройств и датчиков, широко используемый в автомобильной автоматике. На сегодняшний день практически все современные автомобили оснащены так называемой цифровой проводкой – автомобильной CAN-шиной.
• Откуда появилась задача считывания данных с CAN-шины?
Задача считывания данных с CAN-шины появилась как следствие задачи оптимизации расходов на эксплуатацию автотранспорта.
В соответствии с типовыми запросами заказчиков, автомобили и спецтехника оснащаются системой спутникового ГЛОНАСС или GPS мониторинга и системой контроля оборота топлива (на базе погружных либо ультразвуковых датчиков уровня топлива).
Но практика показала, что заказчики все чаще интересуются более экономичными способами получения данных, а также такими, которые не требовали бы серьезного вмешательства в конструкцию, а также электрику автомобиля.
Именно таким решением стало получение информации с CAN-шины. Ведь оно имеет целый ряд преимуществ:
1. Экономия на дополнительных устройствах
Не нужно нести значительных расходов на приобретение и установку различных датчиков и устройств.
2. Сохранение гарантии на автомобиль
Обнаружение производителем стороннего вмешательства в конструкцию либо электрику автомобиля грозит практически гарантированным снятием транспортного средства с гарантии. А это явно не входит в сферу интересов автовладельцев.
3. Получение доступа к информации со штатно установленных электронных устройств и датчиков.
В зависимости от электронной системы в автомобиле может быть штатно реализован определенный набор функций. Ко всем этим функциям, теоретически, мы можем получить доступ через CAN-шину. Это может быть пробег, уровень топлива в бензобаке, датчики открытия/закрытия дверей, температура за бортом и в салоне, обороты двигателя, скорость движения, и т.д.
• Какие достоинства и недостатки влечет за собой решение со считыванием данных с CAN-шины?
Достоинства:
• Возможность работы в режиме жёсткого реального времени.
• Простота реализации и минимальные затраты на использование.
• Высокая устойчивость к помехам.
• Надёжный контроль ошибок передачи и приёма.
• Широкий диапазон скоростей работы.
• Большое распространение технологии, наличие широкого ассортимента продуктов от различных поставщиков.
Недостатки:
• Максимальная длина сети обратно пропорциональна скорости передачи.
• Большой размер служебных данных в пакете (по отношению к полезным данным).
• Отсутствие единого общепринятого стандарта на протокол высокого уровня.
Стандарт сети предоставляет широкие возможности для практически безошибочной передачи данных между узлами, оставляя разработчику возможность вложить в этот стандарт всё, что туда сможет поместиться. В этом отношении CAN-шина подобна простому электрическому проводу. Туда можно «затолкать» любой поток информации, который сможет выдержать пропускная способность шины.
Известны примеры передачи звука и изображения по шине CAN. Известен случай создания системы аварийной связи вдоль автодороги длиной несколько десятков километров (Германия). (В первом случае нужна была большая скорость передачи и небольшая длина линии, во втором случае — наоборот).
Изготовители, как правило, не афишируют, как именно они используют полезные байты в пакете. Поэтому FMS прибор не всегда может расшифровать данные, которые «отдает» CAN-шина. Кроме того, не все марки автомобилей имеют CAN-шину. И даже не все автомобили одной марки и модели могут выдавать одинаковую информацию.
Пример реализации решения:
Не так давно компанией Скайсим совместно с партнером был реализован большой проект по мониторингу автотранспорта. В парке были различные грузовые автомобили иностранного производства. В частности, грузовые автомобили Scania p340.
Для того, чтобы проанализировать процесс получения данных с CAN-шины мы, по солгасованию с заказчиком, провели соответствующие исследования на трех автомобилях Scania p340: один 2008 года выпуска, второй начала 2009 и третий конца 2009 года.
Результаты оказались следующими:
- с первого данные получены так и не были;
- со второго был получен только пробег;
- с третьего были получены все интересующие данные (уровень топлива, температура охлаждающей жидкости, обороты двигателя, общий расход, общий пробег).
На рисунке отображен фрагмент сообщения из информационной системы Wialon, где:
Fuel_level – уровень топлива в баке в %;
Temp_aqua – Температура охлаждающей жидкости в градусах Цельсия;
Taho — Данные с тахометра (об/мин).
Регламент реализации решения был следующий:
1. Навигационный прибор Galileo ГЛОНАСС/GPS был подключен к CAN-шине грузовиков.
Данная модель автотрекера была выбрана из-за оптимального сочетания функционала, надежности и стоимости. Кроме того, она поддерживает FMS (Fuel Monitoring System) — систему, которая позволяет регистрировать и контролировать основные параметры использования транспортного средства, т.е. подходит для подключения к CAN-шине.
Схему подключения к CAN-шине со стороны прибора Galileo можно найти в руководстве пользователя. Для подключения со стороны автомобиля необходимо, в первую очередь, найти свитую пару проводов, подходящую к диагностическому разъёму. Диагностический разъем всегда в доступности и располагается вблизи от рулевой колонки. В 16 контактном разъёме по стандарту OBD II это 6-CAN high, 14-CAN low. Обратите внимание, что у проводов High напряжение примерно 2,6-2,7В, у проводов Low оно, как правило на 0,2В меньше.
_________________________________________________________________________
Еще одним уникальным решением, которое было использовано для снятия данных с CAN-шины, стал бесконтактный считыватель данных CAN Crocodile (производство СП Технотон, г. Минск). Он отлично подходит для работы с приборами Galileo.
Преимущества технологии CAN Crocodile:
• CAN Crocodile позволяет получать данные о работе автомобиля из шины CAN без вмешательства в целостность самой шины.
• Считывание данных происходит без механического и электрического контакта с проводами.
• CAN Crocodile применяется для подключения к шине CAN систем GPS/ГЛОНАСС мониторинга, которые получают информацию о режимах работы двигателя, состоянии датчиков, наличии неисправностей и т.д.
• CAN Crocodile не нарушает изоляцию проводов CAN и «слушает» обмен по шине с помощью специального беспроводного приемника.
• Применение CAN Crocodile абсолютно безопасно для автомобиля, незаметно для работы бортового компьютера, диагностического сканера и других электронных систем. Особенно актуально применение CAN Crocodile для гарантийных автомобилей, в которых подключение каких-либо электронных устройств к шине CAN часто служит поводом для снятия с гарантии.
2. Если провода обнаружены и идентифицированы верно, можно приступать к запуску CAN-сканера в приборе Galileo.
3. Выбирается стандарт FMS, скорость для большинства автомобилей 250 000.
4. Запускается сканирование.
5. После окончания сканирования совершается переход на главную страницу конфигуратора. Если сканирование завершено успешно, мы получаем доступ к расшифрованным данным.
6. Если ничего, кроме «end scan» Вы не увидели, тут есть несколько вариантов. Либо было неправильно осуществлено подключение, либо автомобиль по каким-то причинам не выдает данные, либо прибору неизвестен шифр данной CAN-шины. Как уже было сказано, такое случается довольно часто, поскольку пока не существует единого стандарта для передачи данных и их обработки по CAN. К сожалению, как показывает практика, получить полные данные с CAN-шины не всегда удается.
Именно поэтому не каждый запрос на считывание данных с CAN-шины может быть в полной мере реализован. Мы рекомендуем своим партнерам-интеграторам предупреждать об этом заказчиков заранее, для того чтобы в дальнейшем избежать неоправданных ожиданий.
Но есть еще один момент, который важно затронуть.
Чаще всего основной целью клиентов является контроль уровня и расхода топлива.
Даже если данные со штатных датчиков будут успешно получены с CAN-шины, какова их практическая ценность?
Дело в том, что основное назначение штатных датчиков уровня топлива – дать оценку с той степенью точности, которая кажется правильной производителю ТС. Эта точность не может быть ставнима с точностью, которую дает погружной датчик уровня топлива (ДУТ) производства Омникомм или, например, Технотон.
Одна из главных задач, которую решает штатный ДУТ, это чтобы топливо внезапно не закончилось, и водитель понимал общую ситуацию с уровнем топлива в баке. От простого по своему устройству штатного поплавкового датчика сложно ожидать большой точности. Кроме того, бывают случаи, когда штатный датчик искажает данные (например, когда транспорт располагается на склоне).
Выводы
По ряду вышеназванных причин, мы рекомендуем не полагаться полносьтю на показания штатных датчиков уровня топлива, а рассматривать каждую ситуацию индивидуально. Как правило, подходящее решение может быть найдено только совместно с техническими специалистами. У разных производителей ТС разная точность показаний. У всех заказчиков также разные задачи. И только под конкретную задачу целесообразно подбирать средства решения. Кому-то вполне подойдет решение с получением данных с CAN-шины, так как оно в разы дешевле и не требует никаких изменений топливной системы ТС. А вот заказчикам с высокими требованиями по точности разумно рассматривать вариант с погружным ДУТом.