Билеты ПДД 2021, экзамен ПДД онлайн
Билеты ПДД по темам:
1. Общие положения, общие обязанности водителей, обязанности пешеходов и пассажиров
2. Дорожные знаки
3. Дорожная разметка
4. Применение специальных сигналов, сигналы светофора и регулировщика
5. Начало движения и маневрирование, применение аварийной сигнализации
6. Расположение транспортных средств на проезжей части, скорость движения
7. Обгон, опережение, встречный разъезд
8. Остановка и стоянка
9. Проезд перекрестков
10. Пешеходные переходы, остановки, железнодорожные пути, автомагистрали, жилые зоны
11. Световые приборы, звуковые сигналы, буксировка, учебная езда, перевозка людей и грузов, велосипеды, мопеды, гужевые повозки
12. Основы безопасности, первая медицинская помощь, ответственность водителя
×
Здесь Вы можете заново пройти только те вопросы в билетах ПДД, в которых были допущены ошибки.
Правильные ответы на все вопросы билетов ПДД
Ответы на часто задаваемые вопросы по билетам ПДД:
Билет 1 — вопрос 12
Остановка запрещена ближе 5 метров от пешеходного перехода?
Да, но только не от перехода, а перед переходом. Позади него можно останавливаться хоть вплотную, ограничений нет.Посмотреть этот вопрос
Билет 2 — вопрос 13
Почему надо уступать дорогу автобусу на второстепенной дороге?Данный перекресток — регулируемый, и очередность движения на нем определяется не знаками приоритета, а сигналами светофора (пп. 6.15 и 13.3 ). Проще говоря — светофор отменяет знаки «Уступи дорогу» и «Главная дорога». Посмотреть этот вопрос
Билет 6 — вопрос 19
Неправильный ответ?
Ответ А и Г.Не путайте этот вопрос с похожим — Билет 11 вопрос 19 (отличие — есть бордюр).
Посмотреть этот вопрос
Билет 10 — вопрос 17
Использование противотуманных фар отдельно от ближнего света в условиях недостаточной видимости?
Нет, только совместно. В новой редакции правил п. 19.4 написано — «Противотуманные фары могут использоваться в условиях недостаточной видимости с ближним или дальним светом фар». Имеется ввиду только совместно. Посмотреть этот вопрос
Билет 10 — вопрос 18
Без аптечки могут эксплуатироваться все мотоциклы?
Нет — только мотоциклы без бокового прицепа. Не путайте с огнетушителем. Без него могут эксплуатироваться все мотоциклы.Посмотреть этот вопрос
Билет 11 — вопрос 19
Неправильный ответ?
Ответ А и В. Не путайте этот вопрос с похожим — Билет 6 вопрос 19 (отличие — нет бордюра).Посмотреть этот вопрос

Билет 14 — вопрос 16
Правильный ответ — водитель грузового автомобиля?
Нет. Вопрос: кто нарушает? Нарушает — водитель легкового автомобиля.Посмотреть этот вопрос
Билет 15 — вопрос 9
Разве автомобиль находится от меня справа?
Он поворачивает направо, а Вы — налево, поэтому в процессе маневра он окажется от Вас справа, и Вы должны уступить ему дорогу. Именно эта ситуация изображена в этом вопросе.Посмотреть этот вопрос
Билет 16 — вопрос 14
Кольцевая дорога всегда главная?
Да — при отсутствии знаков «Уступи дорогу» или «Стоп». Изменения с 8 ноября 2018 года.Посмотреть этот вопрос
Билет 18 — вопрос 13
Почему не надо уступать дорогу автомобилю, движущемуся по главной дороге?
Данный перекресток — регулируемый, и очередность движения на нем определяется не знаками приоритета, а сигналами светофора (пп.6.15 и 13.3 ). Проще говоря — светофор отменяет знаки «Уступи дорогу» и «Главная дорога».
Посмотреть этот вопрос
Билет 20 — вопрос 11
Разве грузовику что-то мешает начать обгон?
Вы всегда находитесь в автомобиле, расположенном в нижней части рисунка. Вы не можете начать обгон ближнего грузовика, так как он уже начал совершать маневр. Посмотреть этот вопрос
Билет 23 — вопрос 8
В вопросе не указано в каком направлении собирается двигаться автомобиль?
Знак 4.3 «Круговое движение» предписывает Вам движение на данном перекрестке только в направлении, указанном стрелками.Посмотреть этот вопрос
Билет 24 — вопрос 11
Почему нельзя обогнать грузовой автомобиль, если он движется со скоростью менее 30 км/ч, разве он не тихоходный?
В ПДД нигде не сказано, что тихоходными являются ТС, двигающиеся со скоростью менее 30 км/час.Тихоходными считаются ТС, у которых сзади нанесен знак «Тихоходное транспортное средство».
Посмотреть этот вопрос
Билет 28 — вопрос 10
Неправильно указана масса?Нет — именно 2.5 тонн. Есть ограничения как по массе 3.5 тонн, так и по массе 2.5 тонн. Посмотреть этот вопрос
Билет 29 — вопрос 3
Знак 3.20 «Обгон запрещен» запрещает обгон всех транспортных средств?
Нет. По ПДД разрешается обгон двухколесных мотоциклов без коляски.Посмотреть этот вопрос
Билет 29 — вопрос 12
Стоянка запрещена ближе 50 метров от переезда?
Да, но в этом вопросе говорится об остановке. Остановка запрещена непосредственно на переезде.Посмотреть этот вопрос
Билет 29 — вопрос 16
Неправильно указана масса?
Нет — именно 2.5 тонн. Есть ограничения как по массе 3.5 тонн, так и по массе 2.5 тонн.
Посмотреть этот вопрос
Билет 32 — вопрос 3
Запрещено?
Нет — знак 3.7 «Движение с прицепом запрещено» запрещает движение с прицепом только грузовых автомобилей и тракторов, а также буксировку. На легковом автомобиле с прицепом вы можете проехать.Посмотреть этот вопрос
Билет 35 — вопрос 12
Автомобиль А расположен перед знаком, поэтому ему тоже остановка запрещена?
Нет — знак «Остановка запрещена» с табличкой «Зона действия знака» действует только на ту сторону дороги, где он установлен (в данном случае — на правую сторону дороги).Посмотреть этот вопрос
Билет 38 — вопрос 13
Почему надо уступать дорогу автомобилю на второстепенной дороге?
Данный перекресток — регулируемый, и очередность движения на нем определяется не знаками приоритета, а сигналами светофора (пп.6.15 и 13.3 ). Проще говоря — светофор отменяет знаки «Уступи дорогу» и «Главная дорога».
Посмотреть этот вопрос
Решайте все билеты с 1 по 40. Если Вы не знаете правильный ответ на вопрос, Вы можете посмотреть его с помощью кнопки «Подсказка» (снизу под вариантами ответа). В процессе прохождения каждого билета с помощью пиктограммы вверху Вы будете видеть количество правильных и неправильных ответов. После прохождения билета Вам будут показаны: количество использованных подсказок,сами вопросы, иллюстрации к ним, комментарии из Правил дорожного движения, правильные ответы, Ваши ответы и результат. Вы можете предварительно просмотреть все билеты пройдя по вкладке Ответы (над номерами билетов).
Программа выбирает вопросы из разных билетов случайным образом — именно так и происходит на реальном экзамене в ГИБДД. Условия те же.
20 вопросов, при неправильном ответе добавляется 5 вопросов и 5 минут времени. Основное время — 20 минут. Максимальное количество ошибок — 2.
Вы можете посмотреть ответы на самые сложные вопросы ПДД 2021 года, пройдя по вкладке — ЧаВо. После прохождения каждого билета на главной странице экзамена появится пиктограмма с вашим результатом (справа от номера билета), при нажатии на которую можно заново пройти все вопросы с ошибками. Для выбора ответа на вопросы экзамена можно использовать клавиши «1, 2, 3, 4, 5» на клавиатуре, то есть также, как на реальном экзамене в ГИБДД (на компьютере в экзаменационном классе отсутствует мышь).
Для сдачи реального экзамена в ГАИ желательно, чтобы вы успешно сдали как минимум 5 билетов подряд. В этом случае ваш шанс на прохождение теоретического экзамена в ГИБДД будет равен 99%.
Помните, что незнание Правил Дорожного Движения / ПДД не освобождает от ответственности за их нарушение.
Экзамен создан на основе официальных билетов ПДД от 02 января 2020 г, утвержденных Главным управлением по обеспечению безопасности дорожного движения МВД России.
профессиональные курсы по вождению автомобиля, обучение на права в московском учебном центре
СПЕКТР – популярная и престижная автошкола в Москве, осуществляющая подготовку водителей категорий А и В. Мы получили аккредитацию в ГИБДД и работаем на основании лицензии № 035653 (от 25.11.2014 г.). Обучение на права осуществляется в современных учебных центрах с участием квалифицированных инструкторов и в полном соответствии с новыми правилами. Каждый желающий, независимо от опыта и возраста, может записаться на наши курсы вождения автомобиля в Москве и уже через 3–3,5 месяца получить водительское удостоверение.
Стоимость обучения вождению в автошколе СПЕКТР категория «В»Оплата курсов вождения в рассрочку или кредит
Полная программа обучения
Наша автошкола проводит комплексную подготовку водителей легковых автомобилей и мотоциклистов, которая включает изучение теории (134 часа) и практику вождения (56 часов). Также мы помогаем ученикам успешно сдать экзамены и получить желаемое удостоверение. Полная программа обучения в наших автошколах включает теорию, практику и экзамены.
Также мы помогаем ученикам успешно сдать экзамены и получить желаемое удостоверение. Полная программа обучения в наших автошколах включает теорию, практику и экзамены.
Теоретические занятия
На уроках Вы будете изучать:
- правила дорожного движения;
- основы безопасного управления автотранспортом;
- устройством и обслуживанием машин
Теоретические занятия проводят квалифицированные преподаватели. На уроках используются новые методики и мультимедийные средства.
Практические занятия
- перестроение;
- развороты;
- парковка
Практические занятия проходят ежедневно с 7.30 до 21.00. Записаться на уроки можно через «Личный кабинет».
Сдача экзаменов
Предлагая в Москве обучение вождению автомобиля, наша автошкола также помогает ученикам успешно пройти заключительные испытания. Сначала сдаются внутренние экзамены и оформляется свидетельство об окончании автошколы. Затем ученики группой в сопровождении администратора и инструкторов отправляются в ГИБДД. Для прохождения экзаменов мы предоставляем автомобили, на которых Вы проходили обучение. Мы сами готовим документы.
Варианты обучения
Занятия в учебных центрах автошколы СПЕКТР осуществляются в небольших группах на территории современно оборудованных классов. Также мы предлагаем различные индивидуальные программы. VIP могут заказать у нас персональное обучение с выездом инструктора в любую точку Москвы. Также доступны всевозможные вспомогательные занятия: контраварийная (экстремальная) езда, восстановление навыков и многое другое.
Наш учебный автопарк
На уроках вождения используются машины из нашего собственного автопарка.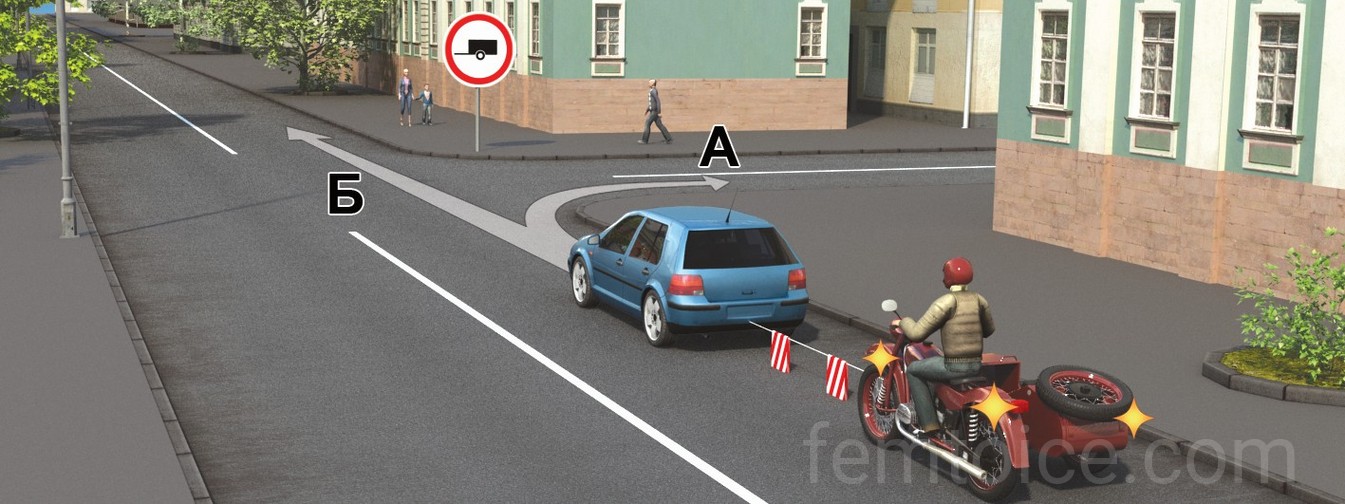
Преимущества обучения в центрах СПЕКТР
Более 50 филиалов автошколы и 50 маршрутов в разных районах города.
Полная стоимость обучения прописывается в договоре.
Квалифицированные инструкторы, среди которых есть женщины с опытом от 8 лет.
Инструктор готов встретить Вас у метро.
Индивидуальный подбор графика, машины, инструктора и места учебы.
Проведение занятий в будни и субботу, в вечернее и утреннее время.
Отсутствие скрытых платежей, предоставление рассрочки или кредита.
Записывайтесь в нашу школу на вождение, подав заявку через официальный сайт или по телефону. Начинайте учебу прямо сейчас, и уже скоро Вы получите желанное удостоверение!
X
Заявка на обучение
Оставьте заявку и мы свяжемся с Вами в ближайшее время
ПДД онлайн
Уважаемый посетитель, мы рады приветствовать Вас на портале «ПДД онлайн»!
Наш сайт рассчитан на всех участников дорожного движения (и водителей, и пешеходов), которые стремятся к соблюдению и изучению ПДД. Здесь можно углубить свои знания правил ДД, повторить подзабытые моменты, прояснить для себя спорные или непонятные вопросы.
Здесь можно углубить свои знания правил ДД, повторить подзабытые моменты, прояснить для себя спорные или непонятные вопросы.
Нашим посетителям мы предлагаем:
- Естественно, сами правила дорожного движения.
- Отдельно вынесено описание дорожных знаков с подробным рубрикатором по их видам.
- Статьи ПДД, касающиеся дорожной разметки.
- Большинство статей ПДД снабжено ссылками на подробный комментарий, который дается на простом, «человеческом» языке.
- Если Вы считаете себя уже матерым дорожным волком, подтвердите это, посетив раздел «Билеты ПДД». Особенно полезен этот раздел будет для тех, кто только изучает правила, ведь при ошибочном ответе на вопрос выводится правильный вариант. ВНИМАНИЕ! Пробовать свои силы можно неограниченное число раз. Мы не собираем информацию о Ваших ответах и никуда ее не передаем.
- Новые штрафы за нарушение правил дорожного движения. Каждый водитель просто обязан знать, за что и на какую сумму его могут оштрафовать.

- Новости – это важный раздел. Он содержит не перечень светских новостей, а выходящие дополнения и изменения к существующим ПДД.
Приглашаем ознакомиться с интересными статьями по тематике «Курс ПДД», «Водительское удостоверение», «Об автошколах» (здесь речь идет обо всем, что связано с обучением вождению автомобиля). Статьи, не попавшие в описанные рубрики, вынесены в раздел с незатейливым названием «Статьи».
Подавляющее большинство рубрик допускают комментирование пользователями. Мы с гордостью относим себя к тому меньшинству, которое не удаляет нелестные для себя замечания. Мы – за конструктивную критику.
Желаем удачного изучения ПДД онлайн и ждем Ваших комментариев, замечаний, пожеланий, а может быть, и целых статей. Давайте вместе сделаем дорогу безопаснее.
Содержание статьи:
- автоасс
- autoass
- авто асс
- www autoass ru
Авто.ру запускает всероссийский экзамен на знание ПДД
На сервисе Авто. ру стартует «Большой экзамен ПДД» — социальный проект, предназначенный для водителей, пешеходов, велосипедистов. В течение месяца все желающие могут пройти тест на pdd.auto.ru. Цель экзамена — мотивировать участников дорожного движения перечитать правила, что позволит сделать дороги безопаснее.
ру стартует «Большой экзамен ПДД» — социальный проект, предназначенный для водителей, пешеходов, велосипедистов. В течение месяца все желающие могут пройти тест на pdd.auto.ru. Цель экзамена — мотивировать участников дорожного движения перечитать правила, что позволит сделать дороги безопаснее.
6 ноября Авто.ру запускает социально значимый проект — всероссийский «Большой экзамен ПДД». На его прохождение дается две попытки. Пройти тест второй раз с одного аккаунта можно в любое время в течение месяца, что будет продолжаться проект. На решение 30 вопросов отведено 25 минут, результаты теста и разбор ошибок доступны сразу же. Экзаменационные вопросы подготовлены профессиональными редакторами и сформулированы таким образом, чтобы заинтересовать пользователей и дать им возможность по-новому взглянуть на шаблонные ситуации.
«Мало кто из автомобилистов после получения водительского удостоверения повторяет ПДД, в результате со временем некоторые правила забываются. А пешеходы часто и вовсе их не знают. Тем временем, по статистике, причина более 90% аварий — человеческий фактор. Цель экзамена — помочь пользователям узнать, насколько хорошо они владеют правилами и мотивировать тех, кто делает ошибки, укрепить свои знания. Формат выбран легкий, развлекательный для того, чтобы как можно более широкая аудитория захотела пройти тестирование. Мы верим, что подобные инициативы помогают делать дороги безопаснее», — говорит Антон Забанных, генеральный директор «Яндекс.Вертикали» (включает Авто.ру).
Тем временем, по статистике, причина более 90% аварий — человеческий фактор. Цель экзамена — помочь пользователям узнать, насколько хорошо они владеют правилами и мотивировать тех, кто делает ошибки, укрепить свои знания. Формат выбран легкий, развлекательный для того, чтобы как можно более широкая аудитория захотела пройти тестирование. Мы верим, что подобные инициативы помогают делать дороги безопаснее», — говорит Антон Забанных, генеральный директор «Яндекс.Вертикали» (включает Авто.ру).
Билеты в «Большом экзамене ПДД» разделены на две категории: для водителей и для всех остальных: пешеходов, велосипедистов и прочих участников дорожного движения. Вопросы — простые, средние и сложные. За правильный ответ на простой вопрос начисляется 1 балл, за средний и сложный — 2 и 3 балла соответственно.
Пользователи, набравшие максимальное количество баллов, смогут принять участие в розыгрыше призов от партнеров экзамена: Российское автомобильное товарищество разыграет карты помощи на дорогах «Хит», «Тинькофф страхование» — бесплатный полис каско на год, Castrol — скидку на масло, FitService — бесплатную диагностику автомобиля, Jo Malone — парфюмерные наборы Cologne Intense, а Яндекс.Плюс предоставит бесплатную подписку на 3 месяца.
Авто.ру — самый популярный сервис по продаже автомобилей в России * — заботится о том, чтобы процесс покупки и продажи транспортного средства был максимально удобным, прозрачным и безопасным, а владение им — комфортным и позитивным. С этой целью сервис запустил Учебник, где собраны статьи, которые помогают выбрать и проверить автомобиль перед покупкой, а также дают ответы на многие вопросы, возникающие в процессе вождения.
* Согласно совместному исследованию аналитического агентства «Автостат» и журнала «За рулем», более трети респондентов для продажи машины используют сайт либо мобильное приложение Авто.ру.
App Store: ПДД 2021: Билеты и Экзамен РФ
Версия 2.25
Теперь можно смотреть подсказки к вопросам в марафоне. Включи режим в настройках приложения.
Оценки и отзывы
4.9 из 5
Оценок: 92.2 тыс.
Оценок: 92.2 тыс.
Одна из лучших программ
Всё классно сделано.Удобно и красиво.Разбивка по темам, тоже очень хорошая идея.Вообщем минусов у приложения нет вообще.
Отлично
Готовилась с помощью него к экзамену в ГИБДД.
Сдала теорию с первого раза 💪🏻
Аккуратно есть ошибки
Аккуратно есть ошибки . У меня есть книга пдд 2019 года и я проходил и учил билеты на ней и ответы отличаются например . При каком значении суммарного люфта в рулевом управлении допускается эксплуатация легкового автомобиля? , по приложению это 20 а по книги 10 . Так что не советую учиться по этому переложению
Разработчик Amayama Auto LLC указал, что в соответствии с политикой конфиденциальности приложения данные могут обрабатываться так, как описано ниже. Подробные сведения доступны в политике конфиденциальности разработчика.
Связанные с пользователем данные
Может вестись сбор следующих данных, которые связаны с личностью пользователя.
- Пользовательский контент
- Идентификаторы
- Данные об использовании
Не связанные с пользователем данные
Может вестись сбор следующих данных, которые не связаны с личностью пользователя.
Конфиденциальные данные могут использоваться по-разному в зависимости от вашего возраста, используемых возможностей или других факторов. Подробнее
Поддерживается
Семейный доступ
С помощью семейного доступа приложением смогут пользоваться до шести участников «Семьи».
Учебный симулятор вождения автомобиля и экзамена в ГИБДД
Данные программные продукты предназначены специально для самостоятельной подготовки начинающих водителей. Они будут полезны как учащимся автошкол, так и тем, кто только планирует начать обучение. С помощью симулятора вождения можно понять основные принципы управления автомобилем и изучить специальные упражнения, а так же подготовиться к теоретическому экзамену в ГИБДД. Профессиональные версии этих программ установлены на автотренажерах и служат для подготовки водителей в автошколах.
City Car Driving 1.5.7 Домашняя версия
Новая версия трехмерного реалистичного самоучителя вождения, разработанного для обучения начинающих водителей базовым навыкам управления автомобилем в условиях большого города и на специально оборудованных автодромах.
Эта совершенно уникальная программа содержит специально созданный виртуальный город с 8 районами, каждый из которых предоставляет идеальную среду для отработки водительских навыков в различных дорожных условиях. Среди них есть два автодрома, соответствующих реальным автодромам для сдачи экзаменов в ГИБДД.
«Умный» трафик с настраиваемой плотностью и характером, точно симулирующий движение транспортных потоков в городе и за его пределами, изменяемое состояние погоды и время суток – всё это позволяет создать условия вождения максимально приближенные к реальным. А контроль правил и улучшенные подсказки (в том числе и голосовые) помогут закрепить теоретические знания правил дорожного движения.
На нашем сайте вы можете скачать торрент City Car Driving 1.5.7
Подготовка к экзамену по ПДД
«Подготовка к экзамену по ПДД» представляет собой мультимедийное интерактивное пособие для самостоятельной проверки знаний правил дорожного движения и подготовки к сдаче квалификационного экзамена по старой и новой методике приема экзамена на получение права управления транспортными средствами категорий «А», «В», «С», «D».
Пособие рассчитано на широкий круг пользователей. Начинающим водителям он станет верным помощником и поможет адаптироваться к режиму сдачи теоретического экзамена.
Автобан
“Автобан” представляет собой аркадные гонки, где игроку следует давить педаль газа в пол, ездить на максимуме возможностей своего авто и использовать всё своё мастерство, чтобы избегать аварий в самых непростых ситуациях на дороге.
Ключевые особенности “Автобана”:
- Упрощённое управление и физическая модель;
- 3 режима игры: обычный, недостаточная видимость, внезапная смерть;
- Изменяемый уровень сложности;
- Специальные кольцевые трассы с интенсивным трафиком;
- Отслеживание выполняемых манёвров и начисление очков;
- Визуальные повреждения автомобилей при столкновении.
Нравится? Поделись!
Как и где можно оплатить штраф ГАИ
На сегодняшний день, вероятно не найти ни одного автолюбителя, которому не приходилось бы оплачивать штрафы нарушения правил дорожного движения. В данной статье мы не станем рассматривать как уклониться от оплаты, но мы подробно рассмотрим варианты, как можно заплатить по штрафу с минимальными усилиями и максимальным удобством. И так, перейдем к рассмотрению способов:Оплата штрафа ПДД с помощью Сбербанка России
Самый простой, или самый привычный спсоб — это заплатить по квитанции через кассу Сбербанка России. Однако, его нельзя назвать быстрым. Перед оплатой придется взять в отделении ГИБДД специальную квитанцию, в которой придется заполнить множество пунктов с личной информацией и суммой оплаты. Только после этого, можно отправиться в ближайшее отделение банка и заплатить в нем (можно провести оплату в любом банке, но необходимо внимательно смотреть на взимаемые комиссии, которые могут достигать больших сумм). Также, можно столкнуться с тем, что придется прождать своей очереди для обслуживания в кассе. После проведения оплаты, необходимо будет сохранить половину квитанции и чек о проведенной операции.
Через Терминал Сбербанка
На сегодняшний день, терминалами оплаты уже никого не удивишь. При этом, многие банки предлагают собственные терминалы в своих отделениях и в других общественных местах. Дело в том, что данные терминалы имеют много полезных функций, одной из которых является специальное меню оплаты штрафов ПДД. Нажав на необходимую кнопку, необходимо будет ввести свои данные и данные с протокола, а затем провести оплату без комиссии и очереди. Данный способ отнимает минимум времени, но личное присутствие, тем не менее, необходимо.
Оплата с помощью интернет банка Сбербанка России
Для тех, кто зарегистрировался в системе интернет банкинга от Сбербанка россии — повезло вдвойне. При использовании онлай-доступа к своему счету, даже не придется выходить из дома, что бы оплатить штраф, как и в терминале, в интерфейсе интернет банка есть специальное меню для оплаты штрафов ГИБДД.
Оплата штрафов ГИБДД при помощи сайта ГосУслуг
Данная оплата доступна всем гражданам российской Федерации. Но прежде чем продолжить, можно сказать, что прогресс не стоит на месте, и даже в России уже можно провести оплату за коммунальные платежи и так далее через интернет ресурсы, а самое верное решение — это воспользоваться официальным государственным интернет порталом. Для оплаты придется ввести данные своего водительского удостоверения, личные данные и выбрать подходящий способ оплаты (банковской картой, интернет деньгами, денежными переводами и т. д.)
Оплата штрафов при помощи кошельков электронных денег
Для тех, кто активно пользуется интернет кошельками электронных денег, совсем не составит труда оплатить любой штраф. На сегодняшний день, данную услугу предоставляют все популярные системы электронных денег: QIWI, Яндекс.Деньги, Webmoney и т. д. Для этого потребуется выбрать пункт «Товары и услуги», и найти меню «Оплата штрфов ГИБДД». При этом, вся процедура займет не более 5 минут.
Приложения для оплаты с мобильных телефонов
Сегодня, как для телефонов под управлением Android, так и для гаджетов с iOS, доступно несколько специальных приложений, которые позволяют круглосуточно следить за состоянием штрафов и проводить оплату любым удобным способом. Для поиска и установки приложения, необходимо в поисковой строке ввести «Проверка и оплата штрафов».
Оплата при помощи специальных интернет ресурсов
Также, в современном сегменте русского интернета присутствуют специальные интернет порталы, предоставляющие многие услуги по комфортному слежению за штрафами, безопасным платежам, контролю появления новых и оповещении на мобильный телефон о том, появилась ли в базе информация об уплате штрафа. Один из примеров таких сервисов, которые позволяют оплатить штраф ГИБДД онлайн — https://shtrafi.online/.
Вывод
На сегодняшний день, провести оплату по различным штрафам, в том числе и за нарушения правил дорожного движения — не составит труда. Для этого создано множество условий. И стоит напомнить, что если заплатить в течение 20 дней с момента получения протокола, то предоставляется скидка в размере 50%.
Скидка предоставляется согласно Федеральному закону от 22.12.2014 No 437-ФЗ «О внесении изменений в Кодекс Российской Федерации об административных правонарушениях в части совершенствования взыскания штрафов за административные правонарушения в области дорожного движения». Под действие закона не попадают административные правонарушения, предусмотренные статьями: 12.1 часть 1; 12.8; 12.9 части 6 и 7; 12.12 часть 3; 12.15 часть 5; 12.16 часть 3; 12.24; 12.26; 12.27 часть 3.
Кроме этого, можно уточнить, что некоторые сервисы взимают небольшую комиссию до 3%. Но лучше всего — ездить не нарушая правил дорожного движения, и затем не придется искать способы оплаты штрафов.
Автор: Готовчик Дмитрий
Автоматический контроллер сигналов дорожного движения с использованием нечеткой логики
Аннотация
Поскольку количество участников дорожного движения постоянно увеличивается, а ресурсы ограничены, интеллектуальный контроллер сигналов дорожного движения является очень важным требованием. Следовательно, возникает необходимость в моделировании и оптимизации алгоритмов управления трафиком, чтобы лучше удовлетворить этот растущий спрос. Однако существуют некоторые ограничения на использование интеллектуального управления трафиком. Например, предотвращение пробок выгодно как для окружающей среды, так и для экономики, так как уменьшение задержек, количества остановок, расхода топлива, выбросов загрязняющих веществ и т. Д., но улучшение транспортного потока может также привести к увеличению спроса. Оптимизация переключения светофора увеличивает пропускную способность дороги и транспортный поток, а также может предотвратить заторы на дорогах. Нечеткий контроллер будет регулярно опрашивать условия трафика, чтобы решить, продлить или прервать текущую фазу. В работе показано, что замена традиционной системы управления трафиком на нечеткую систему управления трафиком может значительно сократить задержку из-за скопления транспорта.
Ключевые слова
Время задержки оптимизации контроллера трафикаЭто предварительный просмотр содержимого подписки,
войдите в систему, чтобы проверить доступ.
Предварительный просмотр
Невозможно отобразить предварительный просмотр. Скачать превью PDF.
Ссылки
1.
2.
Санкар, Г., Кумар Саравана, С.: Автоматическая тормозная система на основе нечеткой логики в поездах. В: IEEE Region 10 Conference on TENCON 2006, pp. 1–4 (2006)
Google Scholar3.
4.
Роберт Х., Ульрих Дж .: Нечеткое управление светофором. В: Международная конференция IEEE по нечетким системам, т.3, pp. 1526–1531 (2007)
Google Scholar
Информация об авторских правах
© Springer-Verlag Berlin Heidelberg 2011
Авторы и филиалы
- 1. Технологический университет Дели, Нью-Дели, Индия
Портативные дорожные сигналы | Системы управления движением | StreetSmartRental.com
РАСШИРЕННЫЙ ДИСТАНЦИОННЫЙ МОНИТОРИНГ (ARM)
Система ARM отправляет текстовые сообщения и оповещения по электронной почте, сообщая о состоянии сигнала и работе. Напряжение аккумулятора, местонахождение сигнала и отчет о состоянии неисправности в режиме реального времени или по запросу с нашего специализированного веб-сайта для мониторинга.
ТРАНСПОРТНЫЙ ПРИЦЕП
Обеспечивает удобное хранение и переносимость всего набора сигналов SQ2. Расширенное хранилище означает, что вы также можете хранить солнечные батареи, выносные опоры и другое оборудование для рабочей зоны вместе с вашей сигнальной системой.
СОЛНЕЧНЫЙ ПАКЕТ И АУТРИГГЕР
Добавление 130-ваттной солнечной панели значительно увеличивает время автономной работы вашего сигнала SQ2, а выносные опоры обеспечивают дополнительную устойчивость тележки на неровных поверхностях.
СИГНАЛ ИЗМЕРИТЕЛЯ РАМПЫ
Сигнал временного измерителя рампы обеспечивает быстрое и надежное решение проблемы заторов на автомагистралях. Систему можно быстро развернуть на любом съезде с автомагистрали, чтобы регулировать поток транспорта на шоссе и уменьшить заторы в целом.
ПУЛЬТ ДИСТАНЦИОННОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
Легко разместите вызов зеленого цвета на любом конце рабочей зоны или оставьте оба сигнала двухфазной работы красным. Запрограммированные красные интервалы зазоров всегда вставляются между зелеными индикаторами, предотвращая возможность конфликта.
БЕСПРОВОДНЫЙ ПУЛЬТ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
Беспроводной пульт дистанционного управления на расстоянии до 1/2 мили является наиболее удобным методом ручного управления сигналом. Встроенная функция вибрации работает как подтверждение каждого нажатия кнопки, а сигналы переключаются обратно в автоматический режим одним нажатием.
PILOT CAR
Модуль Pilot Car (Flagger) позволяет водителю пилотного автомобиля дистанционно управлять сигнальной системой Horizon с помощью ручного передатчика для простой работы в течение всего дня.
УСТРОЙСТВО ПОМОЩИ ВОДИТЕЛЮ
Предупреждает автомобилистов на подъездных путях к жилым домам о направлении движения транспорта в однополосной рабочей зоне с двусторонним движением. Это помогает снизить вероятность неправильного вождения в рабочих зонах.
Автоматизированная интеллектуальная система управления движением в реальном времени для умных городов с использованием беспроводных сенсорных сетей
С годами количество транспортных средств резко увеличилось, что привело к серьезным проблемам, таким как пробки, аварии и многие другие проблемы, например, города превращаются в умные города.В последние годы пробки стали одной из основных проблем для инженеров и проектировщиков при создании интеллектуальной системы управления дорожным движением, способной эффективно обнаруживать и снижать общую плотность движения в большинстве городских районов, посещаемых автомобилистами, таких как офисы, центр города и учреждения. основан на нескольких современных технологиях, включая беспроводные сенсорные сети (WSN), камеры наблюдения и Интернет вещей. В этой статье мы предлагаем интеллектуальную систему управления дорожным движением, основанную на конструкции беспроводной сенсорной сети (WSN), для сбора данных о дорожном движении, а также о доступных парковочных местах в умном городе.Кроме того, предлагаемая система имеет инновационные сервисы, которые позволяют водителям удаленно просматривать скорость движения и количество доступных парковочных мест до места назначения с помощью мобильного приложения Android, чтобы избежать пробок и выбрать другой альтернативный маршрут, чтобы избежать застревания, а также облегчить водителям поиск свободного места для парковки, чтобы избежать ненужных поездок. Наша система объединяет три интеллектуальные подсистемы, подключенные друг к другу (управление перекрестками, управление парковочными местами и мобильное приложение), чтобы подключить жителей к умному городу.
1. Введение
Сегодня люди проводят большую часть своего времени вне дома, они ежедневно ездят на работу, часто ходят в торговые центры и достопримечательности, не забывая о перемещении в центр города. Это определенно вызвало дисбаланс в повседневной мобильности, что привело к развитию парковочных служб, чтобы избежать ненужных поездок по центру города в поисках места для парковки. Это, с одной стороны, вызывает дополнительные выбросы углекислого газа и наносит ущерб окружающей среде экосистемы города.С другой стороны, это увеличивает разочарование водителя и увеличивает пробку в городе, что, безусловно, приводит к дорожно-транспортным происшествиям.
В последнее время города растут в геометрической прогрессии из-за меняющейся глобальной экономики и современной жизни. Информационные и коммуникационные технологии играют решающую роль в планах устойчивого развития и городского развития городов. Новые технологии и различные интеллектуальные устройства, подключенные к сети (Интернет вещей или IoT), предоставляют современные и надежные решения с целью создания умных городов и оптимизации эффективности городских операций и услуг, связанных с гражданами [1].Умные города используются во всех сферах жизни, включая медицинские учреждения, промышленность, больницы, офисы, транспорт и автостоянки [2–4]. За последние пять лет количество транспортных средств устрашающе увеличилось, что вызвало несколько серьезных проблем для развития городов, вызвав пробки, аварии и даже болезни из-за разочарования и стресса водителей. Эти проблемы возникают, с одной стороны, из-за плохого управления дорожным движением в городах, особенно на перекрестках дорог, основанных на традиционных системах управления светофорами, и, с другой стороны, из-за ненужного передвижения водителей при поиске бесплатных парковочных мест в перегруженные автомобили, которые только увеличивают движение на дорогах.В этой статье мы представим интеллектуальную и подключенную систему, основанную на развертывании и внедрении беспроводных сенсорных сетей (WSN) на перекрестках дорог, а также на автостоянках, чтобы сделать дороги и города умнее. Эта система отличается от существующих систем, потому что она объединяет две интеллектуальные системы (систему управления светофорами и интеллектуальную систему парковки) в единую инновационную систему, чтобы подключать граждан к дорогам и парковочным местам в их городе удаленно и в режиме реального времени с использованием только одно мобильное приложение (рисунок 1).
Остальная часть этого документа организована следующим образом. Соответствующая работа представлена в разделе 2. В разделе 3 мы описываем общую архитектуру предлагаемой интеллектуальной системы управления дорожным движением. Описание нашей системы и предложение протокола самоорганизации представлены в разделе 4. Раздел 5 представляет алгоритм нашей интеллектуальной системы. Моделирование и оценка характеристик с точки зрения энергопотребления, срока службы WSN и т. Д.представлены в Разделе 6. Раздел 7 представляет наше мобильное приложение Android Smart Traffic. Наконец, раздел 8 — это заключение.
2. Связанные работы
В последние годы было реализовано несколько систем управления дорожным движением с использованием различных технологий связи и наблюдения для контроля и управления проблемами городского движения в городах и устранения ограничений традиционных систем светофоров.
Авторы [5] предлагают новую архитектуру системы управления городским движением (S1) на основе сети IoT.Эта система позволяет подключать дороги к Интернету через сенсорные узлы, способные обнаруживать прибытие транспортных средств и отправлять обнаруженные данные в облако с пограничного маршрутизатора. Данные, собранные в облаке, позволяют промежуточному программному обеспечению определять будущее состояние светофоров. Это решение передается через сеть исполнительным механизмам, установленным на светофорах для управления движением на городских перекрестках. Эта система основана на реализации протокола самоорганизации, который создает звездообразную топологию сети, позволяющую всем узлам обнаружения отправлять свои данные в узел-приемник через один переход.Однако этот протокол не подходит для управления линейными автостоянками и для больших автостоянок, потому что он создаст дисбаланс нагрузки между различными узлами обнаружения во время связи одного перехода к узлу-приемнику, быстро истощая самые удаленные узлы, которые будут негативно сказываются на качестве связи и надежности системы. Кроме того, этот подход использует новейшие технологии, такие как беспроводные датчики, чтобы ограничить стоимость развертывания системы. Однако такое решение остается устаревшим для граждан и водителей, поскольку они не могут подключаться к дорогам и узнавать состояние дорожного движения в режиме реального времени и удаленно, что является частью концепции создания умных городов.
В [6] представлена новая интеллектуальная система управления дорожным движением (S2), которая основана на развертывании сетей беспроводных датчиков на дорогах, на светофорах и в определенных местах (например, в больницах и заправочных станциях) по порядку. отслеживать дорожное движение в городе и находить кратчайший маршрут до пункта назначения по времени и расстоянию, избегая пробок. Эта система использует интеллектуальные камеры на дорогах для определения номеров автомобилей и отправки этой информации в центральную систему для наблюдения за автомобилями в городе.В предлагаемой системе используются новейшие технологии, которые позволяют объединять различные городские службы между собой, создавая «умный город». Однако развертывание интеллектуальных камер может быть дорогостоящим, а также менее эффективным, особенно при обнаружении количества автомобилей в случаях, когда есть проблемы с видимостью, такие как отражение света от автомобильных фар, учитывая, что есть другие более дешевые и эффективные решения, такие как Технология RFID, которая взаимодействует с сетями WSN и позволяет транспортным средствам отправлять эту информацию в центральную систему устойчивым и эффективным способом.
В [7] авторы предлагают интеллектуальное управление заторами на дорогах (S3), основанное на развертывании беспроводных сенсорных сетей для измерения плотности дорожных заторов, возникающих на пересечениях дорог. Эта система состоит из двух модулей. Первый — это TDMM (модуль мониторинга плотности трафика), который использует ультразвуковой датчик для измерения длины очереди, созданной скоплением автомобилей, а второй — TMM (модуль управления трафиком), который представляет собой программное обеспечение, развернутое на компьютере, которое делает возможным для управления светофором в соответствии с данными, собранными различными TDMM, внедренными на дорогах.TDMM, развернутый на каждой дороге на пересечении дорог, отправляет свои собранные данные в ближайший TMM через Wi-Fi, используя многозвенную или односкачковую связь в зависимости от дальности связи, чтобы определить плотность дорожных заторов (сильная, средняя или низкая. ) и динамически определять время работы светофоров в соответствии со значениями, полученными на разных маршрутах. Эта система использует протокол самоорганизации, который создает неавтономную топологию древовидного типа между различными узлами, из которых каждый узел мониторинга связывается через один переход с ближайшим узлом, который, в свою очередь, обменивается данными с узлом-приемником через промежуточные узлы для передачи данных на модуль управления трафиком.Однако неавтономная древовидная структура, сформированная этой системой, создает дисбаланс в энергопотреблении между различными узлами мониторинга, особенно для промежуточных узлов, а также снижает качество доставки данных в центральный узел, когда один из узлов маршрутизации становится неисправен или истощен по энергии. Кроме того, ультразвуковые датчики следует использовать только на дорогах с небольшой проходимостью и умеренным движением. Обнаружение автомобилей на нескольких полосах движения с помощью придорожных ультразвуковых датчиков может снизить точность обнаружения в условиях интенсивного движения.Это может вызвать проблемы со стабильностью системы, особенно в часы пик с интенсивным движением, что может привести к неправильным решениям при оценке времени работы светофоров.
В [8] предлагается система мониторинга дорожного движения (S4) на базе мобильных устройств и Bluetooth-маяков с низким энергопотреблением. Обнаружение транспортных средств, предлагаемое этой системой, использует мобильные устройства (например, смартфоны), установленные на обочине дороги, для измерения мощности сигнала RSSI при приеме радиочастотных кадров, излучаемых маяками Bluetooth на другой стороне улицы.Радиомаяки Bluetooth устанавливаются вдоль дороги на разной высоте, чтобы идентифицировать и классифицировать тип транспортных средств, движущихся по дороге (легковые или грузовые). Значения RSSI, обнаруженные мобильными устройствами на каждом маршруте, а также их положения отправляются через сотовую сеть или соединение Wi-Fi на сервер для измерения плотности дорожных заторов и отслеживания движения на дорогах. С другой стороны, технология Bluetooth может вызвать серьезные проблемы с синхронизацией и сбои связи между маяком BLE и смартфоном, что отрицательно сказывается на работоспособности системы, особенно в случае интенсивного трафика.Таким образом, агент должен быть на месте, чтобы соединить два устройства для возобновления связи.
Авторы в [9] представляют новую интеллектуальную систему мониторинга трафика и управления светофорами (S5) на основе беспроводных сенсорных сетей. Эти сенсорные узлы устанавливаются вдоль дорог, образующих перекресток дорог. Данные, захваченные датчиками, отправляются контроллеру двух сигналов светофора для оценки загруженности дорожного движения на каждой дороге на перекрестке и прогнозирования состояния пробок.Эта система использует протокол самоорганизации (Alg5), который создает звездообразную топологию между различными узлами сети. Однако алгоритм, принятый этой системой, создаст темные области для определенных узлов вдали от связанного с ними центрального узла, с которыми они не смогут взаимодействовать, и что приведет к ухудшению качества и выполнимости этой системы. Это решение позволяет динамически управлять светофорами в соответствии с состояниями загруженности, полученными на перекрестке, а также дает возможность оптимизировать фазу синхронизации управления светофорами, чтобы избежать пробок до их образования.Интеллект этой системы остается вне досягаемости водителей и граждан, поскольку они не взаимодействуют с удаленной системой, а также не подключаются к дорогам в режиме реального времени.
Авторы в [10] описывают новую интеллектуальную систему адаптивного управления светофорами (S6), основанную на развертывании беспроводной сенсорной сети (WSN) на проезжей части, ведущей к перекрестку. Эти узлы представляют собой магнитные датчики, установленные в земле вдоль всех путей, образующих перекресток. Эти датчики образуют сетевую топологию кластерного типа, в которой каждый узел определяет присутствие транспортных средств и отправляет данные в ближайший головной кластер для достижения базовой станции.Данные, собранные WSN, используются базовой станцией путем запуска алгоритма для определения скорости заторов на каждой полосе движения и динамического управления светофором на перекрестке дорог. La Transmission des Données à la station de base par les nœuds capteurs est basée sur l’utilisation d’un protocole d’auto-organization qui permet à tous les nœuds du réseau de бывшая топология в кластере dont les têtes de cluster (CH) transmettent toutes les données de leur cluster à la station de base via un seul saut.Cependant, ce protocole crée un déséquilibre de charge entre specific nœuds de capteurs qui sont élus en tant que cluster de têtes et qui sont éloignés de la station de base car la communication d’un seul bond vers la station de base consomme beaucoup d’énergie ce qui provoque un épuicing rapide de ces nœuds. В этой системе используются новейшие интеллектуальные и недорогие технологии для отслеживания пробок на дорогах и управления светофорами. Однако такое решение для создания умного города и подключения к горожанам остается изолированным от водителей, которые игнорируют то, что происходит на дорогах их города.
3. Архитектура интеллектуальной системы управления движением
Предлагаемая система состоит из 3 основных частей: центр управления парковочными местами, центр управления светофорами и глобальный центр информации и управления (рисунок 1).
Центр управления парковочными местами основан на развертывании WSN на всех парковочных местах, чтобы объединить все состояния доступности пространств в каждой зоне города для тех, которые отправлены на соответствующий шлюз (приемник), и затем они будут переданы в глобальный центр информации и управления для использования водителями и гражданами.Используемые сенсорные узлы представляют собой гибридные датчики (датчик присутствия + считыватели RFID), которые позволяют, с одной стороны, обнаруживать присутствие транспортных средств, а с другой стороны, идентифицировать транспортное средство по его регистрационному номеру, указанному в его метке RFID (Рисунок 2). . В случае гибридных датчиков, обнаруживающих присутствие автомобиля без какой-либо RFID-метки, система сообщает агенту по парковке, чтобы он ввел регистрационный номер автомобиля, припаркованного в системе.
Центр управления светофорами отвечает за управление и контроль светофоров на перекрестках дорог, чтобы минимизировать заторы и обеспечить движение транспорта в городе.Этот центр основан на реализации сенсорных сетей для сбора данных о плотности и количестве автомобилей, движущихся по каждой дороге, образующей перекресток, с целью принятия решения при оценке максимальной продолжительности, в течение которой светофор может оставаться зеленым. Этот центр основан на инновационных и надежных расчетах, которые делают нашу систему управления дорожным движением более эффективной и производительной (см. Раздел 5.2).
Глобальный центр информации и управления — это база данных всей информации, собранной со всех датчиков, установленных в городе, которая обеспечивает общий обзор доступных парковочных мест и управляет светофорами для увеличения транспортного потока в городе.Этот центр предоставляет водителям мобильное приложение для Android, которое определяет бесплатные парковочные места для их пунктов назначения, а также скорость движения в режиме реального времени, чтобы избежать ненужных поездок и искать другой альтернативный маршрут и другие места, доступные в местах, близких к их пунктам назначения, чтобы избежать застревание в пробке и увеличение пробок в городе.
4. Обзор системы
4.1. Типы датчиков
Предлагаемая система использует узлы датчиков для обнаружения присутствия транспортных средств и отправки состояний обнаружения на соответствующий шлюз для передачи их в глобальный центр информации и управления.Для обнаружения транспортных средств в некоторых системах используются датчики разных типов, магнитные датчики, ультразвуковые датчики, датчики света и т. Д. Но в большинстве систем используются магнитные датчики, установленные в земле по простой причине: автомобиль содержит более 100 магнитных датчиков. части, из которых эти датчики могут измерять генерируемые магнитные поля и с высокой точностью обнаруживать присутствие автомобиля. В таблице 1 представлено сравнение трех наиболее часто используемых типов датчиков.
| ||||||||||||||||||||||||||||
4.2. Беспроводная связь
Для лучшего управления парковочными местами и управления движением в городе выбор технологии беспроводной связи важен для получения хороших результатов надежности и эффективности системы при обмене данными между различными датчиками и шлюзом.На беспроводную связь между датчиками влияют несколько основных факторов: автомобили, их шум, внешние помехи и т. Д. Наиболее распространенными технологиями беспроводной связи, используемыми для сетей датчиков, являются Bluetooth, Wi-Fi и ZigBee.
В этом типе приложений большое количество систем мониторинга и управления, основанных на сенсорных сетях, использовалось стандартами Bluetooth и ZigBee. Bluetooth — это технология радиосвязи на короткие расстояния, предназначенная для упрощения связи и взаимосвязи между датчиками, которая позволяет передавать данные с низкой скоростью и на короткие расстояния.С другой стороны, эта технология имеет серьезный недостаток, который проявляется в ее слишком большом потреблении энергии и поэтому не может быть адаптирован к датчикам, которые питаются от батареи и которые должны работать в течение нескольких лет. С другой стороны, стандарт ZigBee, несмотря на низкую скорость передачи данных, предлагает характеристики, которые даже лучше соответствуют потребностям сенсорных сетей с точки зрения энергосбережения. Кроме того, эта технология предлагает достаточно высокую надежность и низкую стоимость, потребление энергии которой является критерием выбора [11, 12].
В таблице 2 показаны преимущества и ограничения ZigBee по сравнению с другими беспроводными технологиями.
| ||||||||||||||||||||||||||||||||||||||||||||||||
4.3. Топологии сети
Беспроводные сенсорные сети состоят из небольших сенсорных узлов, которые используют ограниченные энергетические ресурсы и низкую коммуникационную и вычислительную мощность для сбора информации в заданной географической области и передачи ее на шлюз (называемый приемником). Эти датчики представляют собой отдельные узлы, которые ничего не знают о сети, и у них нет существующей фиксированной инфраструктуры; они часто полностью децентрализованы. Таким образом, эти узлы должны самоорганизовываться, в отличие от обычных проводных сетей, автономно, чтобы сформировать топологию сети, чтобы они могли обмениваться данными и передавать обнаруженные данные в приемник.Прямая связь от сенсорного узла с BS или многозвенная связь от сенсорных узлов к BS нецелесообразна, поскольку потребление энергии велико, что приводит к преждевременному истечению срока действия сенсорных узлов и дублированию данных, а самые удаленные узлы быстро умирают. Чтобы преодолеть эти проблемы, используется двухуровневая связь с использованием подхода иерархической кластеризации, когда узлы сгруппированы в кластеры, а ведущий узел, называемый головкой кластера (CH), отвечает за агрегирование данных и затем передачу их на шлюз. .Связь внутри кластера и между кластерами осуществляется с одним переходом (внутри кластера) и с несколькими переходами (межкластерным), соответственно, как показано на рисунке 3. Методы, основанные на кластеризации, представляют собой иерархические методы, наиболее часто используемые в беспроводных сенсорных сетях [13–15].
В предлагаемой нами системе сенсорные узлы выполняют иерархический алгоритм самоорганизации, основанный на формировании кластера, путем создания топологии кластерного дерева [16]. Протокол состоит из трех этапов: (1) сбор позиций узлов и формирование кластера, (2) выбор головок кластеров (CH) и (3) сбор и передача данных.
4.3.1. Сбор позиций узлов и формирование кластера
На этом этапе сенсорная сеть делится на несколько уровней локализации (уровень 1, уровень 2 и т. Д.) До достижения всех узлов сети. Создание уровней локализации выполняется прогрессивным и рекурсивным способом, при котором BS отвечает за обучение первого уровня (уровень 1). BS отправляет сообщение HELLO ближайшим узлам, чтобы сообщить свои позиции. Как только BS получает позиции этих узлов, она начинает разделять этот первый уровень на несколько секций (кластеров) на основе углового значения каждого узла.БС рассчитывает для каждого узла первого уровня соответствующее ему угловое значение (рисунок 4).
Затем базовая станция начинает разделять первый уровень на кластеры, параметром которых является количество кластеров на каждом уровне локализации, используя формулу (1), из которой каждый узел получает сообщение Cluster_ADV (Node-Id, Level, Cluster -Id), который содержит идентификатор узла, уровень местоположения и идентификатор кластера, который является его частью. где — область, представленная интервалом угловых значений, который соответствует кластеру.
Чтобы сгруппировать позиции всех узлов, BS выбирает узел, наиболее удаленный от каждого кластера каждого уровня, как и узел ретрансляции, отправляя сообщение RelayNode_ADV_MSG (Node-Id, Level, Cluster-Id, Relay-Id) из который Relay-Id является идентификатором узла ретрансляции (Relay-Id — это BS для первого уровня). Каждый выбранный ретрансляционный узел будет играть роль BS, посылая широковещательное сообщение HELLO всем ближайшим узлам, чтобы они отправили свои позиции. Узлы, которые будут отправлять свои позиции, — это те, которые не являются частью какого-либо уровня локализации, а также не имеют кластера (это решение основано на силе принятого сигнала).Затем каждый узел ретрансляции каждого кластера соберет все позиции, полученные от более высокого уровня местоположения, и отправит их на свой Relay-Id для передачи в BS. Как только BS получает новые позиции узлов ретрансляции, она запускает тот же процесс рекурсивным способом, отправляя два сообщения Cluster_ADV (Node-Id, Level, Cluster-Id) и RelayNode_ADV_MSG (Node-Id, Level, Cluster-Id, Relay-Id) к новым узлам со значением уровня местоположения, которое будет увеличиваться, и со значением кластера, которое будет таким же, как у их узла ретрансляции.На рисунке 5 показан обмен различными сообщениями, а на рисунке 6 представлен общий обзор рекурсивного алгоритма, используемого для минимизации энергопотребления и повышения надежности узлов во время сбора всех положений этих узлов базовой станцией.
На рисунке 7 показан пример формирования уровней локализации, а также формирования кластеров в беспроводной сенсорной сети со значением, равным 3.
4.3.2. Выбор заголовка кластера
После создания кластеров и уровней расположения несколько узлов-кандидатов соревнуются за право быть выбранными в качестве заголовков кластера для текущего раунда.На этом этапе каждый узел рассылает сообщение в своем кластере, содержащее его местоположение. Каждый узел, получающий это сообщение, обновляет свою таблицу соседства, которая содержит расстояние до его соседей и количество соседей, и вычисляет свой вес в соответствии с формулой (2). После расчета веса каждый узел соревнуется за то, чтобы быть выбранным столько же, сколько CH на следующем ходу, если его вес превышает определенный порог, указанный в формуле (3). где — расчетная текущая остаточная энергия узла, — расстояние между узлом и узлом, и — количество соседей узла.где — процентное соотношение голов кластера ко всем узлам, — это выбранное круглое число, обозначает количество выбранных головных узлов кластера перед этим циклом, и — это группа узлов, которые ранее не были выбраны в качестве головных узлов кластера [17].
В каждом кластере узлы-кандидаты обмениваются между собой своим весом, и узел с наибольшим весом выбирается в качестве CH в своем кластере на текущий раунд. Некандидатные узлы переходят в спящий режим, чтобы минимизировать энергопотребление, ожидая получения сообщения Cluster_Head_ADV_MSG от узла CH, чтобы начать передачу данных.
Выбор CH не производится периодически в каждом раунде. Во время фазы выбора каналов каждый узел CH проверяет значение своего веса, если оно ниже порогового значения. В этом случае процесс выбора нового канала начинается с отправки сообщения Selection_Cluster Head_MSG (рисунок 8). В противном случае узел остается столько же, сколько CH в следующем раунде, чтобы не допустить, чтобы узлы потребляли больше энергии во время процесса выбора CHS, и чтобы сбалансировать нагрузку между различными узлами в следующих раундах.Выбор нового канала в каждом кластере выполняется независимо от остальных кластеров на каждом уровне расположения.
4.3.3. Передача данных
После выбора каналов начинается процесс передачи данных на базовую станцию. На основе протокола TDMA связь инициируется между различными узлами каждого кластера и их соответствующими CH в их соответствующих временных интервалах. Каналы CH объединяют собранные данные и передают их промежуточному узлу CH или BS в соответствии с уровнем местоположения.Чтобы максимизировать уровни энергии узлов, мы разработали энергоэффективную многозвенную связь при передаче межкластерных данных на базовую станцию с учетом остаточной энергии и расстояний от соседних узлов CH и базовой станции.
Для первого уровня местоположения все узлы находятся рядом с базовой станцией, включая каналы CH. По этой причине и для того, чтобы снизить энергопотребление этих узлов, мы должны использовать однопроходную связь с базовой станцией для первого уровня, как показано на рисунке 9.
Для других уровней местоположения существует несколько маршрутов между соседними CH и базовой станцией с использованием межкластерной связи с множеством переключений. Процесс выбора оптимальных маршрутов между различными CH и BS начинается с каналов CH первого уровня местоположения. Каждый выбранный на втором этапе передает сообщение nexthop_ClusterHead_MSG, содержащее остаточную энергию, совокупное расстояние его маршрута до базовой станции, его идентификатор CH-Id, его местоположение, его уровень местоположения и идентификацию его кластера Cluster-Id.Каждый узел верхнего уровня, получающий это сообщение, обновляет свою таблицу соседства каналов CH и вычисляет каждого соседа в соответствии с формулой (4). Каждый узел выбирает соседний узел с наибольшим весом, принадлежащим нижнему уровню местоположения, в качестве следующего перехода для передачи собранных данных на базовую станцию. где обозначает расчетную текущую остаточную энергию, является максимальной энергией для всех узлов, является совокупным расстоянием между узлом и базовой станцией и является расстоянием между узлом и узлом.
Этот процесс выбора оптимальных путей данных повторяется на всех уровнях сетевого расположения (рисунок 10). На рисунке 11 показаны этапы построения оптимального маршрута и передачи данных между каналами.
На рисунке 12 показан пример, в котором канал CH 22 заполняет свою таблицу соседства каналами CH после приема сообщений nexthop_ClusterHead_MSG от разных соседних каналов CH (1, 8 и 27). Канал 22 удаляет маршрут к базовой станции, проходящий через канал 27, потому что он принадлежит к тому же уровню, и выбирает оптимальный маршрут, проходящий через канал 1, который принадлежит нижнему уровню и чей вес больше, чем у канала 8.
При передаче данных ближайшие к базовой станции каналы будут потреблять больше энергии по сравнению с другими. Затем у него будет новый выбор новых каналов в каждом кластере независимым образом в соответствии с фазой выбора канала. Для каждой вновь выбранной головки кластера он отправляет широковещательное сообщение New_nexthop_ClusterHead_MSG, содержащее остаточную энергию, его CH-Id, его местоположение, его уровень местоположения и идентификацию его кластера Cluster-Id. Каждый узел, получающий это сообщение и принадлежащий к более высокому уровню, изменяет свою таблицу соседства в соответствии с уровнем местоположения и Cluster-Id нового выбранного канала, чтобы сделать новый выбор нового оптимального маршрута к базовой станции, как показано на рисунке 13. .Для каналов нижнего уровня, принимающих то же сообщение, они снова отправляют сообщение nexthop_ClusterHead_MSG новому каналу, чтобы он мог пополнить свою таблицу соседей и выбрать следующий переход как лучший маршрут к базовой станции.
4.4. Данные, отправляемые узлами датчиков
Наша система управления дорожным движением содержит два типа узлов датчиков: гибридные узлы, которые обнаруживают занятые парковочные места, и узлы, определяющие плотность дорожного движения на каждой полосе. Эти узлы полагаются на топологию сети кластерного дерева для отправки своих пакетов данных для достижения шлюза.Перед отправкой пакетов данных каждый тип датчика подготавливает обнаруженные данные для отправки их в соответствующий канал (рисунок 14).
На рисунке 15 показаны разные пакеты, отправленные разными узлами предлагаемой системы.
После того, как пакеты данных отправляются различными датчиками, шлюз собирает все данные, собранные на соответствующем переходе дороги, и передает их в глобальный центр информации и управления системы, чтобы обновить информацию, доступную для водителей и также для лучшего и эффективного управления и контроля светофоров в режиме реального времени.Центр управления организует все данные, отправляемые каждым шлюзом на каждом пересечении дорог, в форме заданной базы данных, чтобы упростить мониторинг парковочных мест, а также контролировать плотность движения на полосах, образующих каждый перекресток. На рисунке 16 показан пример ситуации пересечения полосы 2 из пакетов, отправленных шлюзом.
5. Предлагаемый алгоритм
Наша интеллектуальная система управления дорожным движением основана на внедрении и развертывании сенсорных сетей на каждом пересечении дорог для определения количества занятых парковочных мест на доступных стоянках, а также для определения трафика. плотность на путях, образующих этот перекресток, чтобы эффективно контролировать и управлять светофорами, соответствующими этому перекрестку.Чтобы контролировать наличие парковочных мест, система использует гибридные датчики для обнаружения присутствия транспортных средств на доступном пространстве, а также для идентификации припаркованного автомобиля по его регистрационному номеру, предоставленному меткой RFID. Эта система также использует датчики присутствия, установленные в полосах движения на каждом пересечении дорог, для определения плотности движения и управления светофорами для увеличения потока транспорта на этом пересечении. Наша система основана на развертывании топологии кластерной сети, так что различные типы датчиков, установленные на каждом перекрестке, могут отправлять свои данные в глобальный центр информации и управления системы с соответствующего шлюза, чтобы продлить срок службы системы. а также повысить отличную эффективность и осуществимость системы.
5.1. Поведение WSN
На каждом пересечении дороги датчики выполняют алгоритм самоорганизации, который позволяет создать топологию кластерного дерева между различными узлами датчиков, чтобы минимизировать потребление энергии и увеличить срок службы узлов из-за передачи прямо к шлюзу. В каждой сети, образованной в перекрестке, есть два типа датчиков. Первый отправляет статус парковочного места и регистрационный номер припаркованного автомобиля, а второй отправляет только состояние движения в соответствующей полосе этого перекрестка.Каждый из этих узлов играет определенную роль в сети: либо узел-член кластера, который будет отправлять только состояние обнаружения в его головку кластера, либо головной кластер, который затем будет выполнять агрегирование этих данных с полученными данными. узлами-членами своего кластера на следующий канал.
В каждом цикле и перед началом отправки данных каждый датчик проверяет данные, обнаруженные в текущем цикле, с данными, обнаруженными в предыдущем цикле. Если состояние обнаружения не изменилось между текущим раундом и предыдущим раундом, то узел экономит свою энергию во время этого раунда и не отправляет никаких данных, чтобы минимизировать потребление энергии при отправке ненужных и дублированных данных.Следующая блок-схема (рисунок 17) позволяет узлам отправлять пакеты данных в случае изменения состояния обнаружения.
Псевдокод, показанный в Псевдокоде 1, показывает поведение различных узлов датчиков на пересечении дорог.
| ||||||||||||||||||||||||||||||||||||||||||||||||
Каждый шлюз, установленный на пересечении дорог, отправляет все данные, собранные из соответствующего WSN, в глобальную информацию и управление nt center, чтобы использовать все данные и отправить их в центр управления парковочными местами, а также в центр управления светофорами.
5.2. Центр управления парковочными местами
Центр управления парковочными местами играет решающую роль в определении количества свободных мест на каждом пересечении дорог в городе. Этот центр получает отфильтрованные данные из глобального центра информации и управления в соответствии с типом датчиков, которые отправили обнаруженную информацию, то есть данные, отправленные узлами типа 1 (см. Раздел 4.4).
Когда автомобиль только что припарковался на свободном месте на бетонном переходе, соответствующий датчик, с одной стороны, обнаруживает присутствие автомобиля.С другой стороны, встроенный считыватель RFID считывает данные водителя с помощью RFID-метки, установленной в транспортном средстве, и передает их, объединяя их со статусом места в центр управления сиденьями. Данные, связанные с парковкой, будут использоваться при оплате времени парковки, а также для проверки наличия происшествий при парковке автомобиля. В случае автомобилей, не помеченных RFID, должностным лицам, ответственным за управление парковочными местами, отправляется сообщение с идентификатором перехода и парковочного места для ввода регистрационного номера транспортного средства в систему, чтобы гарантировать оплату парковки. сборы.Псевдокод, показанный в Псевдокоде 2, показывает управление парковочными местами на каждом пересечении дорог.
| ||||||||||||||||||||||||||||||||||||||||||
Оплата времени парковки производится онлайн с помощью мобильного приложения (см. раздел 7) или вручную с помощью автоматических парковочных машин, имеющихся в каждой полосе перекрестка.В обоих случаях необходимо ввести только регистрационный номер припаркованного транспортного средства, чтобы система могла обнаружить его в базе данных, а владелец транспортного средства мог произвести оплату.
5.3. Центр управления светофорами
Центр управления светофорами играет фундаментальную роль в управлении дорожным движением, вычисляя плотность движения на каждой полосе движения, образующей перекресток в городе. Этот центр использует отфильтрованные данные из глобального центра информации и управления в соответствии с типом датчиков, которые отправили обнаруженную информацию, то есть данные, отправленные узлами типа 2 (см. Раздел 4.4). Центр подсчитывает количество датчиков типа 2 в каждой полосе движения, которые зафиксировали наличие автомобилей в стабильном состоянии. Для узлов этого типа они выполняют блок-схему стабильности состояния обнаружения (рисунок 18) перед отправкой пакетов данных на шлюз, зная, что состояния, обнаруженные в состоянии трафика автомобилей, могут влиять на расчет плотности трафика, что может привести к принятию неверных решений. при оценке продолжительности включения зеленого света.
Расчет плотности дорог основан на расчете количества автомобилей, находящихся на каждой полосе движения на пересечении дорог, с учетом как входящего, так и исходящего трафика.На рисунке 19 показаны произведенные расчеты.
В зависимости от рассчитанной плотности движения центр управления светофорами примет решение при оценке продолжительности времени, в течение которого светофор может оставаться зеленым. Было проведено несколько исследований для определения и оценки времени до зеленого света. Между ними мы находим Келла и Фуллертона [18], которые предполагают, что максимальное время включения зеленого света должно составлять от 30 до 60 секунд. Оркатт [19] заметил, что максимальное время включения зеленого света должно быть достаточно продолжительным, чтобы позволить 1.В 3 раза больше средней длины очереди и минимизируйте циклы остановок и возобновлений. Courage et al. [20] указали, что максимальное время зеленого света не имело негативных последствий, если движение было слишком слабым. В [21] авторы предлагают более современные методы для фиксации согласованного максимального времени зеленого света, которые сложно определить из-за сложности и возможного разнообразия перекрестков. С одной стороны, авторы статьи [22] оценили время зеленого света динамически и поочередно в соответствии с плотностью трафика, рассчитанной в каждом из них с использованием камер видеонаблюдения и методов обработки видео.С другой стороны, предлагаемая нами система рассчитывает время зеленого света на основе плотности движения на каждой полосе, которая образует пересечение дороги, с учетом того факта, что эта продолжительность должна составлять от 30 до 60 секунд. На рисунке 20 показана предлагаемая продолжительность зеленого света.
После того, как время зеленого света рассчитано, центр управления светофорами распределяет приказы на светофоры на каждом пересечении дороги, чтобы увеличить транспортный поток и уменьшить заторы.
5.4. Глобальный центр информации и управления
Глобальный центр информации и управления распределяет пакеты данных, полученные от шлюза, в центр управления парковочными местами, а также в центр управления светофорами в соответствии с типом датчиков, отправивших пакет. Этот центр играет еще одну важную роль в предлагаемой нами интеллектуальной системе управления дорожным движением, которая заключается в сборе информации в реальном времени из этих двух центров, содержащей информацию о количестве пробок на каждом пересечении дорог и количестве парковочных мест, доступных для данного пункта назначения, а также обновите и сохраните их на сервере базы данных MySQL, чтобы подключить водителей и граждан к нашей системе через мобильное приложение Android, чтобы не застрять и не выбрать другой альтернативный маршрут.На рисунке 21 показана роль глобального центра информации и управления в предлагаемой интеллектуальной системе управления дорожным движением.
6. Моделирование и результаты
6.1. Платформа моделирования
Для моделирования нашего алгоритма мы использовали симулятор CupCarbon [2–25]. Это симулятор беспроводной сенсорной сети умного города и Интернета вещей (SCI-WSN). Его цель — разработать, визуализировать, отладить и проверить распределенные алгоритмы для мониторинга, сбора данных об окружающей среде и т. Д.и для визуализации рабочих концепций сенсорных сетей и их развертывания, а также может помочь ученым тестировать свои топологии, протоколы и т. д. по беспроводной сети [26]. На рисунке 22 представлен интерфейс CupCarbon, в котором наша сеть и наша интеллектуальная система управления трафиком реализованы на карте openstreet (Google Maps), а датчики развернуты в реальном городе (Кенитра, Марокко). Симулятор использует язык сценариев для кодирования распределенных алгоритмов под названием SenScript, который позволяет программировать и настраивать каждый узел датчика индивидуально.
Моделирование настроено следующим образом: (i) Есть два дорожных перехода (ii) Количество узлов для управления движением составляет 40 датчиков (iii) Количество узлов для мониторинга парковочных мест составляет 40 датчиков (iv) На каждом перекрестке развернут только один шлюз (v) На сенсорные узлы действуют ограничения по энергии; то есть они не являются перезаряжаемыми
Параметры, используемые в моделировании, представлены в таблице 3 и на рисунке 23.
| ||||||||||||||||||||
На рисунке 24 показана передача данных между узлами и их кластером (внутрикластерная связь), а на рисунке 25 агрегация и передача данных между CH к шлюзу с использованием топологии кластерного дерева (межкластерная связь).
Шлюз каждого перекрестка выполняет сценарий Sink.csc, который позволяет ему собирать все данные, полученные от всех узлов соответствующего перекрестка дороги, чтобы сохранить их в файл и отправить их в глобальную информацию. и центр управления. На рисунке 26 показаны данные, полученные шлюзом, в соответствии со структурой данных, используемой нашей интеллектуальной системой управления трафиком.
6.2. Результаты моделирования и анализ
Чтобы оценить производительность и качество обслуживания предлагаемой нами системы, мы смоделировали нашу систему в трех сценариях плотности трафика: 40%, 60% и 80%, и мы сравним его с существующим контролем трафика. системы, использующие следующие показатели производительности: потребление энергии, смерть первого узла (FND), время жизни сети (NL) и коэффициент доставки пакетов (PDR).
6.2.1. Энергопотребление
Энергопотребление — это количество энергии, потребляемой узлами по отношению к числу оборотов. Основная цель этого эксперимента — сравнить влияние плотности дорожного движения на энергопотребление всей сети. На рисунках 27–29 показаны экспериментальные результаты.
Во время 40% плотности трафика наша предлагаемая система потребляет меньше энергии в первых раундах, потому что состояния обнаружения датчиков быстро меняются в зависимости от количества автомобилей в движении.То есть только 40% датчиков отправят свои стабильные состояния обнаружения, которые потребляют энергию во время передачи данных. С другой стороны, другие системы не выполняют какой-либо алгоритм стабильности, и отсутствует процесс проверки состояний обнаружения датчиков, что приводит к передаче бесполезных и дублированных данных в каждом цикле, что увеличивает потребление энергии и быстрое истощение этих узлов и WSN.
При 60% плотности трафика наша система потребляет больше энергии по сравнению с 40% плотности трафика; это связано с увеличением количества автомобилей в обращении, что приводит к отправке большего количества данных в сети.Для других систем потребление энергии не меняется, поскольку узлы датчиков, используемые в этих системах, отправляют данные во время каждого раунда.
С другой стороны, при 80% плотности движения наша система потребляет значительное количество энергии на первых этапах, потому что по городским дорогам движется большое количество автомобилей. Но в последних раундах мы наблюдаем стабильность энергопотребления в сети, потому что состояния обнаружения наших датчиков не изменились из-за высокой скорости заторов на дорогах и меньшего автомобильного движения.
6.2.2. Смерть первого узла (FND) и время жизни сети (NL)
Мы представляем время жизни сети на основе двух основных показателей. Первый — это время до смерти первого узла (FND). Продолжительность FND считается периодом стабильности для сети, поскольку узел становится мертвым в течение этого периода. Второй — это общий срок службы сети, который представляет собой время, в течение которого больше нет узла для продолжения связи; это время называется сетевой жизнью (NL). Результат, показанный на рисунках 30–32, касается срока службы сети.
На трех иллюстрациях мы видим, что предлагаемая нами система увеличивает срок службы сети за счет развертывания эффективной и действенной топологии сети, которая адаптируется к изменению плотности существующего трафика на дорогах. , что позволяет ей быть интеллектуальной и инновационной системой. С другой стороны, другие существующие системы используют простые и стандартные алгоритмы, которые позволяют получать такие же плохие результаты срока службы сети в различных сценариях плотности трафика в городе.
6.2.3. Коэффициент доставки пакетов (PDR)
Коэффициент доставки пакетов — это отношение количества пакетов, успешно доставленных адресату, к общему количеству пакетов, отправленных источником (формула (5)). Эта метрика указывает на устойчивость и надежность протокола. Следовательно, высокая скорость доставки пакетов указывает на лучшую производительность протокола. На рисунках 33–35 показаны экспериментальные результаты.
Согласно 3 иллюстрациям, мы видим, что наша система обеспечивает значительную скорость приема данных на уровне пункта назначения по сравнению с другими существующими системами в различных сценариях.Этот результат отражает эффективность и надежность нашей системы, поскольку он минимизирует трафик данных, передаваемых по сети, а также снижает потери отправленных пакетов. Кроме того, предлагаемая система основана на интеллектуальном и эффективном алгоритме, который позволяет узлам не отправлять дублирующиеся данные в каждом раунде, поскольку это вводит в сеть больше бесполезных данных и сводит к минимуму срок службы узлов и долговечность сети.
7. Мобильное приложение
Глобальный центр информации и управления нашей предлагаемой интеллектуальной системы управления дорожным движением соединяет водителей с улицами города через мобильное приложение Android по сравнению с другими существующими системами управления дорожным движением.Этот центр управления отправляет собранную информацию из центра управления парковочными местами, а также из центра управления светофорами на центральный веб-сервер для отображения доступных парковочных мест и количества пробок на каждом пересечении дорог города и обновления их в базу данных MySQL автоматически. Клиенты предлагаемой нами системы (компьютеры, смартфоны, планшеты и т. Д.) Будут делать HTTP-запросы, содержащие URL-адрес центрального сервера через Интернет. После того, как запрос прибыл в место назначения, он сначала проходит через API (интерфейс прикладного программирования), в котором есть процедура, которая связывает форму URL-адреса с действием, которое необходимо выполнить.Этот API будет связываться и взаимодействовать с сервером для получения данных. Он получает результат и форматирует его в формате данных JSON. После этого наши клиенты получают ответ на свои запросы в виде ответа JSON, который содержит данные, запрошенные для использования нашим мобильным приложением Android Smart Traffic (рис. 36).
Наше приложение Smart Traffic разработано на основе Android Studio 3.5.3 и показано на рисунке 37.Мобильный телефон используется для доступа в Интернет через Wi-Fi или сотовую сеть 3G, чтобы в режиме реального времени получать информацию о наличии парковочных мест в заданном пункте назначения, а также о существующей пробке на дорогах.
Основными функциями нашего мобильного приложения являются следующие (Рисунки 38 и 39):
(1) Мониторинг парковочных мест . Это позволяет водителю узнать количество парковочных мест, доступных в данной зоне.
(2) Мониторинг плотности трафика .Это позволяет водителю заранее знать количество пробок и интенсивность движения к заданному пункту назначения.
(3) Предложение альтернативных маршрутов . Это позволяет предлагать альтернативные маршруты вокруг данного пункта назначения.
На рисунках 38 и 39 показан дизайн нашего приложения Smart Traffic.
С помощью этого приложения для Android водители и горожане могут удаленно просматривать пробки и доступные парковочные места в режиме реального времени, чтобы избежать ненужных поездок, чтобы минимизировать дорожное движение на дорогах и свести к минимуму рассеивание CO 2 в городе .
8. Заключение
В данной работе была представлена интеллектуальная система управления трафиком, основанная на комбинированном использовании нескольких инновационных технологий IoT, таких как WSN, RFID и мобильное приложение. Система управляет сетью гибридных датчиков RFID и WSN на основе IEEE 802.15.4, которые можно быстро развернуть в любом месте за пределами города. Наша система использует эффективный и действенный алгоритм самоорганизации дерева кластеров, чтобы максимизировать производительность WSN и увеличить ее долговечность и надежность.Центральный сервер, реализующий передовые методы управления базами данных, постоянно отслеживает доступные парковочные места, а также плотность движения в городе в режиме реального времени. Кроме того, другое мобильное приложение позволяет водителям находить свободные парковочные места в пункте назначения, а также предлагает альтернативные маршруты, чтобы не перемещаться и не застревать в пробке.
В дальнейшей работе мы будем развивать предлагаемую систему в соответствии с потребностями клиентов, добавляя инновационные услуги, такие как бронирование удаленных парковочных мест, оплата онлайн-парковки и NFC, не забывая при этом улучшать наш автомобильный алгоритм.Мы предложили алгоритм самоорганизации для дальнейшего улучшения энергопотребления и дальнейшего увеличения срока службы WSN.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации этой статьи.
Справочник по системам управления движением: Глава 1 Введение
1.1 Объем и цели
Рисунок 1-1. Рочестер, штат Нью-Йорк, региональный центр управления движением.
В 1985 году Федеральное управление шоссейных дорог опубликовало второе издание Справочника по системам управления движением , в котором представлены основные технологии, используемые при планировании, проектировании и внедрении систем мониторинга и управления движением для городских улиц и автострад. Эта публикация представляет собой сборник применимых технологий, концепций и практик в области управления дорожным движением. Он оказался полезным в:
- Содействие пониманию и принятию таких систем и
- Внедрение проверенных достижений в области мониторинга и контроля трафика.
Это руководство было обновлено в 1996 году. В дополнение к описанию усовершенствований сигнальной системы с 1985 года, издание 1996 года предоставило обширную информацию о методах и оборудовании управления автострадой.
Текущее издание обновляет технологию сигнальных систем и расширяет ее до других методов управления наземным уличным движением. Большая часть материала, относящегося к автостраде, была удалена или сокращена, поскольку в настоящее время этот материал рассматривается в недавно пересмотренном Руководстве по управлению и эксплуатации автострад (FMOH) (1).
Эта обновленная версия Справочника по системам управления движением преследует следующие основные цели:
- Предоставьте сборник существующих технологий системы управления дорожным движением,
- Помощь в понимании основных элементов систем управления дорожным движением,
- Расширить точку зрения на область управления дорожным движением,
- Служит базовым справочником для практикующего дорожного инженера при планировании, проектировании и внедрении новых и эффективных систем управления дорожным движением, а
- Служит учебным пособием в области систем управления дорожным движением.
Справочник предназначен для широкого круга потенциальных пользователей — администраторов, проектировщиков дорог и инженеров по управлению дорожным движением, как опытных, так и недавно назначенных.
1.2 Краткое содержание справочника
В этом разделе кратко излагается содержание каждой главы Справочника.
ГЛАВА 2 — ТЕХНОЛОГИЯ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЛИЧИЕ И НАЛИЧИЕ ДВИЖЕНИЯ
В этой главе представлен обзор функций контроля и управления. В нем обсуждаются вопросы, связанные с межведомственной координацией, и определяются потенциальные потребности и проблемы при выборе транспортной системы.В этой главе также представлена система классификации категорий систем светофоров и обсуждаются возможные будущие разработки.
ГЛАВА 3 — КОНЦЕПЦИИ УПРАВЛЕНИЯ — ГОРОДСКИЕ И ПРИГОРОДНЫЕ УЛИЦЫ
В этой главе рассматриваются следующие темы:
- Основные переменные, связанные с потоком наземного уличного движения и их свойствами.
- Емкость, длина цикла и разделение.
- Фазировка сигнала.
- Необходимость в программном обеспечении для координации сигналов и синхронизации сигналов в автономном режиме.
- Категории согласованного контроля.
- Стратегии синхронизации сигналов и руководство по применению стратегий.
- Особые контрольные ситуации.
- Преимущества и показатели эффективности.
ГЛАВА 4 — КОНЦЕПЦИИ КОНТРОЛЯ И УПРАВЛЕНИЯ ДОСТАВКАМИ БЕСПЛАТНЫХ ДОРОГ
В этой главе дается краткое описание характера заторов на автомагистралях, типов управления автомагистралями и связи с наземными улицами. С недавно отредактированным Справочником по управлению и эксплуатации автострад (1) следует обращаться в качестве основного справочного материала по управлению автострадой.
ГЛАВА 5 — КОНЦЕПЦИИ КОНТРОЛЯ И УПРАВЛЕНИЯ — ИНТЕГРИРОВАННЫЕ СИСТЕМЫ
В этой главе рассматриваются нетрадиционные функции управления наземной улицей, которые в настоящее время получают все большее распространение.
ГЛАВА 6 — ДЕТЕКТОРЫ
В этой главе кратко описаны технологии извещателей, применимые к сигнальным системам, а также требования к установке. Недавно отредактированное руководство Traffic Detector Handbook (2) является основным источником информации по этому вопросу.
ГЛАВА 7 — МЕСТНЫЕ КОНТРОЛЛЕРЫ
В этой главе рассматриваются следующие основные темы:
- Тип операций контроллера.
- Контроллер работает под изолированным и скоординированным контролем.
- Параметры синхронизации контроллера.
- Варианты и последовательность фазирования. Типы контроллеров
- (NEMA, ATC и модель 170).
ГЛАВА 8 — УПРАВЛЕНИЕ СИСТЕМОЙ
В этой главе обсуждаются архитектуры для обычных систем управления трафиком и адаптивных систем, а также рассматривается координация временной развертки.Приведены функции центров управления трафиком сигнальной системы и приведены некоторые примеры характеристик этих центров.
ГЛАВА 9 — СВЯЗЬ
В этой главе представлен обзор альтернативных способов связи для наземных уличных систем. В нем также кратко обсуждается Национальная транспортная коммуникация для протокола ITS (NTCIP). Основным источником информации для систем управления трафиком является недавно пересмотренный Справочник по коммуникациям для систем управления движением (3).
ГЛАВА 10 — СИСТЕМЫ ИНФОРМАЦИИ ДЛЯ ПУТЕШЕСТВИЙ
В этой главе представлен обзор использования статических знаков и изменяемых информационных знаков для наземных уличных систем. Здесь также обсуждаются другие типы информационных устройств для автомобилистов. Основным источником информации для информационных систем для путешественников является Справочник по управлению и эксплуатации автомагистралей (1).
ГЛАВА 11 — ВЫБОР СИСТЕМЫ
В главах 11, 12 и 13 представлен обзор жизненного цикла процесса системного проектирования.
После ознакомления с требованиями к федеральной помощи в этой главе описываются этапы разработки системных требований высокого уровня (определение объема). Обсуждаются методы оценки возможных альтернатив, анализа затрат на коммунальные услуги и анализа затрат на прибыль.
ГЛАВА 12 — ПРОЕКТИРОВАНИЕ И ВНЕДРЕНИЕ
Материал в данном разделе:
- Помещает задачи проектирования, закупки и установки системы в перспективе по отношению к общему планированию и внедрению системы
- Описывает альтернативные подходы к закупке систем, включая выбор подрядчика.
- Описывает различные элементы процесса разработки, уделяя особое внимание содержанию тендерных документов.
- Описывает элементы подхода к управлению установкой системы.
ГЛАВА 13 — УПРАВЛЕНИЕ СИСТЕМАМИ
В этой главе описаны функции, связанные с управлением транспортной системой и центром управления трафиком, а также необходимые кадровые ресурсы. Обсуждаются требования к обслуживанию и кадровые вопросы. Также описывается необходимость оценки системы и методы ее выполнения.
ГЛАВА 14 — ЕГО ПЛАНЫ И ПРОГРАММЫ
В этой главе обсуждаются ITS America и TEA-21, а также дается обзор процесса планирования ITS на национальном, региональном / государственном уровне и уровне агентств.
1.3 Роль и влияние систем управления движением
Сигнал светофора ежедневно поражает практически всех. Даже на незагруженных маршрутах остановки у светофоров подчеркивают поездку по городу или пригороду. Школьники послушно ждут светофора, чтобы прервать движение, чтобы они могли пересечь оживленную улицу. Водители уверенно ставят свою собственную физическую безопасность и физическую безопасность своих пассажиров при выделении полосы отвода сигнала.
Люди принимают светофоры, а в некоторых случаях требуют их для обеспечения безопасности и мобильности.Водители обычно предполагают, что ответственное агентство может эффективно управлять сигналами, поэтому автомобилисты обычно сообщают только о самых очевидных неисправностях. Неэффективная эксплуатация раздражает некоторых автомобилистов, но не вызывает бурной реакции общественности. Однако неэффективность незаметно крадет доллары у населения за счет увеличения стоимости топлива и увеличения времени в пути. Пользователи обычно воспринимают сигналы как рабочие, если они становятся красными и зелеными; если они работают неоптимально, это становится проблемой, а не кризисом.
Исследования и применение демонстрируют эффективность улучшений сигнальной системы в сокращении:
- Задержки,
- остановок,
- Расход топлива,
- Выбросы загрязняющих веществ и
- Несчастные случаи
Систематическая оптимизация планов синхронизации сигналов в большинстве сигнальных систем представляет собой важный постоянный элемент управления системой управления дорожным движением.Эта оптимизация является трудоемкой и дорогостоящей для многих существующих систем управления движением. В результате количество временных планов и частота обновления временных планов часто ограничиваются ресурсами, доступными для выполнения этих функций.
Определенные системы трафика были названы адаптивными, то есть они обладают способностью автоматически изменять синхронизацию сигнала в ответ на краткосрочные и долгосрочные изменения трафика. Эти системы не только обеспечивают более эффективный контроль трафика, но также требуют меньше человеческих и финансовых ресурсов для обновления базы данных системы.Однако они часто требуют более интенсивного развертывания детекторов трафика.
1.4 Управление спросом на командировки (TDM)
Высокоразвитая система улиц, автомагистралей, автострад и некоторых видов общественного транспорта обслуживает большинство городов Северной Америки. Однако рост спроса на поездки, похоже, опережает возможность предоставлять новые или расширенные объекты и услуги. Это давление делает большой упор на снижение потребности в поездках, чтобы уменьшить загрузку объектов, особенно в часы пик.
Широкий спектр действий TDM включает:
- Продвижение неавтоматических режимов передвижения,
- Льготный режим для автомобилей с большой вместимостью (HOV),
- Льготная парковка для HOV,
- Стимулы для сокращения поездок в пиковый период,
- Удаленная работа,
- Нестандартная рабочая неделя, например, четыре дня по 10 часов, и
- Улучшения услуг транзита и паратранзита.
Многие меры TDM влияют или зависят от эффективного и действенного использования:
- Системы светофора, Системы управления движением по автостраде
- и
- Информационные системы для путешественников.
Усилия по стимулированию использования общественного транспорта становятся менее эффективными, если автобусы сталкиваются с ненужной задержкой из-за неэффективных сигналов. Использование ванпула и общественного транспорта становится более привлекательным, если эти транспортные средства могут перемещаться по незагороженным автомобильным дорогам с высокой загруженностью.
Таким образом, системы управления городами и автомагистралями, а также информационные системы для путешественников могут оказаться критически важными для эффективности работы мультимодальных транспортных средств.
1.5 Развитие системы
Разработка систем управления движением для городских улиц шла параллельно с разработкой и использованием автомобилей.После Первой мировой войны стремительный рост автомобильного движения потребовал специального персонала, сигналов и систем для решения этой проблемы.
В типичных городских районах приблизительно две трети всех транспортных средств-миль и даже более высокий процент транспортных средств-часов в пути приходится на объекты, контролируемые светофором (4). Таким образом, качество работы светофоров в значительной степени определяет качество транспортного потока в городе.
Сигналы светофора возникли на основе технологии сигнальной системы, разработанной для железных дорог.В 1914 году (5) в Кливленде, штат Огайо, был установлен первый в США светофор с электрическим приводом. В 1917 г. в Солт-Лейк-Сити была введена взаимосвязанная сигнальная система, в которой вручную управляли шестью перекрестками как единой системой (6). В 1922 году в Хьюстоне, штат Техас, 12 перекрестков контролировались одновременно с центральной транспортной вышки. Эта система оказалась уникальной благодаря использованию автоматического электрического таймера.
В 1928 году была введена гибко-прогрессивная система предопределения времени.Муниципалитеты быстро приняли эти заранее подготовленные системы, и их повсеместная установка последовала практически в каждом городе США.
Результатом их успеха стали:
- Простота (разобраться в них может практически любой электрик),
- Надежность (прочные компоненты привели к минимуму обслуживания) и
- Сравнительно невысокая стоимость.
Однако системы с предварительным расчетом времени имели ограниченную гибкость. Они могли реагировать только на прогнозируемые изменения трафика с помощью предустановленных изменений часов.Но предсказать условия движения оказалось сложно из-за необходимых усилий по сбору данных. Агентства обычно избегали изменения сроков из-за кадровых и временных ресурсов, необходимых для внесения изменений на каждом местном диспетчере перекрестков.
Управляемые движением местные контроллеры с датчиками давления стали доступны в период 1928-1930 гг. Эти контроллеры оказались первым шагом к управлению транспортными потоками, но применимы только к изолированным перекресткам.
В 1952 году Денвер, штат Колорадо, усовершенствовал современные системы управления дорожным движением, разработав и установив аналоговую компьютерную систему управления.Эта система применяет некоторые управляемые концепции управления изолированными перекрестками к сигнальным сетям. Детекторы отбора проб вводят данные о транспортном потоке, и система корректирует их синхронизацию по запросу, а не по времени суток (TOD). В период с 1952 по 1962 год в США было установлено более ста систем этого типа.
В 1960 г. в Торонто было проведено пилотное исследование с использованием цифрового компьютера для выполнения функций централизованного управления (7). Объем данных о трафике, доступных из этой формы контроля, оказался удачным побочным продуктом.В то время как компьютер, использованный для тестирования, был архаичным по сегодняшним стандартам — IBM 650 с памятью барабана около 2000 слов — успех этого подхода к системе управления побудил Торонто приступить к полномасштабному внедрению. В 1963 году город ввел под компьютерный контроль 20 перекрестков, а к 1973 году расширил систему до 885 перекрестков.
International Business Machines (IBM) начала совместную разработку в 1964 году с городом Сан-Хосе, Калифорния, с целью дальнейшей разработки компьютерной системы управления движением (8).В проекте использовался компьютер IBM 1710. Разработанные и реализованные концепции управления оказались успешными в значительном сокращении остановок, задержек и аварий.
Начиная с 1965 года, город Уичито-Фолс, штат Техас, заключил контракт на поставку компьютера управления технологическим процессом IBM 1800 для управления движением. Эта система была введена в повседневную эксплуатацию в 1966 году, контролируя 56 перекрестков в центральном деловом районе. Позже он был расширен и включил 78 перекрестков. Сан-Хосе, Калифорния, вскоре после этого перешел на компьютер IBM 1800, и аналогичные системы были установлены в Остине и Гарленде, Техас; Портланд, штат Орегон; Форт-Уэйн, Индиана и Нью-Йорк.В этих системах сигналы светофора контролировались с помощью сохраненных планов синхронизации, разработанных в автономном режиме.
В 1967 году Управление дорог общего пользования, в настоящее время Федеральное управление автомобильных дорог (FHWA), начало разработку проекта системы управления городским движением (UTCS). Система была установлена в Вашингтоне, округ Колумбия, для разработки, тестирования и оценки передовых стратегий управления дорожным движением (9). Построенный в 1972 году, он содержал 512 детекторов транспортных средств, выходы которых определяли время сигнала на 113 перекрестках.Обширные возможности обработки данных, связи и отображения были доступны для поддержки исследования стратегии управления дорожным движением. Позднее были созданы расширенная и расширенная версии программного пакета, в котором реализованы эти концепции.
В 1970-е годы также продолжались исследования и разработки программных пакетов и моделей для цифровых компьютеров и систем управления движением на базе микропроцессоров. Лаборатория транспортных и дорожных исследований (TRRL) в Великобритании разработала усовершенствованную централизованно управляемую систему дорожного движения, технику оптимизации разделения, цикла и смещения (SCOOT), в 1970-х годах, а в 1980-х годах ее реализация проходила в Глазго и других городах.SCOOT был установлен в нескольких городах Северной Америки, включая Торонто, Онтарио. Другая продвинутая система, Sydney Coordinated Adaptive Traffic System (SCATS), разработанная в Австралии, была внедрена во многих городах по всему миру. SCOOT и SCATS инициировали развертывание отзывчивых систем управления. Также начали внедряться методы адаптивного управления, представленные оптимизированными политиками адаптивного управления (OPAC) и RHODES.
Рисунок 1-2 обобщает историческое развитие систем координированного управления дорожным движением.
Опыт, накопленный в ходе этой эволюции, показывает, что существенное сокращение задержек движения, остановок, расхода топлива и выбросов транспортных средств может быть достигнуто за счет эффективности системы управления и агрессивного управления сигналами движения. Однако в обычных (неадаптивных) системах полная реализация преимуществ зависит от частого обновления планов синхронизации для оптимизации потока трафика.
Программа ACS-Lite — это текущая исследовательская инициатива FHWA, цель которой — перенести определенные методы, используемые в адаптивных системах, в среду более простых систем с обратной связью.
Рисунок 1-2. Хронология взаимосвязанных систем управления движением.
Информационные системы для водителей также расширились за счет использования всего спектра носителей, в том числе:
- Дорожные указатели на автомагистралях и улицах с динамическими знаками и информационная радиостанция,
- Коммерческие СМИ,
- Дисплеи у основных генераторов трафика,
- Интернет и
- Информация и дисплеи в автомобиле.
1.6 Текущее состояние — наблюдение и контроль дорожного движения
1980-е и начало 1990-х годов стали свидетелями повсеместного принятия и внедрения передовых систем контроля и управления движением как на автострадах, так и на городских улицах. Использование компьютера стало общепринятым способом контроля улиц и автомагистралей, и его ускорили революционные достижения и связанное с этим сокращение затрат в компьютерных, коммуникационных и электронных технологиях. Локальные микропроцессорные контроллеры практически устранили операционные ограничения, ранее налагаемые аппаратными возможностями.Сегодня ограничения на эффективную работу системы, как правило, носят не технический, а институциональный, юрисдикционный или финансовый характер.
Текущая деятельность в области систем мониторинга и контроля трафика вышла за рамки экспериментов и превратилась в развертывание эффективных операционных инструментов. Основные концепции управления были усовершенствованы благодаря опыту нескольких пользователей. Существует эффективная сеть разработчиков систем, производителей и поставщиков, предлагающих варианты выбора системы. Совместное участие правительственных агентств (федеральных, штатных, местных), коммерческих и профессиональных организаций (производителей, консультантов) продолжается в усилиях по разработке аппаратного и программного обеспечения.Яркие примеры включают разработку усовершенствованного транспортного контроллера 2070, который обеспечивает открытую архитектуру для аппаратного и программного обеспечения контроллера, и национальный протокол транспортных коммуникаций для ITS Protocol (NTCIP), который облегчает взаимодействие оборудования.
1,7 Национальная архитектура ИТС
Национальная архитектура ИТС (10) обеспечивает общую основу для планирования, определения и интеграции интеллектуальных транспортных систем. Это зрелый продукт, который отражает вклад широкого круга участников сообщества ИТС (специалистов по транспорту, системных инженеров, разработчиков систем, технических специалистов, консультантов и т. Д.).). Архитектура определяет:
- Функции (например, сбор информации о дорожной обстановке или запрос маршрута), необходимые для ITS.
- Физические объекты или подсистемы, в которых находятся эти функции (например, поле или транспортное средство).
- Информация и потоки данных, которые объединяют эти функции и физические подсистемы в единую систему.
Национальная архитектура ITS определяет пакеты пользовательских услуг и пользовательские услуги, показанные в таблице 1-1.На рис. 1-3 показан обзор физической архитектуры. Ключевые компоненты национальной архитектуры ИТС кратко изложены ниже:
Рисунок 1-3. Обзор физических объектов.
Логическая архитектура
Логическая архитектура определяет процессы (действия и функции), которые требуются для предоставления требуемых пользовательских услуг. Многие разные процессы должны работать вместе и обмениваться информацией, чтобы предоставить пользователю услугу.Процессы могут быть реализованы с помощью программного обеспечения, оборудования или микропрограмм. Логическая архитектура не зависит от технологий и реализаций. Логическая архитектура представлена читателю в виде диаграмм потоков данных (DFD) или пузырьковых диаграмм и спецификаций процессов (PSpecs).
Рыночные пакеты
ПакетыMarket представляют собой срезы физической архитектуры, предназначенные для конкретных услуг, таких как контроль улиц. Рыночный пакет объединяет несколько различных подсистем, пакетов оборудования, терминаторов и архитектурных потоков, которые обеспечивают желаемый сервис.В Таблице 1-2 указаны рыночные пакеты.
| Зона обслуживания | Маркетинговый пакет | Название рыночного пакета |
|---|---|---|
| Управление архивными данными | AD1 | ИТС магазин данных |
| AD2 | Хранилище данных ИТС | |
| AD3 | ИТС Виртуальное хранилище данных | |
| Общественный транспорт | APTS1 | Отслеживание транзитных транспортных средств |
| APTS2 | Транзитные перевозки по фиксированным маршрутам | |
| APTS3 | Транзитные операции реагирования на спрос | |
| APTS4 | Управление транзитными пассажирами и тарифами | |
| APTS5 | Безопасность транзита | |
| APTS6 | Транспортное обслуживание | |
| APTS7 | Мультимодальная координация | |
| APTS8 | Информация для транзитных путешественников | |
| Информация для путешественников | ATIS1 | Трансляция информации для путешественников |
| ATIS2 | Интерактивная информация для путешественников | |
| ATIS3 | Автономная навигация по маршруту | |
| ATIS4 | Динамическое руководство по маршруту | |
| ATIS5 | Маршрутное руководство на основе интернет-провайдера | |
| ATIS6 | Интегрированное управление перевозками / Маршрутное руководство | |
| ATIS7 | Желтые страницы и резервирование | |
| ATIS8 | Динамический райдшеринг | |
| ATIS9 | Подпись в автомобиле | |
| Управление трафиком | ATMS01 | Сетевое наблюдение |
| банкомат02 | Зонд наблюдения | |
| банкомат03 | Surface Street Control | |
| банкомат04 | Freeway Control | |
| банкомат05 | HOV Lane Management | |
| банкомат06 | Распространение информации о дорожном движении | |
| банкомат 07 | Региональная служба управления движением | |
| банкомат08 | Система управления дорожно-транспортными происшествиями | |
| банкомат 09 | Прогноз трафика и управление спросом | |
| Банкомат 10 | Электронная система взимания платы за проезд | |
| Банкомат11 | Мониторинг и управление выбросами | |
| Банкоматы12 | Данные виртуального TMC и смарт-зонда | |
| Банкоматы13 | Стандартный железнодорожный переезд | |
| Банкомат14 | Переезд повышенной сложности | |
| Банкомат15 | Координация работы железной дороги | |
| Банкоматы16 | Управление парковкой | |
| Банкоматы17 | Региональное управление парковками | |
| Банкомат 18 | Реверсивное управление полосой движения | |
| Банкоматы19 | Контроль скорости | |
| Банкомат 20 | Управление подъемным мостом | |
| Банкомат 21 | Управление перекрытием проезжей части | |
| Безопасность транспортных средств | AVSS01 | Мониторинг безопасности транспортных средств |
| AVSS02 | Контроль безопасности водителя | |
| AVSS03 | Предупреждение о продольной безопасности | |
| AVSS04 | Боковое предупреждение о безопасности | |
| AVSS05 | Предупреждение о безопасности на перекрестках | |
| AVSS06 | Предаварийное развертывание сдерживающих устройств | |
| AVSS07 | Улучшение видимости для водителя | |
| AVSS08 | Продвинутая система управления автомобилем | |
| AVSS09 | Улучшенная боковая система управления автомобилем | |
| AVSS10 | Предотвращение столкновений на перекрестках | |
| AVSS11 | Автоматизированная система автомобильных дорог | |
| Управление в чрезвычайных ситуациях | EM01 | Прием и отправка экстренных вызовов |
| EM02 | Экстренная маршрутизация | |
| EM03 | Mayday Support | |
| EM04 | Патрули дорожной службы | |
| EM05 | Защита транспортной инфраструктуры | |
| EM06 | Глобальное оповещение | |
| EM07 | Система раннего предупреждения | |
| EM08 | Реагирование на стихийные бедствия и восстановление | |
| EM09 | Управление эвакуацией и возвращением | |
| 1M10 | Информация для путешественников, пострадавших в результате стихийных бедствий | |
| Управление техническим обслуживанием и строительством | MC01 | Отслеживание ремонтно-строительных машин и оборудования |
| MC02 | Техническое обслуживание и ремонт строительных машин | |
| MC03 | Сбор данных о погоде на дорогах | |
| MC04 | Обработка и распространение метеорологической информации | |
| MC05 | Автоматическая очистка проезжей части | |
| MC06 | Зимнее обслуживание | |
| MC07 | Ремонт и строительство дорог | |
| MC08 | Управление рабочей зоной | |
| MC09 | Мониторинг безопасности рабочей зоны | |
| MC10 | Координация ремонтно-строительной деятельности |
Стандарты ИТС
СтандартыITS являются основополагающими для создания открытой среды ITS — цели, изначально поставленной U.S. Департамент транспорта (USDOT). Стандарты облегчают развертывание совместимых систем на местном, региональном и национальном уровнях, не препятствуя инновациям по мере развития технологий и новых подходов. Национальная архитектура ИТС — это эталонная структура, которая охватывает всю деятельность по разработке стандартов ИТС и обеспечивает средства обнаружения пробелов, совпадений и несоответствий между стандартами. Национальная архитектура ITS ссылается на конкретные сайты применимых стандартов и обеспечивает подключения к ним.
1.8 Связь с другими справочниками FHWA
Этот справочник является одним из серии справочников FHWA, которые были недавно выпущены или пересмотрены. Следующие справочники предоставляют информацию, которая тесно связана с рядом глав Справочника по системам управления движением (TCSH):
«Справочник по управлению и эксплуатации автострад (FMOH) (1) «Справочник по детекторам дорожного движения (TDH) (2) «Справочник по телекоммуникациям для специалистов транспорта: основы телекоммуникаций (TH) (3)Таблица 1-3 суммирует отношение материала в этих справочниках к этому документу.
| (TCSH) Глава | Другие справочники FHWA | Отношения |
|---|---|---|
| 1 Введение | FMOH | FMOH предоставляет дополнительную информацию о национальной архитектуре ИТС. |
| 4 Концепции контроля и управления для автомагистралей | FMOH | FMOH является основным источником по этой теме.TCSH предоставляет краткий обзор. |
| 6 детекторов | TDH | TDH является основным источником по этой теме. Материал TCSH в первую очередь связан с к вопросам установки. |
| 8 Управление системой | FMOH | FMOH предоставляет дополнительную информацию о центрах управления дорожным движением. |
| 9 Связь | ТН | TH является основным источником по этой теме.Обсуждение TCSH ограничено связь коммуникационных технологий с наземными улицами. |
| 10 Информационные системы для путешественников | FMOH | FMOH является основным источником по этой теме. TCSH предоставляет информацию о статическая подпись, использование CMS на наземных улицах, краткое изложение преимуществ и недостатки разных технологий. |
| 11 Выбор системы | FMOH | FMOH предоставляет дополнительную информацию о цикле проектирования системы. |
2. Кляйн, Л. «Справочник по детекторам дорожного движения». Отчет Федерального управления шоссейных дорог, Вашингтон, округ Колумбия. Будет опубликован.
3. Руководитель, С. «Справочник по телекоммуникациям для транспортных специалистов: основы телекоммуникаций». Отчет Федерального управления шоссейных дорог № FHWA-HOP-04-034, Вашингтон, округ Колумбия, сентябрь 2004 г.
4. Вагнер, Ф.А. «Обзор последствий и затрат улучшений системы управления движением». Управление планирования автомобильных дорог Федерального управления шоссейных дорог, Вашингтон, округ Колумбия, март 1980 г.
5. Мюллер, Э.А. «Транспортная профессия в двухсотлетнем году — Часть II». Транспортная инженерия, Vol. 46, No. 9, pp. 29-34, 1976.
6. Sessions, G.M. «Транспортные средства — их исторические аспекты». Институт инженеров дорожного движения. Вашингтон, округ Колумбия, 1971.
7. Ирвин, Н.А. «Система дорожных сигналов с компьютерным управлением в Торонто». Теория и инструменты управления движением. Plenum Press, New York, 1965. (См. Также: Casicato, L. и S. Cass. «Экспериментальное исследование автоматического управления дорожными сигналами с помощью электрического компьютера общего назначения.«Бюллетень Совета по исследованиям шоссе 338, 1962 г.).
8.« Исследование управления движением в Сан-Хосе », IBM Corp., март 1965 г. (первоначальный отчет).
9.« Система управления городским движением в Вашингтоне, округ Колумбия ». Управление автомобильных дорог, Министерство транспорта США, Вашингтон, округ Колумбия, сентябрь 1974 г.
10. «Национальная архитектура ИТС, версия 5.0». Федеральное управление автомобильных дорог, 2003 г.
Далее | Предыдущий
Автоматизированное наблюдение и контроль за дорожным движением
Исследование 1991 года, проведенное Техасским транспортным институтом для Федерального управления шоссейных дорог, пришло к выводу, что в столичном районе Лос-Анджелеса наблюдается самая большая загруженность дорог в США.В рамках решения этой проблемы город Лос-Анджелес разработал автоматизированную систему наблюдения и контроля дорожного движения (ATSAC). Проект ATSAC, осуществляемый Департаментом транспорта города (DOT), представляет собой компьютеризированную систему мониторинга и контроля дорожного движения, которая значительно улучшает традиционные системы управления дорожным движением. Местные исследования показали улучшение управления движением и значительное сокращение времени в пути, задержек из-за заторов, выбросов в атмосферу и расхода топлива в городе.Между своей первоначальной концепцией в 1979 году и внедрением в 1992 году на 800 перекрестках в Лос-Анджелесе ATSAC зарекомендовал себя как важный и инновационный инструмент управления дорожным движением.
Программа ATSAC имеет несколько ключевых особенностей, которые отличают ее от обычных или других систем управления дорожным движением. Он имеет адаптивную синхронизацию сигнала трафика для настройки сигналов в зависимости от дорожного движения и помогает сгладить поток городского трафика. Он способен обнаруживать дорожные происшествия или стыковки и предупреждать аварийные или ремонтные машины для отправки.Предоставляя приоритет сигнала транспортным средствам легкорельсового транспорта, он способен постоянно обнаруживать неисправности системы, так что ремонт может быть произведен немедленно. С помощью видеонаблюдения по замкнутой цепи и ретрансляции дорожной информации в режиме реального времени система стремится постоянно выявлять уровни заторов и инциденты. По сравнению с другими сигнальными системами с компьютерным управлением, ATSAC наиболее широко использует детекторы проезжей части и вычисление показателей транспортного потока для оценки своих собственных характеристик.
DOT планирует в конечном итоге охватить все 4000 сигнальных перекрестков в Лос-Анджелесе. Также в настоящее время ведется ряд доработок системы. Департамент транспорта Лос-Анджелеса сыграл решающую роль в интеграции ATSAC с демонстрационным проектом Smart Corridor Demonstration Project, который вскоре свяжет управление движением на шоссе Санта-Моника с контролем ATSAC над пятью основными улицами в Лос-Анджелесе рядом с тремя соседними городами. Основное внимание в этих совместных межправительственных усилиях уделяется распространению информации о дорожном движении среди населения с помощью различных средств массовой информации, таких как информационное радио для шоссе, изменяемые указатели и кабельное телевидение.Кроме того, DOT улучшает ATSAC, чтобы обеспечить приоритет сигнала для автобусов, а также для легкорельсовых транспортных средств, усилить видеонаблюдение и предоставить путешественникам больше информации. ATSAC имеет открытую конструкцию системы, которая может принимать технические усовершенствования в любое время.
На сегодняшний день DOT проделал замечательную работу, помогая воспроизвести систему в другом месте, при этом аналогичные системы уже работают в нескольких городах США, включая Портленд, Гонолулу и Пасадену.Персонал DOT проявил великодушие в этом процессе, организовав демонстрации ATSAC для более чем 3000 посетителей из США и 35 других стран. Настаивая на открытой, непатентованной системе, DOT позволило эффективно распространять ATSAC.
Патенты на индикатор контроля дорожного движения и патентные заявки (класс 340/907)
Номер патента: 10867512
Abstract: Изобретение обеспечивает системы и методы для интеллектуальной системы дорожной инфраструктуры (IRIS), которая упрощает работу транспортных средств и управление для подключенных автоматизированных систем автомобильных дорог (CAVH).Системы и методы IRIS предоставляют транспортным средствам индивидуально настроенную информацию и инструкции по управлению транспортным средством в реальном времени для выполнения таких задач вождения, как слежение за автомобилем, смена полосы движения и ведение по маршруту. Системы и методы IRIS также управляют транспортными операциями и услугами управления как на автострадах, так и на городских магистралях. В некоторых вариантах осуществления IRIS включает в себя одну из следующих физических подсистем или состоит из них: (1) сеть придорожных блоков (RSU), (2) сеть управления трафиком (TCU) и сеть центра управления движением (TCC), (3) бортовое устройство транспортного средства (OBU), (4) центры управления движением (TOC) и (5) облачные информационные и вычислительные услуги.
Тип: Грант
Зарегистрирован: 5 февраля 2019 г.,
Дата патента: 15 декабря 2020 г.
Цессионарий: CAVH LLC
Изобретателей: Бин Жань, Ян Чэн, Шен Ли, Чжэнь Чжан, Фань Дин, Хуачунь Тан, Юанькай Ву, Шуосюань Донг, Линьхуэй Е, Сяотянь Ли, Тяньи Чен, Кунсун Ши
Traffic Control Products, Inc.
#FREEtheMIBS — это совместная кампания, направленная на поощрение контроллеров дорожных сигналов и производителей устройств ITS, а также агентств государственного сектора к объединению для создания и совместного использования протоколов NTCIP устройств, в частности баз управляющей информации (MIB).
НА ПУТИ В ИНТЕЛЛЕКТУАЛЬНЫХ ТРАНСПОРТНЫХ СИСТЕМАХ
Предоставляем техническую экспертизу и качественную продукцию более 45 лет
Продукты
Услуги
Обучение
Форум пользователей
Traffic Control Products предлагает полную линейку продуктов для управления трафиком, включая программное и аппаратное обеспечение для проектов любого размера.
Продукты для управления трафиком приносят к вашим услугам накопленные за десятилетия знания и опыт в сфере дорожного движения и транспортировки.
Неважно, новичок ли вы или просто хотите освежить свои навыки, — онлайн-обучение Control Technologies готово вам помочь.
Общайтесь и обсуждайте идеи, проблемы, приложения и решения среди участников и коллег.
Рекомендуемые решения
Intelight — это ведущий бренд инновационных продуктов для управления трафиком от Q-Free, в том числе усовершенствованные контроллеры трафика, шкафы управления движением, мастера магистральных систем, NTCIP-совместимое локальное программное обеспечение и центральные программные системы на базе Интернета.
FLIR Интеллектуальные транспортные системы (ITS) революционизируют движение транспортных средств на дорогах по всему миру. Наши уникальные, проверенные на практике решения помогают обеспечивать безопасное и плавное движение транспортных средств, пешеходов и велосипедов.
smartmicro уже более 20 лет является лидером в области высокопроизводительных радаров и гибридных датчиков. Их датчики трафика сверхвысокой четкости (4D / UHD) оснащены самой современной системой обнаружения нескольких полос и нескольких объектов как для полосы остановки, так и для предварительного обнаружения с одного устройства.
Blyncsy решает проблемы дорожного движения завтрашнего дня с помощью современных технологий, которые помогут вам двигаться вперед быстрее. Наш полный набор аппаратных, программных и прикладных решений — это ваша экосистема для улучшения трафика во всех аспектах вашей жизни, поэтому двигайтесь вперед быстрее.
Eberle Design Inc . — ведущий производитель систем контроля безопасности перекрестков, обнаружения транспортных средств и критически важной электроники для систем управления дорожным движением, парковки / доступа, железнодорожного транспорта и аварийно-спасательных служб.
Видео по применению
CohuHD CCTV : CohuHD Costar ™ разрабатывает и производит прочные системы видеонаблюдения HD CCTV для критически важной инфраструктуры и транспорта. Их видеокамеры контролируют наиболее критические и чувствительные среды, включая транспорт, особенно движение (ИТС), морские порты, аэропорты и железные дороги.
Рекомендуемый продукт
Pelco IntelliCross — лучшее решение для обеспечения безопасности пешеходов
Intelight — это ведущий бренд инновационных продуктов для управления трафиком от Q-Free, включая усовершенствованные контроллеры трафика, шкафы управления движением, мастера магистральных систем, NTCIP-совместимое локальное программное обеспечение и центральные программные системы на базе Интернета.
Pelco IntelliCross — это ультрасовременное решение для интеллектуальных пешеходов.APS создан для решения проблем пешеходного движения доступным, удобным и экономичным способом.
Новейший продукт Pelco , IntelliCross APS, создан для решения проблем с пешеходным движением доступным, удобным и экономичным способом. Вот некоторые ключевые особенности, которые предлагает Pelco IntelliCross:
Горжусь тем, что являюсь авторизованным дистрибьютором Q-Free
Полная функциональность со всеми расширенными функциями без необходимости прокладки проводов от шкафа контроллераСамый совершенный доступный пешеходный сигнал из имеющихся
Единственная система, которая легко модернизируется на месте до централизованного управления с помощью простого добавления CIU-C к источнику питания шкафа ( дополнительные провода не требуются)
Разработано с учетом будущего
Сделано в США
Предстоящий веб-семинар, посвященный технологии аналитики безопасности DERQ
© 2021 Traffic Control Products, Inc.