КПД электродвигателей | Полезные статьи
Электрическими двигателями переменного или постоянного тока комплектуются приводы станков, насосов и вентиляторов, а также других механизмов, используемых на предприятиях тяжелой и легкой промышленности. Рентабельность производства напрямую зависит от себестоимости продукции, на которую в большой степени влияет эффективность эксплуатации оборудования, поэтому КПД и мощность электродвигателя являются основными параметрами, на основании которых выполняется подбор привода.
Определение КПД электродвигателя
Принцип работы любой электрической машины основан на преобразовании энергии тока, протекающего по обмоткам статора и создающего магнитное поле, во вращение ротора. Коэффициент полезного действия (КПД) электродвигателя определяется соотношением вырабатываемой им механической мощности на валу (p2) к полной мощности, потребляемой из сети (p1) и выражается в процентах:
η=p2/p1*100%
Факторы, влияющие на величину КПД
Коэффициент полезного действия никогда не может быть равным единице, так как существуют неизбежные потери, снижающие полезную мощность. Они делятся на три группы:
- электрические;
- магнитные;
- механические.
Электрические потери зависят от степени нагрузки двигателя и являются следствием нагрева обмоток статора, вызванного работой тока по преодолению электрического сопротивления проводников, из которых они выполнены. Поэтому максимальный КПД электродвигателя достигается, когда нагрузка на двигатель составляет 75% от максимальной расчетной величины.
Магнитные потери происходят из-за неизбежного перемагничивания активного железа статора и ротора, а также возникновения в нем вихревых токов.
Третья группа обусловлена наличием трения в подшипниках, на которых вращается вал, а также сопротивлением, оказываемым воздухом крыльчатке вентилятора и самому ротору (якорю). Из-за наличия щеточно-коллекторного узла КПД электродвигателя постоянного тока несколько ниже коэффициента полезного действия машин с короткозамкнутым ротором. Это также относится к асинхронным электродвигателям с фазным ротором из-за дополнительного трения щеток об контактные кольца.
Способы повысить КПД двигателя
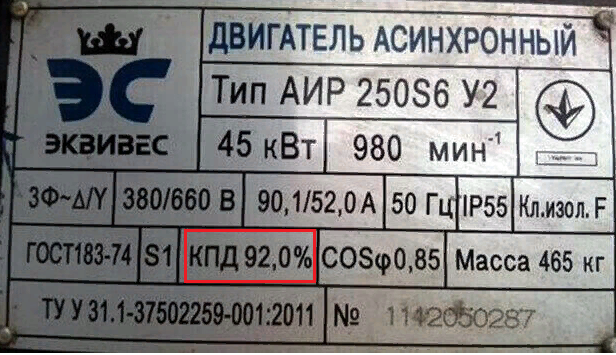
Следует помнить, что реальный коэффициент полезного действия может несколько отличатся от паспортных величин, указанных на шильдике двигателя. Чтобы выполнить расчет КПД электродвигателя в реальных условиях эксплуатации, необходимо учитывать неравномерность распределения питающего напряжения в фазах. В зависимости от величины асимметрии падение полезной мощности может достигать 5-7%.
Увеличение КПД электрической машины возможно только за счет снижения потерь и контроля качества силовой сети.
Механические потери можно уменьшить благодаря более качественным подшипникам, установки крыльчатки вентилятора, выполненной из современных материалов для уменьшения сопротивлению воздуху. Нагрев обмоток можно уменьшить благодаря использованию обмоточных проводов, выполненных из очищенной меди, имеющих меньшее сопротивление.
Снизить потери на перемагничивание активного железа и минимизировать влияние вихревых токов можно используя для набора сердечника необходимо использовать качественную электромагнитную сталь с надежной изоляцией. Кроме того, ведутся работы по разработке наилучшей геометрии зубцов статора, благодаря которым будет увеличена концентрация магнитного поля.
В реальности КПД асинхронного электродвигателя можно несколько увеличить за счет использования частотного преобразователя, позволяющего оптимизировать расход электроэнергии. Следует помнить, что эффективность эксплуатации двигателя с КПД 98% сильно упадет, если его использовать для приведения в движения механизма, имеющего более низкий коэффициент полезного действия.
Что характеризует кпд электродвигателя. Кпд электродвигателей и что влияет на его значение
В электродвигателе при преобразовании электрической энергии в механическую часть энергии теряется в виде тепла, которое сразу рассеивается в различных частях мотора и частично – в окружающей среде. Все потери делятся на три вида: механические, обмоточные и потери в стали. Причем существуют еще и добавочные потери.
Расчет потерь в электрическом двигателе
- Для расчета потерь в электродвигателе используют специальные формулы. На диаграммах можно заметить, что часть мощности, которая подается к статору из электросети, передается на ротор через зазор. Рэм – это электромагнитная мощность.
- Потери мощности непосредственно в статоре – это слагаемое потерь на вихревые токи и на частичное перемагничивание сердечника самого статора. Если рассматривать потери в стали, они настолько незначительные, что редко принимаются во внимание. Объяснить такое можно достаточно просто. Скорость вращения самого статора электродвигателя значительно выше скорости, создаваемой магнитным потоком. Так происходит только в том случае, если скорость вращения ротора полностью соответствует техническим характеристикам электромотора, заявленным производителем.
- Механическая мощность на валу ротора, как правило, меньше мощности Рэм ровно на количество потерь в обмотке. Механические потери в основном приходятся на определенное трение в подшипниках, а также на трение щеток, что характерно для электродвигателей с фазными роторами и на трение вращающихся частей, встречающих воздушную преграду.
- Добавочные потери в асинхронных электродвигателях обусловлены наличием зубчатости статора и ротора, вихревых потоков в разных узлах электродвигателя и иными потерями. При расчете такие потери уменьшают КПД электродвигателя на половину процента от номинальной мощности.
КПД электродвигателя в расчетах
Коэффициент полезного действия асинхронного электродвигателя уменьшается на суммарность потерь мощности, которые рассчитываются по формуле. Общая же сумма потерь напрямую зависит от нагрузки электродвигателя. Чем выше нагрузка, тем больше потерь и меньше КПД.
Конструирование асинхронного электродвигателя производится с учетом всех потерь при максимальной нагрузке. Поэтому данный диапазон может быть достаточно широким. Большинство асинхронных электромоторов имеет коэффициент полезного действия 80-90%. Мощные моторы выпускают с КПД от 90 до 96%.
Электрические двигатели имеют высокий коэффициент полезного действия (КПД), но все же он далек от идеальных показателей, к которым продолжают стремиться конструкторы. Все дело в том, что при работе силового агрегата преобразование одного вида энергии в другой проходит с выделение теплоты и неминуемыми потерями. Рассеивание тепловой энергии можно зафиксировать в разных узлах двигателя любого типа. Потери мощности в электродвигателях являются следствием локальных потерь в обмотке, в стальных деталях и при механической работе. Вносят свой вклад, пусть и незначительный, дополнительные потери.
Магнитные потери мощности
При перемагничивании в магнитном поле сердечника якоря электродвигателя происходят магнитные потери. Их величина, состоящая из суммарных потерь вихревых токов и тех, что возникают при перемагничивании, зависят от частоты перемагничивания, значений магнитной индукции спинки и зубцов якоря. Немалую роль играет толщина листов используемой электротехнической стали, качество ее изоляции.
Механические и электрические потери
Механические потери при работе электродвигателя, как и магнитные, относятся к числу постоянных. Они складываются из потерь на трение подшипников, на трение щеток, на вентиляцию двигателя. Минимизировать механические потери позволяет использование современных материалов, эксплуатационные характеристики которых совершенствуются из года в год. В отличие от них электрические потери не являются постоянными и зависят от уровня нагрузки электродвигателя. Чаще всего они возникают вследствие нагрева щеток, щеточного контакта. Падает коэффициент полезного действия (КПД) от потерь в обмотке якоря и цепи возбуждения. Механические и электрические потери вносят основной вклад в изменение эффективности работы двигателя.
Добавочные потери
Добавочные потери мощности в электродвигателях складываются из потерь, возникающих в уравнительных соединениях, из потерь из-за неравномерной индукции в стали якоря при высокой нагрузке. Вносят свой вклад в общую сумму добавочных потерь вихревые токи, а также потери в полюсных наконечниках. Точно определить все эти значения довольно сложно, поэтому их сумму принимают обычно равной в пределах 0,5-1%. Эти цифры используют при расчете общих потерь для определения КПД электродвигателя.
КПД и его зависимость от нагрузки
Коэффициент полезного действия (КПД) электрического двигателя это отношение полезной мо
формула, правила расчета, виды и классификация электродвигателей
В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.

Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
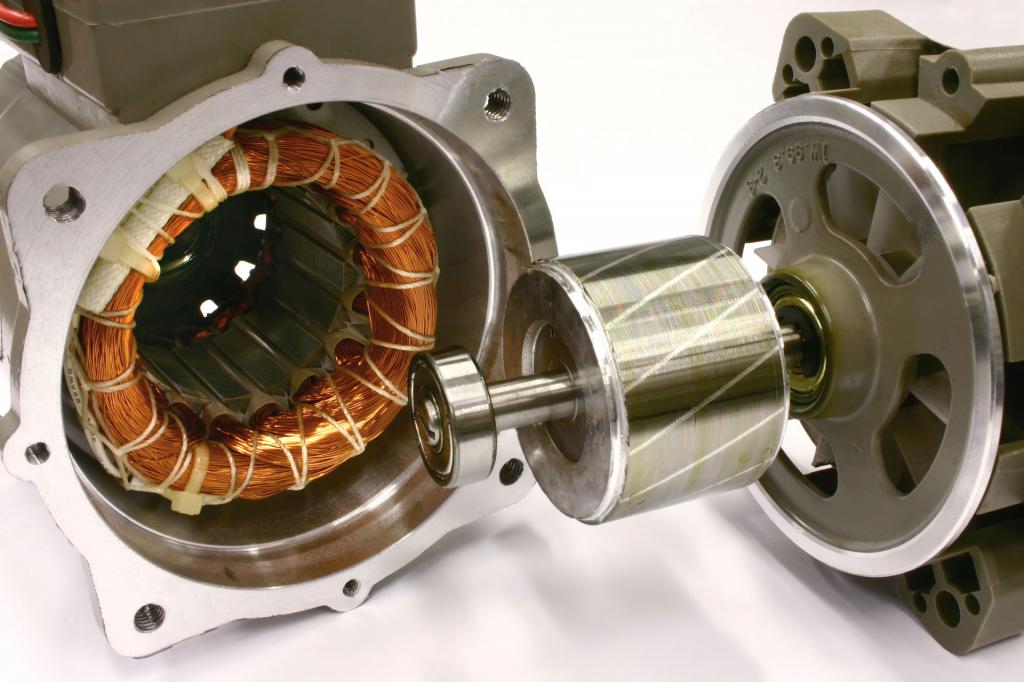
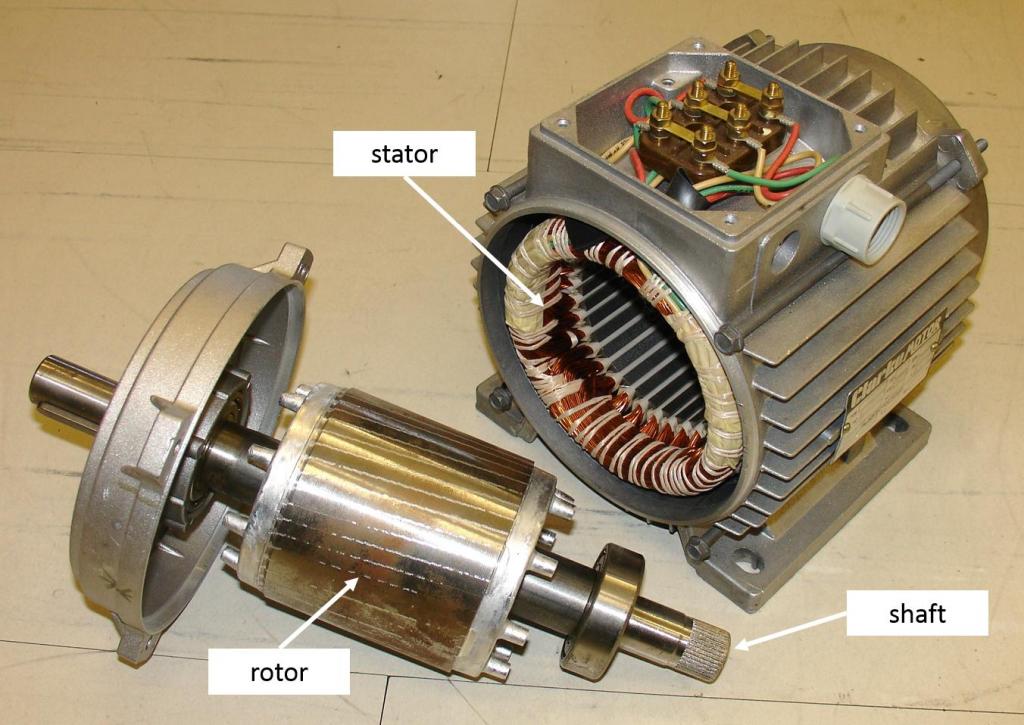
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
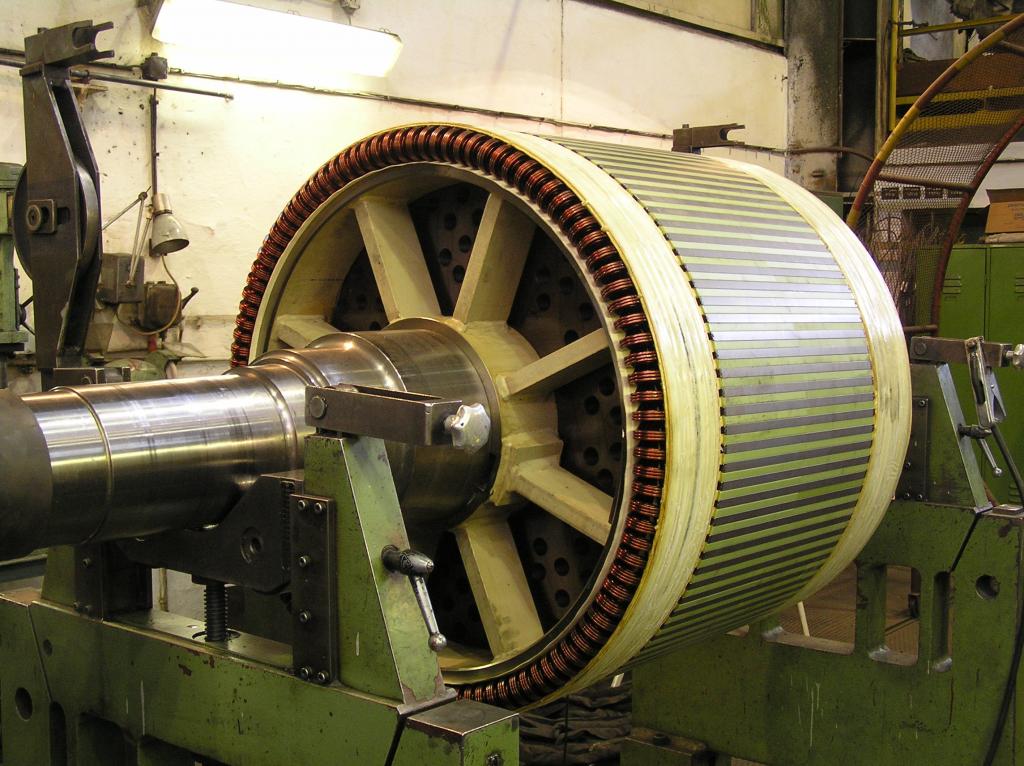
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
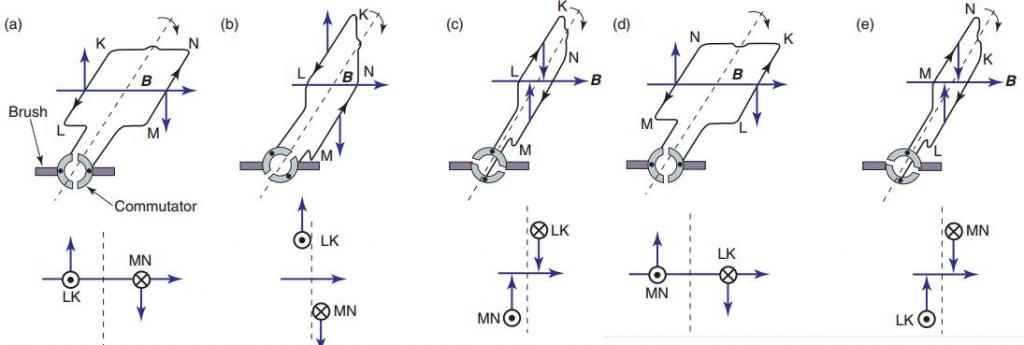
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр = nобр = f1 × 60 ÷ p = n1
где:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
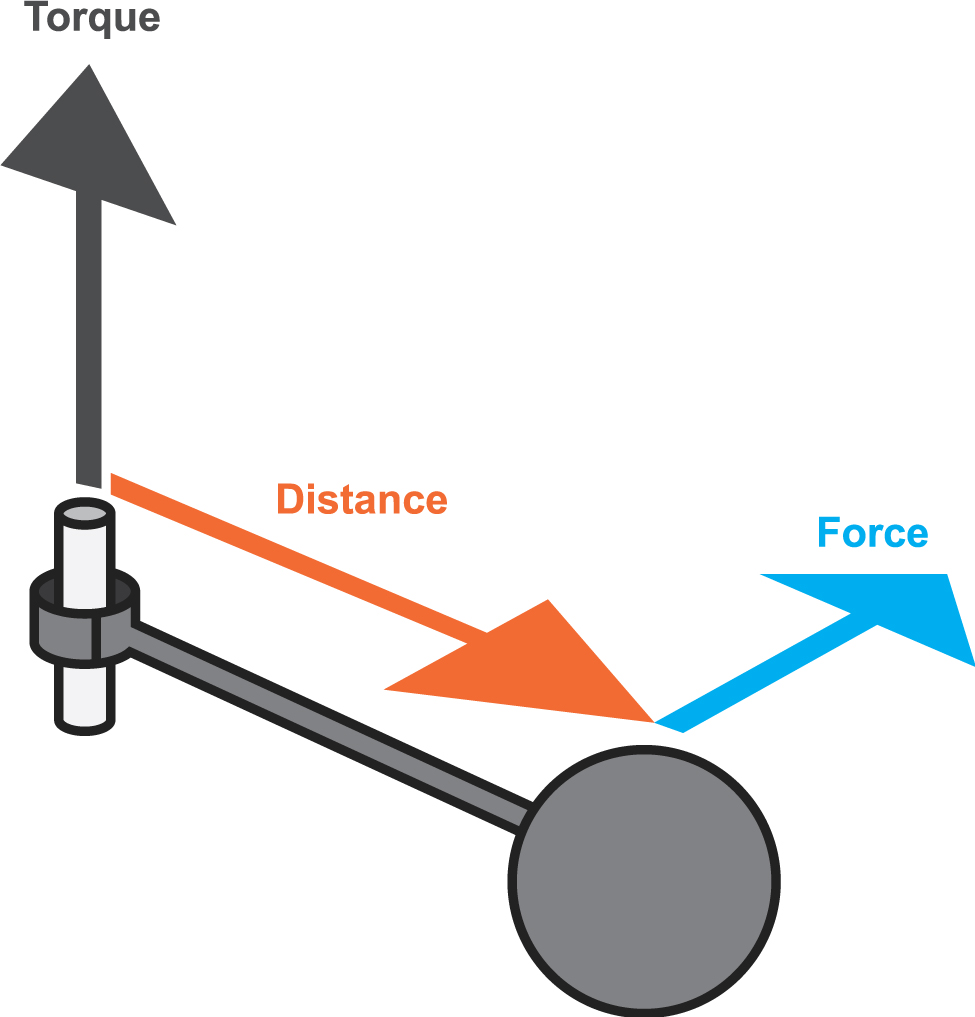
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Мощность двигателя
В общем смысле данный параметр представляет собой скалярную физическую величину, которая выражена в скорости потребления или преобразования энергии системы. Он показывает, какую работу механизм выполнит за определенную единицу времени. В электротехнике характеристика отображает полезную механическую мощность на центральном вале. Для обозначения показателя используют литеру P или W. Основной единицей измерения является Ватт. Общая формула расчета мощности электродвигателя может быть представлена как:
P = dA ÷ dt, где:
A — механическая (полезная) работа (энергия), Дж;
t — затраченное время, сек.
Механическая работа также является скалярной физической величиной, выражаемой действием силы на объект, и зависящей от направления и перемещения этого объекта. Она представляет собой произведение вектора силы на путь:
dA = F × ds, где:
s — пройденное расстояние, м.
Она выражает дистанцию, которую преодолеет точка приложенной силы. Для вращательных движений она выражается как:
ds = r × d(teta), где:
teta — угол оборота, рад.
Таким образом можно вычислить угловую частоту вращения ротора:
omega = d(teta) ÷ dt.
Из нее следует формула мощности электродвигателя на валу: P = M × omega.
Коэффициент полезного действия электромотора
КПД — это характеристика, которая отражает эффективность работы системы при преобразовании энергии в механическую. Выражается отношением полезной энергии к потраченной. По единой системе единиц измерений он обозначается как «eta» и является безразмерным значением, исчисляемым в процентах. Формула КПД электродвигателя через мощность:
eta = P2 ÷ P1, где:
P1 — электрическая (подаваемая) мощность, Вт;
P2 — полезная (механическая) мощность, Вт;
Также он может быть выражен как:
eta = A ÷ Q × 100 %, где:
A — полезная работа, Дж;
Q — затраченная энергия, Дж.
Чаще коэффициент вычисляют по формуле потребляемой мощности электродвигателя, так как эти показатели всегда легче измерить.
Снижение эффективности работы электродвигателя происходит по причине:
- Электрических потерь. Это происходит в результате нагрева проводников от прохождения по ним тока.
- Магнитных потерь. Вследствие излишнего намагничивания сердечника появляется гистерезис и вихревые токи, что важно учитывать в формуле мощности электродвигателя.
- Механических потерь. Они связаны с трением и вентиляцией.
- Дополнительных потерь. Они появляются из-за гармоник магнитного поля, так как статор и ротор имеют зубчатую форму. Также в обмотке присутствуют высшие гармоники магнитодвижущей силы.
Следует отметить, что КПД является одним из самых важных компонентов формулы расчета мощности электродвигателя, так как позволяет получить цифры, наиболее приближенные к действительности. В среднем этот показатель варьирует от 10% до 99%. Она зависит от конструктивного устройства механизма.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических характеристик двигателя является частота вращения вала. Он выражается в числе оборотов в минуту. Часто его используют в формуле мощности электродвигателя насоса, чтобы узнать его производительность. Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет физическую величину, равной количеству полных оборотов за некий промежуток времени.
Расчетная формула частоты оборотов:
n = 30 × omega ÷ pi, где:
n — частота вращения двигателя, об/мин.
Для того, чтобы найти мощность электродвигателя по формуле оборотистости вала, необходимо привести ее к расчету угловой скорости. Поэтому P = M × omega будет выглядеть следующим образом:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), где
t = 60 секунд.
Момент инерции
Этот показатель представляет собой скалярную физическую величину, которая отражает меру инертности вращательного движения вокруг собственной оси. При этом масса тела является величиной его инертности при поступательном движении. Основная характеристика параметра выражена распределением масс тела, которая равна сумме произведений квадрата расстояния от оси до базовой точки на массы объекта.В Международной системе единиц измерения он обозначается как кг·м2 и имеет рассчитывается по формуле:
J = ∑ r2 × dm, где
J — момент инерции, кг·м2 ;
m — масса объекта, кг.
Моменты инерции и силы связаны между собой соотношением:
M — J × epsilon, где
epsilon — угловое ускорение, с-2.
Показатель рассчитывается как:
epsilon = d(omega) × dt.
Таким образом, зная массу и радиус ротора, можно рассчитать параметры производительности механизмов. Формула мощности электродвигателя включает в себя все эти характеристики.
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
P = U × I.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
te = L ÷ R.
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Mст = 0.
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
Pэл = U × I, где
I — сила тока, А;
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = Pмех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.
Заключение
Электродвигатели находят применение практически во всех областях жизни человека: в быту, в производстве. Для правильного использования привода необходимо знать не только его номинальные характеристики, но и реальные. Это позволит повысить его эффективность и снизить затраты.
Мощность и коэффициент полезного действия электродвигателей | Полезные статьи
 Электрические двигатели имеют высокий коэффициент полезного действия (КПД), но все же он далек от идеальных показателей, к которым продолжают стремиться конструкторы. Все дело в том, что при работе силового агрегата преобразование одного вида энергии в другой проходит с выделение теплоты и неминуемыми потерями. Рассеивание тепловой энергии можно зафиксировать в разных узлах двигателя любого типа. Потери мощности в электродвигателях являются следствием локальных потерь в обмотке, в стальных деталях и при механической работе. Вносят свой вклад, пусть и незначительный, дополнительные потери.
Электрические двигатели имеют высокий коэффициент полезного действия (КПД), но все же он далек от идеальных показателей, к которым продолжают стремиться конструкторы. Все дело в том, что при работе силового агрегата преобразование одного вида энергии в другой проходит с выделение теплоты и неминуемыми потерями. Рассеивание тепловой энергии можно зафиксировать в разных узлах двигателя любого типа. Потери мощности в электродвигателях являются следствием локальных потерь в обмотке, в стальных деталях и при механической работе. Вносят свой вклад, пусть и незначительный, дополнительные потери.
Магнитные потери мощности
При перемагничивании в магнитном поле сердечника якоря электродвигателя происходят магнитные потери. Их величина, состоящая из суммарных потерь вихревых токов и тех, что возникают при перемагничивании, зависят от частоты перемагничивания, значений магнитной индукции спинки и зубцов якоря. Немалую роль играет толщина листов используемой электротехнической стали, качество ее изоляции.
Механические и электрические потери
Механические потери при работе электродвигателя, как и магнитные, относятся к числу постоянных. Они складываются из потерь на трение подшипников, на трение щеток, на вентиляцию двигателя. Минимизировать механические потери позволяет использование современных материалов, эксплуатационные характеристики которых совершенствуются из года в год. В отличие от них электрические потери не являются постоянными и зависят от уровня нагрузки электродвигателя. Чаще всего они возникают вследствие нагрева щеток, щеточного контакта. Падает коэффициент полезного действия (КПД) от потерь в обмотке якоря и цепи возбуждения. Механические и электрические потери вносят основной вклад в изменение эффективности работы двигателя.
Добавочные потери
Добавочные потери мощности в электродвигателях складываются из потерь, возникающих в уравнительных соединениях, из потерь из-за неравномерной индукции в стали якоря при высокой нагрузке. Вносят свой вклад в общую сумму добавочных потерь вихревые токи, а также потери в полюсных наконечниках. Точно определить все эти значения довольно сложно, поэтому их сумму принимают обычно равной в пределах 0,5-1%. Эти цифры используют при расчете общих потерь для определения КПД электродвигателя.
КПД и его зависимость от нагрузки
Коэффициент полезного действия (КПД) электрического двигателя это отношение полезной мощности силового агрегата к мощности потребляемой. Этот показатель у двигателей, мощностью до 100 кВт находится в пределах от 0,75 до 0,9. для более мощных силовых агрегатов КПД существенно выше: 0,9-0,97. Определив суммарные потери мощности в электродвигателях можно достаточно точно вычислить коэффициент полезного действия любого силового агрегата. Этот метод определения КПД называется косвенным и он может применяться для машин различной мощности. Для маломощных силовых агрегатов часто используют метод непосредственной нагрузки, заключающийся в измерениях потребляемой двигателем мощности.
КПД электрического двигателя не является величиной постоянной, своего максимума он достигает при нагрузках около 80% мощности. Достигает он пикового значения быстро и уверенно, но после своего максимума начинает медленно уменьшаться. Это связывают с возрастанием электрических потерь при нагрузках, более 80% от номинальной мощности. Падение коэффициента полезного действия не велико, что позволяет говорить о высоких показателях эффективности электродвигателей в широком диапазоне мощностей.
КПД электродвигателя
В электродвигателе при преобразовании электрической энергии в механическую часть энергии теряется в виде тепла, которое сразу рассеивается в различных частях электродвигателя и частично – в окружающей среде. Все потери делятся на три вида: механические, обмоточные и потери в стали. Существуют еще и добавочные потери.
Расчет потерь в электродвигателе
- Для расчета потерь в электродвигателе используют специальные формулы. Часть мощности, которая подается к статору из электросети, передается на ротор через зазор. Рэм – это электромагнитная мощность.
- Потери мощности непосредственно в статоре – это слагаемое потерь на вихревые токи и на частичное перемагничивание сердечника самого статора. Если рассматривать потери в стали, они настолько незначительные, что редко принимаются во внимание. Объяснить такое можно достаточно просто. Скорость вращения самого статора электродвигателя значительно выше скорости, создаваемой магнитным потоком. Так происходит только в том случае, если скорость вращения ротора полностью соответствует техническим характеристикам электромотора, заявленным производителем.
- Механическая мощность на валу ротора, как правило, меньше мощности Рэм ровно на количество потерь в обмотке. Механические потери в основном приходятся на определенное трение в подшипниках, а также на трение щеток, что характерно для электродвигателей с фазными роторами и на трение вращающихся частей, встречающих воздушную преграду.
- Добавочные потери в асинхронных электродвигателях обусловлены наличием зубчатости статора и ротора, вихревых потоков в разных узлах электродвигателя и иными потерями. При расчете такие потери уменьшают КПД электродвигателя на половину процента от номинальной мощности.
КПД электродвигателя в расчетах
Коэффициент полезного действия (КПД) асинхронного электродвигателя уменьшается на суммарность потерь мощности, которые рассчитываются по формуле. Общая же сумма потерь напрямую зависит от нагрузки электродвигателя. Чем выше нагрузка, тем больше потерь и меньше КПД.
Конструирование асинхронного электродвигателя производится с учетом всех потерь при максимальной нагрузке. Поэтому данный диапазон может быть достаточно широким. Большинство асинхронных электродвигателей имеет коэффициент полезного действия 80-90%. Мощные электродвигатели выпускаются с КПД от 90 до 96%.
Просмотров: 7873
Дата: Воскресенье, 15 Декабрь 2013
КПД электродвигателя
Коэффицент полезного действия электродвигателя
Правильный выбор электродвигателя напрямую связан с его КПД, потери КПД электродвигателя это бич промышленности и производства. Реактивные токи, сильный нагрев электродвигателя, понижение мощности и в целом складывается потеря КПД электродвигателя.
В любом электродвигателе электрическая энергия с потерей мощности превращается в механическую энергию. Потери складываются из нескольких факторов, которые я перечислю ниже.
Причины полных потерь КПД в электродвигателе
1. Магнитные (в железе статора и ротора перемагничивание, плюс еще и вихревые токи)
2. Электрических ( обмотки статора и ротора)
3. Механические потери (трение подшипников и т.д.)
КПД (коэффициент полезного действия электродвигателя) это – сравнивание отдаваемой механической энергией электродвигателя с потребляемой электродвигателем электрической энергией. Более проще звучит так, скушал электричества на три рубля, а отдал на рубль, да еще и нагрелся.
Для электродвигателя с коротко замкнутым ротором мощностью 1-17 kW КПД, как правило, равно 0.78 – 0,87, для тех кто не слишком в теме чуть разъясню. Для двигателя в 15 kW потеря в 1950 ватт считается нормой. Для любопытных поясняю эта электроэнергия преобразуется в тепло в результате, которого электродвигатель нагревается.
Охлаждение электродвигателя происходит с помощью вентилятора, который прогоняет воздух через специальные воздушные зазоры. Допускаемая норма нагрева электродвигателя класса А порядка 85 – 90С для класса В 110С градусов . Из своего опыта могу сказать если при прикосновении рука терпит , значит этот двигатель еще поработает, ну а если руку нельзя держать больше двух секунд то дело плохо и межвитковое замыкание статора уже совсем близко. Охлаждение электродвигателя это тема для другой статьи и мы к ней еще вернемся.
КПД Эл. Двигателя также зависит от нагрузки и зависимости от нагрузки меняет свое значение.
Холостой ход – КПД 0
1/4 нагрузки — КПД 0,83
1/2 нагрузки — КПД 0,87
3/4 нагрузки – КПД 0,88
Полная нагрузка — КПД 0,87
Если в сети асимметрия токов то это тоже фактор снижения КПД электродвигателя. (на трех фазах разный вольтаж) Ниже на таблице приведен пример.
Многие спрашивают от чего зависит КПД электродвигателя? — из выше перечисленных фактов мы познакомились с этим термином, в общих чертах. Для каждого типа электродвигателя свои параметры, влияющие на его коэффициент полезного действия. Прежде чем устанавливать электрооборудование необходимо просчитать все факторы, негативно влияющие на КПД электродвигателя.
Анонс: Для любителей все делать своими руками предлагаем статью Сложный ремонт дрели зачем нести в мастерскую когда можно отремонтировать самому.
Вентильный реактивный электродвигатель — Википедия
Сечение ВРД с 8 статорными и 6 роторными полюсами Сечение ВРД с 6 статорными и 4 роторными полюсами
Сечение ВРД с 6 статорными и 4 роторными полюсамиВентильный реактивный электродвигатель (ВРД) — это бесколлекторная синхронная машина, на обмотки статора которой подаются импульсы напряжения управляемой частоты, создающие вращающееся магнитное поле. Вращающий момент возникает за счет стремления ротора к положению, при котором магнитный поток статора проходит по оси ротора, изготовленного из магнитомягкого материала, с наименьшим магнитным сопротивлением[1].
Вентильные реактивные электродвигатели/генераторы имеют следующие достоинства:
- Простая конструкция
Ротор и статор выполнены в виде пакетов листового магнитомягкого материала. На роторе ВРД отсутствуют обмотки и постоянные магниты. Фазные обмотки находятся только на статоре. Для уменьшения трудоёмкости катушки обмотки статора могут изготавливаться отдельно, а затем надеваться на полюсы статора.
- Высокая ремонтопригодность
Простота обмотки якоря повышает ремонтопригодность ВРД/ВРГ, т.к. для ремонта достаточно сменить вышедшую из строя катушку.
- Отсутствие механического коммутатора
Управление электромеханическим преобразователем электропривода/генератора осуществляется с помощью высокоэффективных силовых полупроводниковых элементов — IGBT или MOSFET (HEXFET) транзисторов, надёжность которых существенно превышает надёжность любых механических деталей, например: коллекторов, щёток, подшипников.
- Отсутствие постоянных магнитов
ВРД/ВРГ не содержит постоянных магнитов ни на роторе, ни на статоре, при этом он успешно конкурирует по характеристикам с вентильными электрическими двигателями с постоянными магнитами (ВЭДПМ). В среднем, при одинаковых электрических и весогабаритных характеристиках ВРД/ВРГ имеет в 4 раза меньшую стоимость, значительно большую надёжность, более широкий диапазон частот вращения, более широкий диапазон рабочих температур. Конструктивно, по сравнению с ВЭДПМ, ВРД/ВРГ не имеет ограничения по мощности (практически, мощность ВЭДПМ ограничивается пределом около 20-40 кВТ). ВЭДПМ требуют защиты от металлической пыли, боятся перегрева и сильных электромагнитных полей, в случае короткого замыкания обмотки превращаются в самовозгорающуюся систему. Вентильные реактивные электродвигатели/генераторы свободны от всех этих недостатков.
- Малое количество меди
На изготовление ВРД/ВРГ требуется в среднем в 2-3 раза меньше меди, чем для коллекторного электродвигателя такой же мощности, и в 1,3 раза меньше меди, чем для асинхронного электродвигателя.
- Tепловыделение происходит в основном только на статоре, при этом легко обеспечивается герметичная конструкция, воздушное или водяное охлаждение
В рабочем режиме не требуется охлаждение ротора. Для охлаждения ВРД/ВРГ достаточно использовать наружную поверхность статора.
- Высокие массогабаритные характеристики
В большинстве случаев ВРД/ВРГ может быть выполнен с полым ротором. Толщина спинки ротора при этом должна быть не менее половины ширины полюса. Подбором количества полюсов статора и ротора могут быть оптимизированы массогабаритные характеристики электродвигателя/генератора, его мощность при заданном моменте и диапазоне частоты вращения.
- Низкая трудоёмкость
Простота конструкции ВРД/ВРГ снижает трудоёмкость его изготовления. В сущности, его можно изготовить даже на не специализирующемся в области электромашиностроения промышленном предприятии. Для серийного производства ВРД/ВРГ требуется обычное механическое оборудование — штампы для изготовления шихтованных сердечников статора и ротора, токарные и фрезерные станки для обработки валов и корпусных деталей. Трудоёмкие и сложные в технологическом отношении операции, например изготовление коллектора и щёток коллекторного электродвигателя или заливка клетки ротора асинхронного двигателя, здесь отсутствуют. По предварительным оценкам трудоёмкость изготовления ЭМП вентильного реактивного электродвигателя составляет на 70% меньше трудоёмкости изготовления коллекторного и на 40% меньше трудоёмкости изготовления асинхронного электродвигателя.
- Гибкость компоновки
Простота обмотки якоря и отсутствие обмотки и магнитов на роторе обеспечивает ВРД/ВРГ высокую гибкость компоновки. Конструкция электродвигателя/генератора может быть плоской, вытянутой, обращённой, секторной, линейной. Для выпуска целого типоряда электродвигателей/генераторов с различной мощностью можно использовать один и тот же комплект штампов для вырубки ротора и статора, поскольку для увеличения мощности достаточно увеличить соответственно длину набора ротора и статора. Не составляет труда изготовление машины с расположением статора как снаружи ротора, так и наоборот, а также встраивание электроники в корпус машины. Изменение коэффициента электромагнитной редукции позволяет создавать машины для облегчённых и, напротив, тяжёлых условий работы, включая моментные двигатели. Для привода некоторых рабочих машин выгоднее иметь линейные электродвигатели с возвратно-поступательным перемещением зубцового штока (аналога ротора). В ряде случаев может быть использована давно известная, но неэффективная в случае асинхронного электродвигателя конструкция дугостаторной машины, статор которой охватывает доступную для размещения дугу окружности ротора, в качестве которого может использоваться вал с зубчатым колесом.
- Высокая надёжность
Простота конструкции обеспечивает ВРД/ВРГ более высокую безотказность, чем безотказность других типов электрических машин. Конструктивная и электрическая независимость фазных обмоток обеспечивает работоспособность ВРД даже в случае полного замыкания полюсной катушки одной из фаз. ВРГ остаётся работоспособным даже после выхода из строя одной или двух фаз.
- Широкий диапазон частот вращения (от единиц до сотен тысяч об/мин)
Электромагнитная редукция позволяет создавать малогабаритные “моментные” электродвигатели для приводов роботов, манипуляторов и других низкооборотных механизмов или низкооборотные высокоэффективные генераторы для ветровых или волновых электростанций. В то же время частота вращения быстроходных ВРД/ВРГ может превышать 100000 об/мин.
- Высокий КПД в широком диапазоне частот вращения
Практически достижимый КПД вентильного реактивного электродвигателя/генератора мощностью 1 КВт может доходить до 90 % в диапазоне 5-10-кратной перестройки частоты вращения. КПД более мощных электрических машин может достигать 95-98 %.
ВРД часто путают с синхронным реактивным электродвигателем (СРД), обмотки якоря которого питаются синусоидально изменяющимися напряжениями без обратной связи по положению ротора. СРД имеет низкий КПД, который не превышает 50 % для маломощных электродвигателей и до 70 % для мощных электрических машин.
- Импульсный характер питания ЭМП обеспечивает удобную стыковку с современной цифровой электроникой
Поскольку ВРД/ВРГ питается (возбуждается) однополярными импульсами, для управления ЭМП требуется простой электронный коммутатор. Управляя скважностью импульсов силовых транзисторов электронного коммутатора можно плавно изменять форму импульсов тока фазных обмоток электродвигателя или генератора.
- Электронное управление электрическими и механическими характеристиками, режимом работы
Естественная механическая характеристика ВРД/ВРГ определяется реактивным принципом действия электрической машины и близка к гиперболической форме. Основное свойство такой характеристики — постоянство мощности на валу машины — оказывается чрезвычайно полезным для электроприводов с ограниченной мощностью источника, так как при этом легко реализуется условие его неперегружаемости. Применение замкнутой системы управления с обратными связями по скорости и нагрузке позволяет получить механические характеристики любой заданной формы, включая абсолютно жёсткие (астатические), и не ведёт к какому либо усложнению системы управления, так как её процессор обладает большой избыточностью по числу входов и выходов, быстродействию и памяти. Фактически поле доступных механических характеристик непрерывным образом покрывает все четыре квадранта плоскости момент-скорость в пределах области ограничений конкретного электропривода.
- Низкая стоимость электромеханического преобразователя
Стоимость ВРД оказывается самой низкой из всех известных конструкций электрических машин. Дорогостоящим в рассматриваемой системе электропривода можно считать электронный преобразователь, который является обязательным элементом всех современных регулируемых электроприводов. Однако, цены на изделия силовой электроники по мере развития масштабов производства имеют устойчивую тенденцию к снижению. Исключение из состава ВРД/ВРГ коммутационных аппаратов, для изготовления которых необходима непрерывно дорожающая медь, также способствует уменьшению стоимости.
Наконец, экономическая эффективность ВРД повышается также в результате существенно меньшего расхода электроэнергии, обусловленного высоким КПД электродвигателя и применением наиболее экономичных стратегий управления в динамических режимах работы.
Вентильные реактивные электродвигатели/генераторы имеют следующие недостатки[2]:
- низкий коэффициент мощности
Он обусловлен значительной величиной намагничивающей составляющей тока статора.
- низкий КПД при небольших мощностях
В реактивных двигателях мощностью в несколько десятков Вт КПД составляет 30-40%, а в двигателях мощностью до 10 Вт — не превышает 10%.
- по габаритам реактивные двигатели больше синхронных и асинхронных двигателей
Это объясняется низким КПД, малым cos(φ){\displaystyle \cos(\varphi )} и небольшой величиной реактивного момента.
- Герасимов В. Г., Кузнецов Э. В., Николаева О. В. Электротехника и электроника. Кн. 2. Электромагнитные устройства и электрические машины. — М.: Энергоатомиздат, 1997. — 288 с. — ISBN 5-283-05005-X.
- Кацман М. М., Юферов Ф. М. Электрические машины автоматических систем. — М.: Высшая школа, 1979. — 261 с.
(недоступная ссылка)